本文主要是介绍39基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
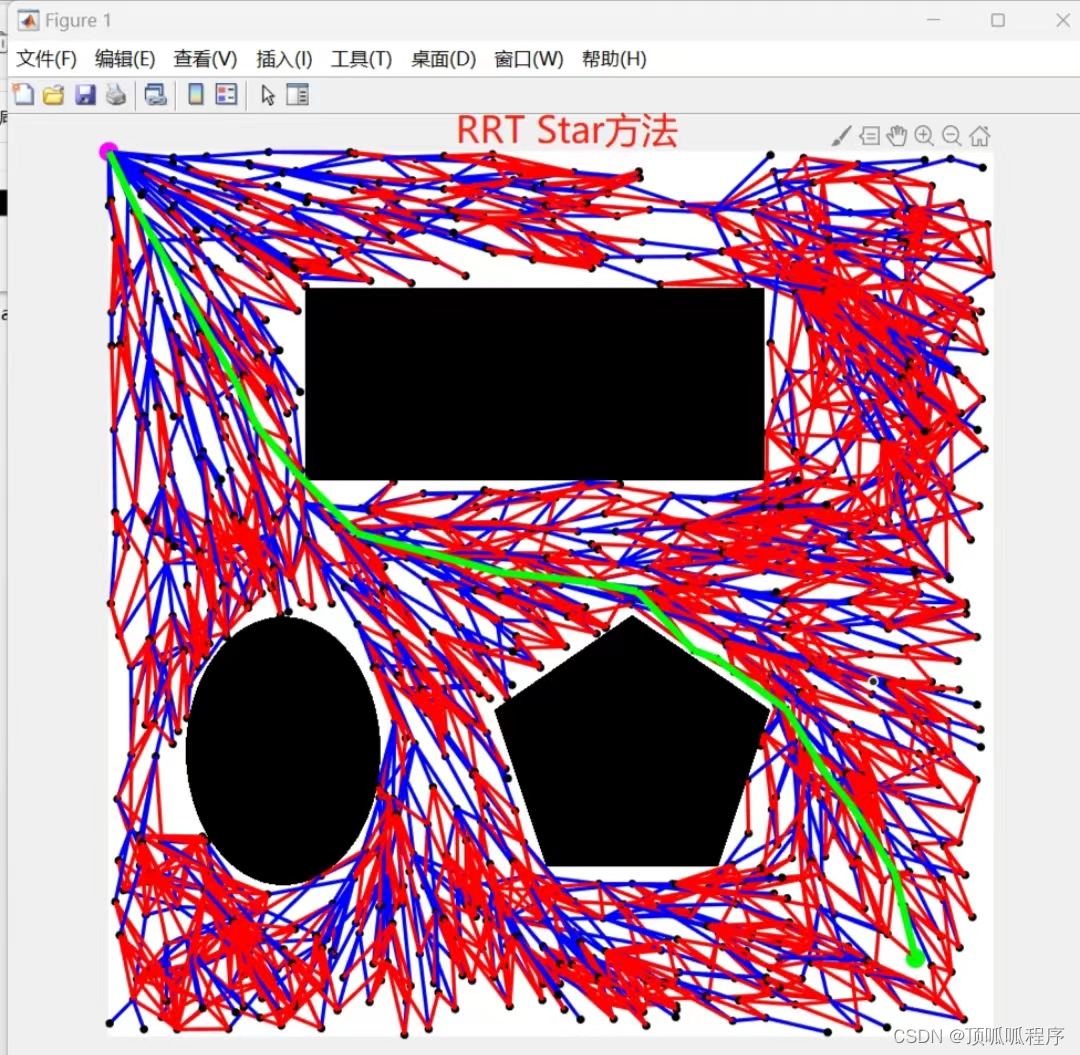
基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法,RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可以轻松处理障碍物的问题。程序中的各参数已进行详细说明,起点坐标,终点坐标,步长,迭代数等均可根据需求进行更改,程序已调通。
39matlab全局路径规划算法 (xiaohongshu.com)![]() https://www.xiaohongshu.com/explore/653e76a70000000025021b7a
https://www.xiaohongshu.com/explore/653e76a70000000025021b7a
这篇关于39基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





