seg专题

YOLOv8---seg实例分割(制作数据集,训练模型,预测结果)
YOLOv8----seg实例分割(制作数据集,训练模型,预测结果) 内容如下:【需要软件及工具:pycharm、labelme、anaconda、云主机(跑训练)】 1.制作自己的数据集 2.在yolo的预训练模型的基础上再训练自己的模型 3.训练结束后,尝试预测图片的实体分割 1.制作数据集: 下载安装labelme: $ conda create -n labelme pyth
![YOLOv8_seg训练流程-原理解析[实例分割理论篇]](https://img-blog.csdnimg.cn/direct/190c9b22014c4bf79297b32a327507b0.png)
YOLOv8_seg训练流程-原理解析[实例分割理论篇]
本篇将介绍一下YOLOv8实例分割网络的训练流程,同样在看此篇文章之前先去看一下预测流程YOLOv8_seg预测流程-原理解析[实例分割理论篇]-CSDN博客 ,还有目标检测任务的训练流程YOLOv8训练流程-原理解析[目标检测理论篇]-CSDN博客 ,这两篇都是前置课程,下图是YOLOv8实例分割的网络结构图。 要了解YOLOv8实例分割,除了要了解上面两
![YOLOv8_seg预测流程-原理解析[实例分割理论篇]](https://img-blog.csdnimg.cn/direct/8ead4fcc99e349e8b6778e735acd409a.png)
YOLOv8_seg预测流程-原理解析[实例分割理论篇]
YOLOv8_seg的网络结构图在博客YOLOv8网络结构介绍_CSDN博客已经更新了,由网络结构图可以看到相对于目标检测网络,实例分割网络只是在Head层不相同,如下图所示,在每个特征层中增加了Mask ceofficient层(浅紫色),这和同一层的Box,cls的shape大小一样;另外还利用80×80尺度的特征图,经过卷积+上采样后得到通道数为32,分辨率为160×160的

yolov9c-seg 在自动驾驶领域的应用
由于Yolov9c-seg在自动驾驶领域的应用是一个复杂且专业的主题,涉及大量的技术细节和实际应用场景,因此,在有限的篇幅内难以详尽地介绍其所有方面。不过,我可以提供一个大致的框架和主要的应用点,帮助您了解这一技术的核心内容和重要性。 首先,我们需要了解Yolov9c-seg是什么。Yolov9c-seg是基于Yolo(You Only Look Once)目标检测算法的一个变体,结合了深度学习

