rrt专题

MATLAB算法实战应用案例精讲-【采样路径规划算法】RRT算法(附MATLAB源码)
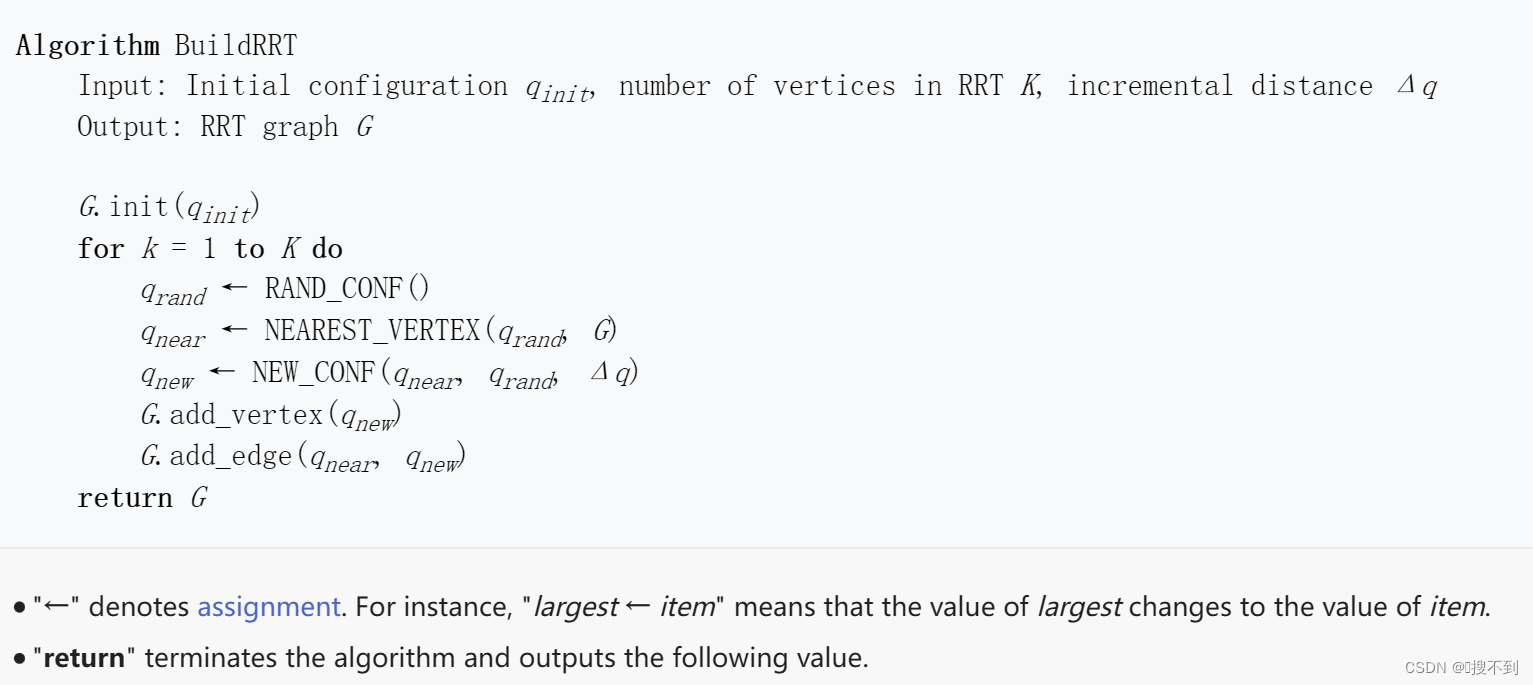
目录 前言 算法原理 算法流程 算法流程图 优缺点 伪代码 知识拓展 基于BINN算法的CCPP全路径覆盖算法 1、CCPP整体算法 2. 核心代码 代码 1.MATLAB 前言 RRT算法是适用于高维空间,通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,较好的处理带有非完整约束的路径规划问题,有效的解决了高维空间和复杂约束的路径规划问题。该算法

路径规划算法:RRT,RRT*,B-RRT*算法 - 附代码
路径规划算法:RRT,RRT*,B-RRT*算法 - 附代码 原理部分请参见他人博客: RRT算法: RRT*算法 B-RRT*算法 Matlab代码 1.RRT算法 2.RRT*算法 3.B-RRT*算法 个人资料介绍

Kinodynamic RRT-connect(Rapidly-exploring Random Tree-Connect)算法例子
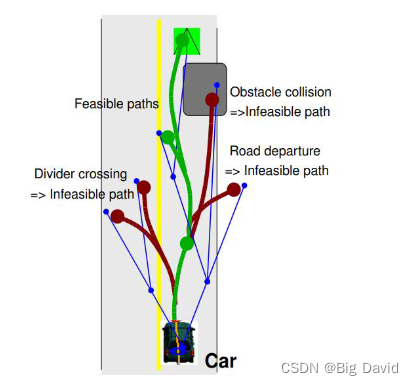
Kinodynamic RRT-connect(Rapidly-exploring Random Tree-Connect)算法 是一种结合了快速扩展随机树(RRT)和动力学约束的路径规划算法。它特别适用于需要考虑动力学和运动学约束的复杂机器人系统,如人形机器人、无人驾驶汽车等。 主要原理 RRT基本原理: RRT算法通过在空间中随机采样点,并从现有树的节点向这些随机点扩展,逐步构建一棵覆
无人驾驶(移动机器人)路径规划之RRT与RRTStar算法及其matlab实现
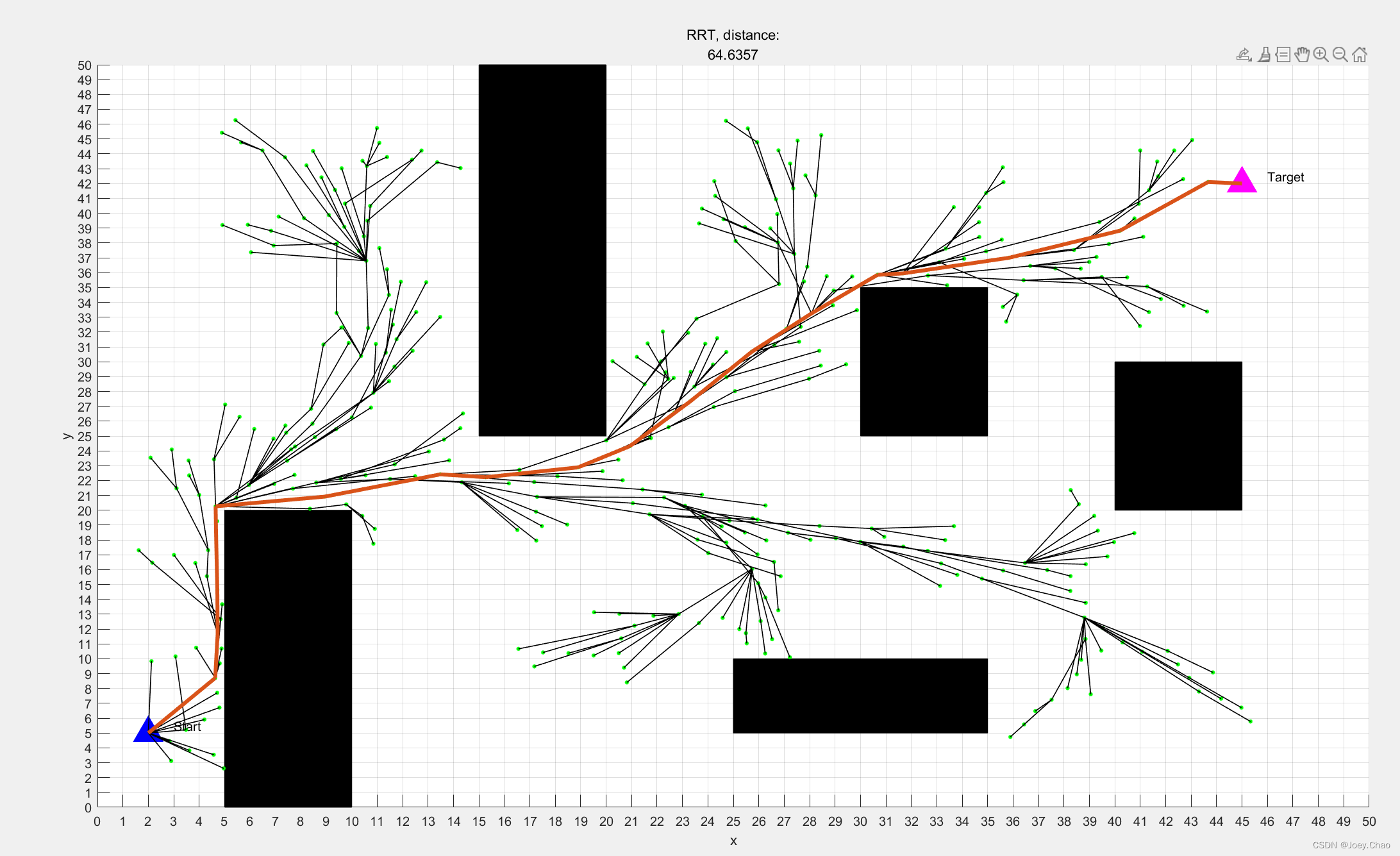
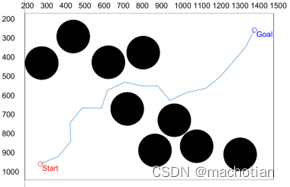
在自动驾驶与移动机器人路径规划时,必定会用到经典的算法RRT与RRT Star。下面是RRT与RRTStar的matlab实现效果。可以发现RRTStar效果明显改善。 目录 一、效果比较 1.1 RRT算法效果(黑色为障碍物,红色线为最终路径,蓝色三角形为开始点,粉色三角形为目标点) 1.2 RRTStar算法效果(黑色为障碍物,红色线为最终路径,蓝色三角形为开始点,粉色三

聊聊路径规划算法(四)——滚动在线RRT算法和BUG算法
基本RRT算法更偏向于遍历所有自由空间直到获取可行路由性,这使得它不能够进行未知或动态环境条件中的机器人实时运动计划。利用滚动计划的思路可以将RRT算法加以完善,使之更具有实时规划能力。 滚动规划 机器人在不确定的或动态周围环境中行走时,可以探知在其传感器区域内或限定区域的周围环境讯息。机器人可以使用局部信息制定局部运动规划,并使用适当的评估标准达到部分总体目标。然后机器人可以在到达部分总体
快速探索随机树-RRT
文章目录 简介原理算法运动规划的变体和改进 简介 快速探索随机树(RRT)是一种算法,旨在通过随机构建空间填充树来有效搜索非凸高维空间。该树是从搜索空间随机抽取的样本中逐步构建的,并且本质上偏向于向问题的大型未搜索区域生长。RRT 由 Steven M. LaValle 和 James J. Kuffner Jr. 开发。它们可以轻松处理障碍物和微分约束(非完整和动力学)问题,并
路径规划 | RRT结合APF算法快速探索随机树结合人工势场法的路径规划算法(Matlab)
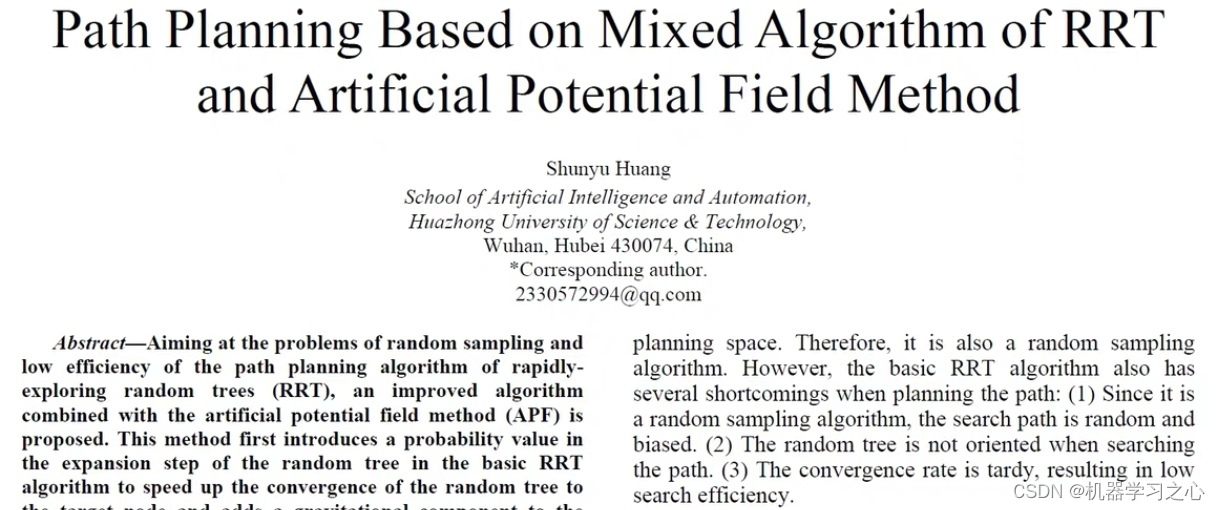
目录 效果一览基本介绍程序设计参考文献 效果一览 基本介绍 RRT结合APF算法的matlab代码。地图为可以替换的栅格地图。代码是在复现华中科技大学发表的英文论文的基础上的进一步改进。RRT算法。人工势场算法。 1.原论文方法简介:针对快速探索随机树(RRT)路径规划算法存在的随机抽样和效率低等问题,提出了一种结合人工势场法(APF)的改进算法。该方法首先在基本 RR
【RRT三维路径规划】基于matlab RRT算法无人机三维路径规划【含Matlab源码 1270期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【三维路径规划】基于matlab RRT算法无人机三维路径规划【含Matlab源码 1270期】 获取代码方式2: 付费专栏Matlab路径规划(初级版) 备注: 点击上面蓝色字体付费专栏Matlab路径规划(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab路径规划(初级版),凭支付凭证,私信博主,可免