自动驾驶汽车中的Yolov9c-seg算法应用及其环境感知能力
自动驾驶汽车中的Yolov9c-seg算法应用及其环境感知能力 随着科技的飞速发展,自动驾驶汽车已经从一个遥不可及的概念逐渐变为现实。在自动驾驶汽车的发展过程中,环境感知技术起到了至关重要的作用。其中,Yolov9c-seg算法以其出色的识别和定位能力,在自动驾驶汽车的环境感知中发挥着关键的作用。本文将对Yolov9c-seg算法进行详细介绍,并探讨其在自动驾驶汽车中的应用。 一、自动驾驶汽车

Windows_通过共享数据段(data_seg())实现应用程序只能被创建一次
通过data_seg()编译指令共享数据段实现程序不能多开: 如果不用cin进行阻塞,则程序会退出(达不到效果) 没有用cin阻塞的代码: #include <iostream>#include <Windows.h>#include <tchar.h>//#include "Share.h"using namespace std;#pragma data_seg("f

车道分割YOLOV8-SEG
车道分割YOLOV8-SEG,训练得到PT模型,然后转换成ONNX,OPENCV的DNN调用,支持C++,PYTHON,ANDROID开发 车道分割YOLOV8-SEG
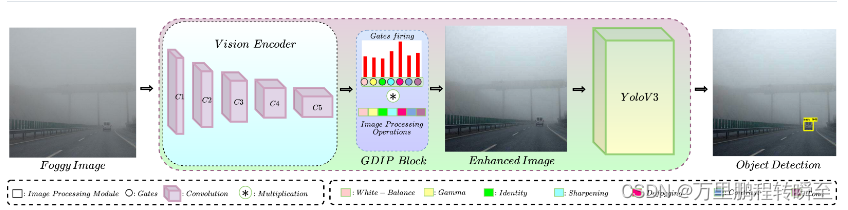
提取gdip-yolo与ia-seg中的图像自适应模块进行图像去雾与亮度增强
gdip-yolo与ia-seg都是一种将图像自适应模块插入模型前面,从而提升模型在特定数据下检测能力的网络结构。gdip-yolo提出了gdip模块,可以应用到大雾数据与低亮度数据(夜晚环境),然后用于目标检测训练;ia-seg将ia-yolo中的代码修改了一下修车了ipam模块,应用到低亮度数据(夜晚环境),然后用于语义分割训练。这两个项目都发布了预训练模型,我们可以抽取预训练模型中的图像自适
YOLOv8-Seg改进:SPPF涨点篇 |引入YOLOv9的SPPELAN
🚀🚀🚀本文改进:SPP创新结合ELAN,来自于YOLOv9,助力YOLOv8,将SPPELAN代替原始的SPPF 🚀🚀🚀YOLOv8-seg创新专栏:http://t.csdnimg.cn/KLSdv 学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研; 1)手把手教你如何训练YOLOv8-seg; 2)模型创新,提升分割性能; 3)独家自研模块助力分割;