【RRT三维路径规划】基于matlab RRT算法无人机三维路径规划【含Matlab源码 155期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【三维路径规划】基于matlab RRT算法无人机三维路径规划【含Matlab源码 155期】 获取代码方式2: 付费专栏Matlab路径规划(初级版) 备注: 点击上面蓝色字体付费专栏Matlab路径规划(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab路径规划(初级版),凭支付凭证,私信博主,可免费

【RRT三维路径规划】基于matlab RRT_Star算法三维路径规划【含Matlab源码 1571期】
一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【三维路径规划】基于matlab RRT_Star算法三维路径规划【含Matlab源码 1571期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab路径规划(初级版) 备注: 点击上面蓝色字体付费专栏Matlab路径规划(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab路径
【白话RRT系列 双向RRT路径规划 如何更快地找到回家的路】
白话RRT系列 双向RRT路径规划 更快的回家之路 1 还是小明找路回家的老问题…小明出来太久了 这次,小明的妈妈着急了,从家里出来找小明来了 小明在出发点,妈妈在目标点,一人一步走起来啦。 2 还是老套路 随机踩个点,沿着这个方向出发,走起来 这次你先走,下次我先走,不怕路难走 两个人找路,总会比一个人快一些呢 走啊走,忽然妈妈看到了小明 小明找到了妈妈 相逢的一瞬间,热泪盈眶的

动力学约束下的运动规划算法——Kinodynamic RRT*算法