YOLOv8-Seg改进:特征融合篇 | GELAN(广义高效层聚合网络)结构来自YOLOv9
🚀🚀🚀本文改进:使用GELAN改进架构引入到YOLOv8 🚀🚀🚀YOLOv8-seg创新专栏:http://t.csdnimg.cn/KLSdv 学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研; 1)手把手教你如何训练YOLOv8-seg; 2)模型创新,提升分割性能; 3)独家自研模块助力分割; 1.YOLOv9介绍 论文:
C# OpenVINO Crack Seg 裂缝分割 裂缝检测
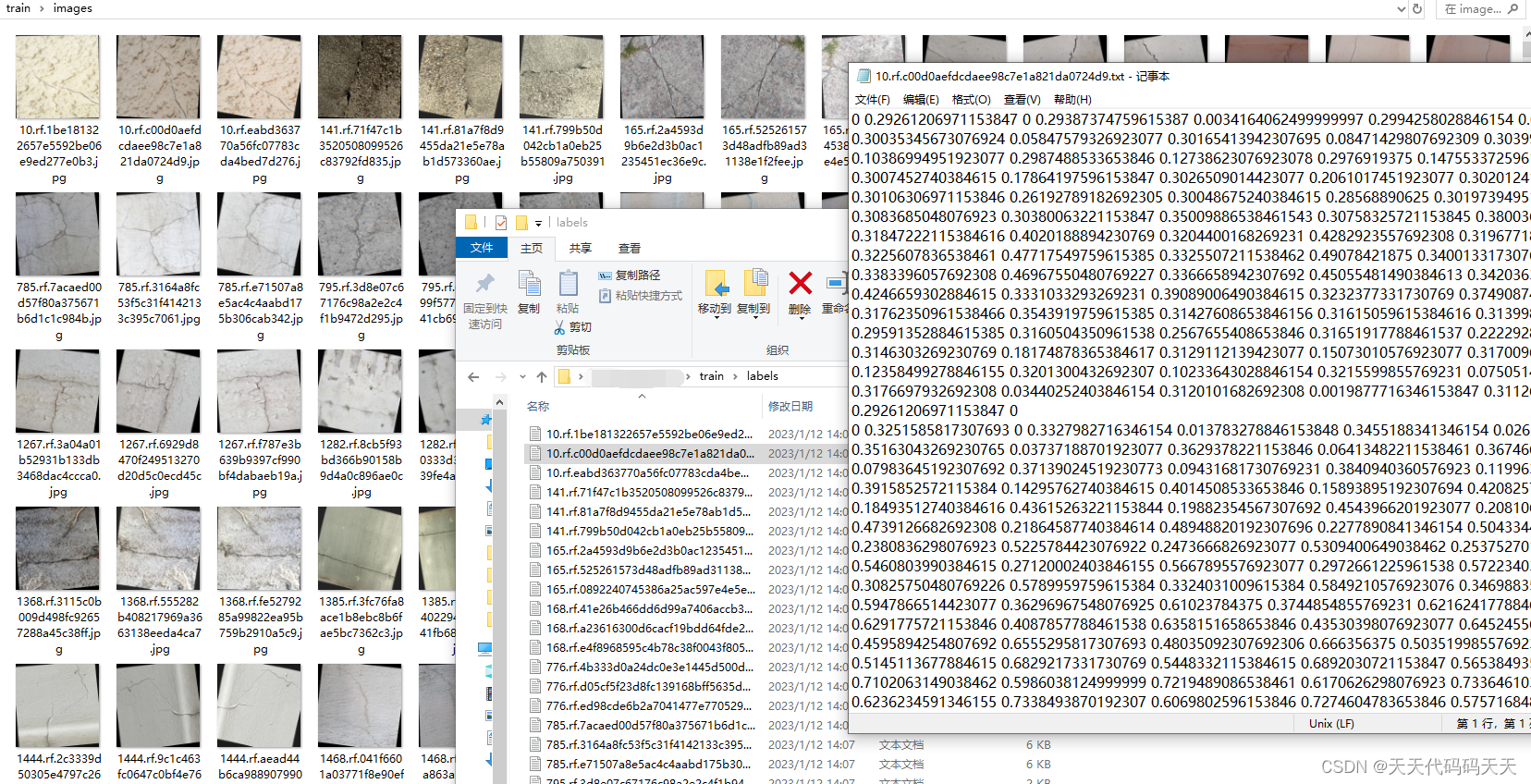
目录 效果 模型信息 项目 代码 数据集 下载 C# OpenVINO Crack Seg 裂缝分割 裂缝检测 效果 模型信息 Model Properties ------------------------- date:2024-02-29T16:35:48.364242 author:Ultralytics task:segment version:8.

使用yolo-seg模型实现自定义自动动态抠图
yolov8导航 如果大家想要了解关于yolov8的其他任务和相关内容可以点击这个链接,我这边整理了许多其他任务的说明博文,后续也会持续更新,包括yolov8模型优化、sam等等的相关内容。 YOLOv8(附带各种任务详细说明链接) 介绍 在这篇博客中,我们将探索如何使用YOLO-SEG模型来自动进行图像中对象的抠图。YOLO-SEG是一种结合了YOLO(You Only
yolov8-seg dnn调用
接上篇一直更换torch、opencv版本都无法解决这个问题(seg调用dnn报错)。那问题会不会出在yolov8源码本身呢。yolov8的讨论区基本都看过了,我决定尝试在其前身yolov5的讨论区上找找我不信没人遇到这个问题。很快找到下面的讨论第一个帖子: Fix infer yolov5-seg.onnx with opencv-dnn error by UNeedCryDear · Pul
Stable Diffusion 绘画入门教程(webui)-ControlNet(Seg)
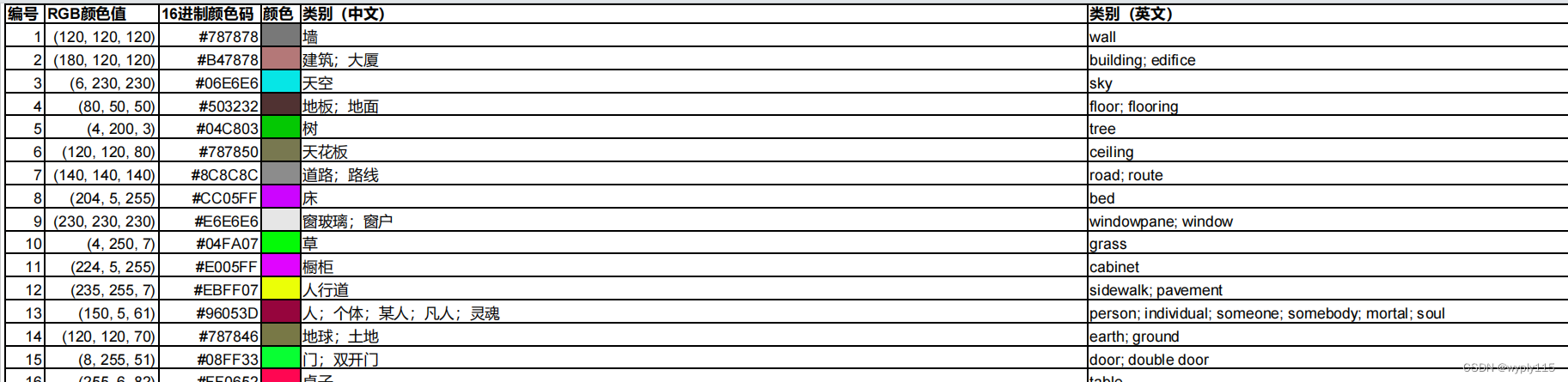
上篇文章介绍了深度Depth,这篇文章介绍下seg(Segmentation) 意思为语义分割, 通俗理解就是把图中的不同物体元素按类别不同,标为不同的颜色,不同的颜色代表不同的元素类别,如下图,左边为原图,右边就是语义分割后的预览图(还是拿之前的房子举例): 那么有什么玩法呢,如下图,我们可以保持图中物体类型不变,完全给他换一种风格: 详细步骤,和前几篇类似,不再赘述: 一、选大模
YOLOv8-Seg改进:AIFI 助力YOLO ,提升尺度内和尺度间特征交互能力 | 来自于RT-DETR
🚀🚀🚀本文改进:RT-DETR的AIFI (尺度内特征交互)助力YOLO ,提升尺度内和尺度间特征交互能力 🚀🚀🚀YOLOv8-seg创新专栏:http://t.csdnimg.cn/KLSdv 学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研; 1)手把手教你如何训练YOLOv8-seg; 2)模型创新,提升分割性能; 3)独家自研模块助力分割; 1.原理介绍
YOLOv8-Seg改进:注意力涨点系列篇 | 多尺度双视觉Dualattention | Dual-ViT,顶刊TPAMI 2023
🚀🚀🚀本文改进:多尺度双视觉Dualattention注意yolo,提升小目标检测能力 🚀🚀🚀YOLOv8-seg创新专栏:http://t.csdnimg.cn/KLSdv 学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研; 1)手把手教你如何训练YOLOv8-seg; 2)模型创新,提升分割性能; 3)独家自研模块助力分割; 1.原理介绍 论文:
YOLOv8-Seg改进:轻量化改进 | 超越RepVGG!浙大阿里提出OREPA:在线卷积重参数化
🚀🚀🚀本文改进:OREPA在线卷积重参数化巧妙的和YOLOV8结合,并实现轻量化 🚀🚀🚀YOLOv8-seg创新专栏:http://t.csdnimg.cn/KLSdv 学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研; 1)手把手教你如何训练YOLOv8-seg; 2)模型创新,提升分割性能; 3)独家自研模块助力分割; 1.OREPA介绍 论文:ht
YOLOv8-Seg改进:轻量化改进 | MobileNetV3,轻量级骨架首选