一、RRT * 算法回顾 为了更好的理解Kinodynamic RRT*算法,我们先来回顾一下RRT * 算法 RRT * 先通过Sample函数随机选取一个点Xrand,然后通过Near函数找到当前树上距离Xrand最近的一个点Xnear,再通过Steer函数,沿着从Xnear到Xrand的方向走一步,步长为Stepsize,得到一
基于采样的自动驾驶规划算法 - PRM,RRT,RRT*,CL-RRT
本文将讲解PRM,RRT,RRT*自动驾驶规划算法原理,不正之处望读者指正 0 前言 机器人运动规划的基本任务:从开始位置到目标位置的运动 (1)如何躲避构型空间出现的障碍物 (2)如何满足机器人本身在机械、传感方面的速度、加速度等限制 基于采样的运动规划算法就是解决如何躲避构型空间出现的障碍物。 配置空间 机器人规划的配置空间概念:一个空间包含所有机器人自由度的机器人配置,描述为

路径规划最全综述+代码+可视化绘图(Dijkstra算法+A*算法+RRT算法等)
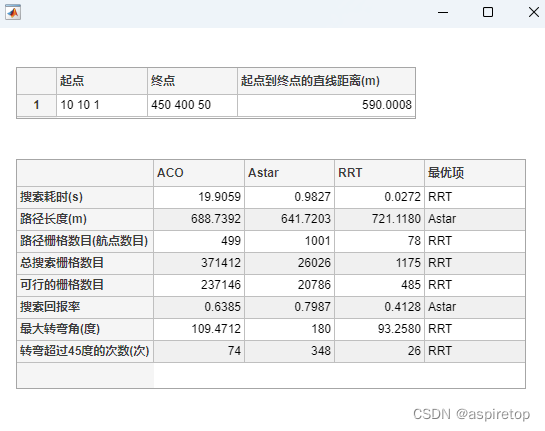
路径规划综述 1. 背景介绍 路径规划是指在给定的环境中找到从起点到终点的最佳路径的过程。它在现实生活中有着广泛的应用,包括无人驾驶、物流配送、机器人导航等领域。随着人工智能和计算机技术的发展,路径规划技术也在不断地得到改进和应用。 路径规划中常见的算法可以分为两类:基于搜索的规划和基于采样的规划。 基于搜索的规划包括 Breadth-First Searching (BFS)、Dep
【原创】【一类问题解决】有正定阵A,让求可逆阵R使得A=RTR(或A=RRT)的策略
【问题背景】有正定阵A,让求可逆阵R使得A=RTR(或A=RRT)的策略 【法一】代数法:转二次型+配方 【实操】构造A的二次型f=xTAx,将f在可逆变换x=Py下配方为规范型yTy(即=yTEy=y1²+y2²+y3²)〔即相应配方系数阵为P(-1),也即配方时令y=P(-1)x〕,此时有PTAP=E,则A=PT(-1)P(-1) ①若让求可逆阵R使得A=RTR,可取R=P^(-1) ②若让
【自主探索】基于 rrt_exploration 的单个机器人自主探索建图
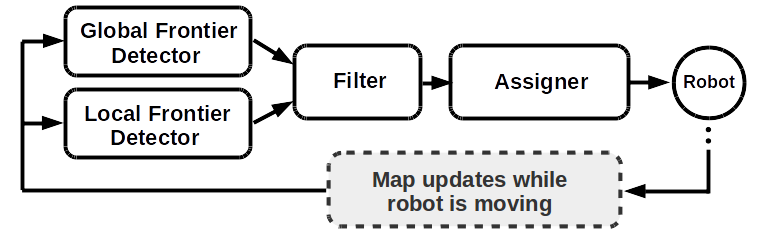