🚀🚀🚀本文改进:MobileNetV3的创新点包括:使用自适应瓶颈宽度、借鉴SENet中的Squeeze-and-Excitation机制、引入h-swish激活函数等。 🚀🚀🚀YOLOv8-seg创新专栏:http://t.csdnimg.cn/KLSdv 学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研; 1)手把手教你如何训练YOLOv8-seg; 2)模型创新,提
YOLOv5改进 | 卷积篇 | 手把手教你添加动态蛇形卷积(管道结构检测适用于分割Seg)
一、本文介绍 动态蛇形卷积的灵感来源于对管状结构的特殊性的观察和理解,在分割拓扑管状结构、血管和道路等类型的管状结构时,任务的复杂性增加,因为这些结构的局部结构可能非常细长和迂回,而整体形态也可能多变。 因此为了应对这个挑战,作者研究团队注意到了管状结构的特殊性,并提出了动态蛇形卷积(Dynamic Snake Convolution)这个方法。动态蛇形卷积通过自适应地聚焦于细长和迂回的局部结构
YOLOv8-Seg改进:Backbone改进 | 支持restnet50和restnet101
🚀🚀🚀本文改进: 将restnet50和restnet101作为backbone引入到YOLOv8-seg,下表为参数量和计算量的对比 layersparametersgradientsGFLOPsyolov8m-seg3312724022727240211

笔记-A Fixed-Point Model for Pancreas seg (MICCAI 2017)
A Fixed-Point Model for Pancreas seg (MICCAI 2017) 概述 该论文是发表在MICCAI2017会议上的一篇论文,作者将Fixed-Point Model【1】的思想(用预测的分割图来缩小输入的size)应用到胰腺分割中,主要思想是使用预测的分割图来缩小输入的size,因为相对较小的目标输入区域往往会有更好的分割精度。具体做法是:在训练阶段,直接使
基于轻量级yolov5-seg全系列【n/s/m/l/x】参数模型开发构建工业场景下不同参数量级的滚珠丝杠传动表面缺陷分割检测系统
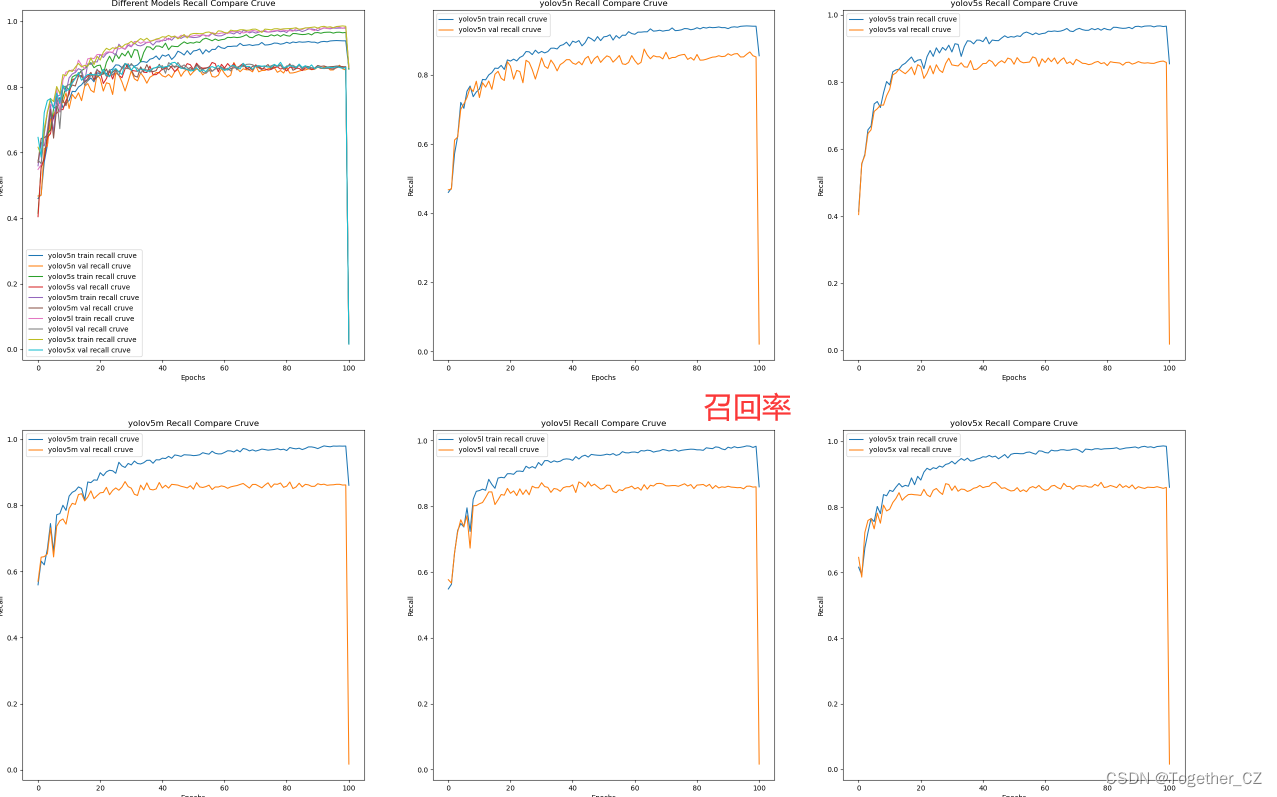