文章目录 一、rrt_exploration 介绍1、原理2、主要思想3、拟解决的问题4、优缺点 二、安装环境三、安装与运行1、安装2、运行 四、配置说明1、Robots Network2、Robot's frame names in tf3、Robot's node and topic names4、Setting up the navigation stack on the robots
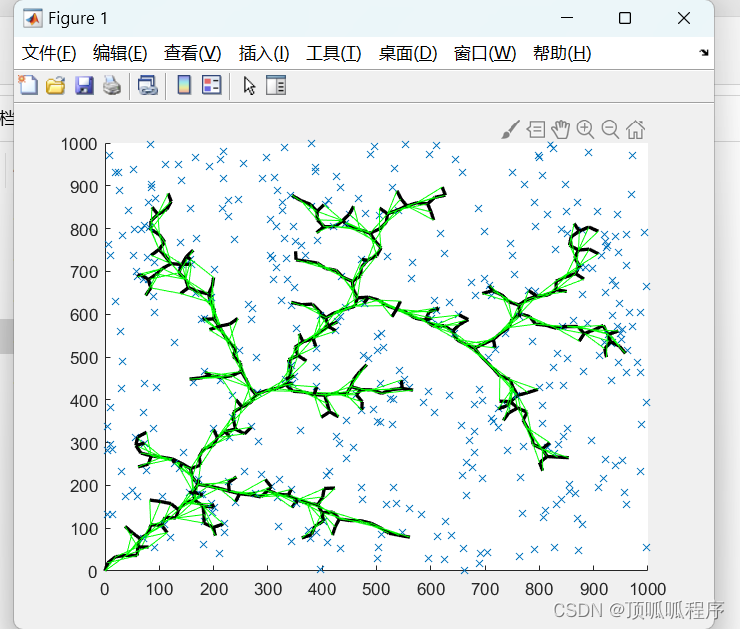
58基于matlab的采样的运动规划算法-RRT(Rapidly-exploring Random Trees)
基于matlab的采样的运动规划算法-RRT(Rapidly-exploring Random Trees),3D和2D,原始的RRT算法中将搜索的起点位置作为根节点,然后通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树的叶子节点进入目标区域,就得到了从起点位置到目标位置的路径。程序已调通,可直接运行。 58运动规划算法RRT-2D和3D (xiaohongshu.com)
39基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法
基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法,RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可以轻松处理障碍物的问题。程序中的各参数已进行详细说明,起点坐标,终点坐标,步长,迭代数等均可根据需求进行更改,程序已调通。 39matlab全局路径规划算法 (xiaohongshu.com)https:
优化过后的基于采样的路径规划算法(RRT Star)
Original RRT的一些缺陷 所得到的的路径并不是最短/最优由线段连接成的路径不光滑,不太适合机器人去执行,如下图所示。 RRT Star 是针对性地去解决RRT当中路径不是最优的情况 伪代码 RRT Star大体上与RRT是一致的 采样得到空间中的点X_rand。通过在X_rand周围进行搜索,找到其最近的领域节点X_near,搜索过程中可以用KT-Tree进行加速