工业场景下的滚珠丝杠传动表面缺陷分割检测系统在我们前面的博文中已经有了相关的开发实践了,感兴趣的话可以自行阅读即可: 《助力工业生产质检,基于轻量级yolov5-seg开发构建工业场景下滚珠丝杠传动表面缺陷分割检测系统》 前文主要是以seg系列最为轻量级的模型作为基准开发模型来进行模型的开发构建的,本文的主要目的是想要应用开发seg全系列不同参数量级的模型来综合对比不同量级参数模型的性能结果,
助力工业生产质检,基于轻量级yolov5-seg开发构建工业场景下滚珠丝杠传动表面缺陷分割检测系统
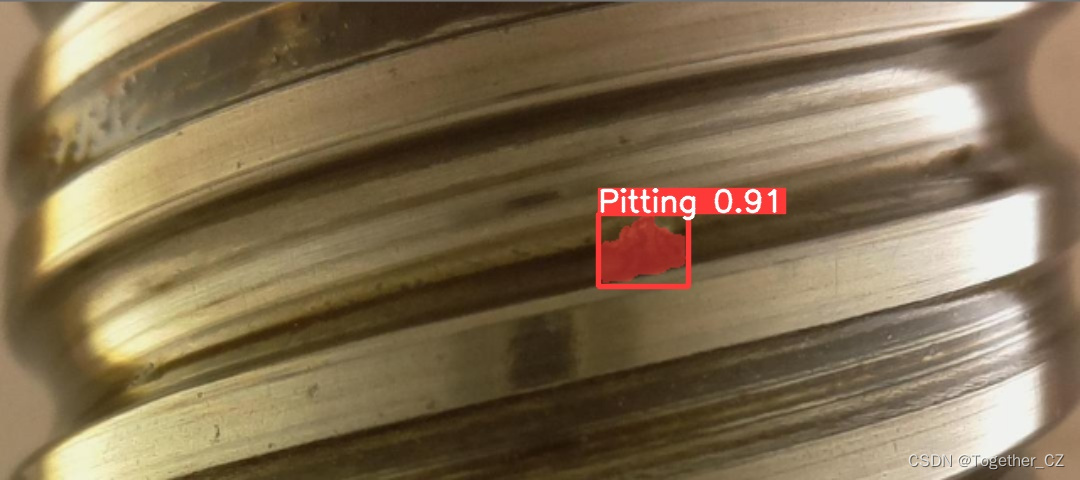
AI赋能工业生产是一个强有力的方式,在我们之前的系列博文中也有很多相应的开发实践,感兴趣的胡都可以自行移步阅读,本文的核心思想就是想要基于轻量级的实例分割模型来开发构建工业场景下的滚珠丝杠传动表面缺陷分割检测系统,首先看下实例效果: 简单看下数据集: 这里我直接使用的是官方v7.0分支的代码,项目地址在这里,如下所示: 如果不会使用可以参考我的教程: 《基于yolov5-v

yolov8-seg 分割推理流程
目录 一、分割+检测 二、图像预处理 二、推理 三、后处理与可视化 3.1、后处理 3.2、mask可视化 四、完整pytorch代码 一、分割+检测 注:本篇只是阐述推理流程,tensorrt实现后续跟进。 yolov8-pose的tensorrt部署代码稍后更新,还是在仓库:GitHub - FeiYull/TensorRT-Alpha: 🔥🔥🔥TensorR
yolov8-seg 分割推理流程
目录 一、分割+检测 二、图像预处理 二、推理 三、后处理与可视化 3.1、后处理 3.2、mask可视化 四、完整pytorch代码 一、分割+检测 注:本篇只是阐述推理流程,tensorrt实现后续跟进。 yolov8-pose的tensorrt部署代码稍后更新,还是在仓库:GitHub - FeiYull/TensorRT-Alpha: 🔥🔥🔥TensorR
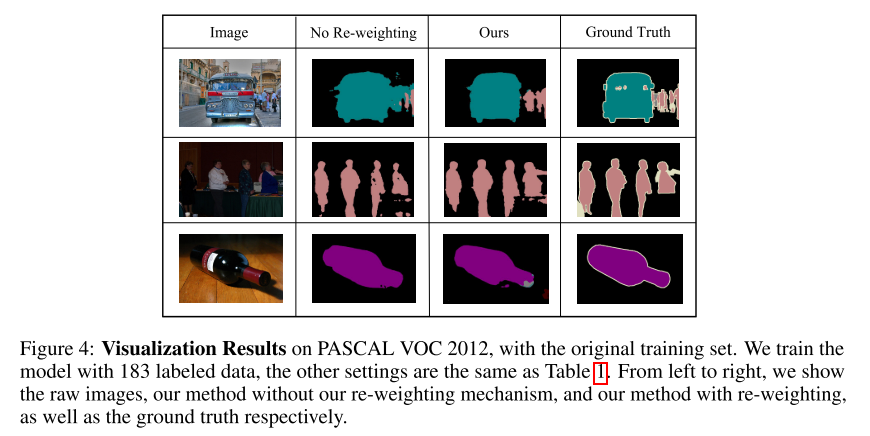
【半监督图像分割 2022 NeurIPS】GTA-Seg
文章目录 【半监督图像分割 2022 NeurIPS】GTA-Seg摘要1. 简介2. 相关工作2.1 语义分割2.2 半监督2.3 半监督分割 3. 方法3.1 准备工作3.2 温文尔雅的助教 4. 实验4.1 数据集4.2 实现细节4.3 实验结果4.4 分析 5. 总结 【半监督图像分割 2022 NeurIPS】GTA-Seg 论文题目:Semi-Supervised