本文主要是介绍58基于matlab的采样的运动规划算法-RRT(Rapidly-exploring Random Trees),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
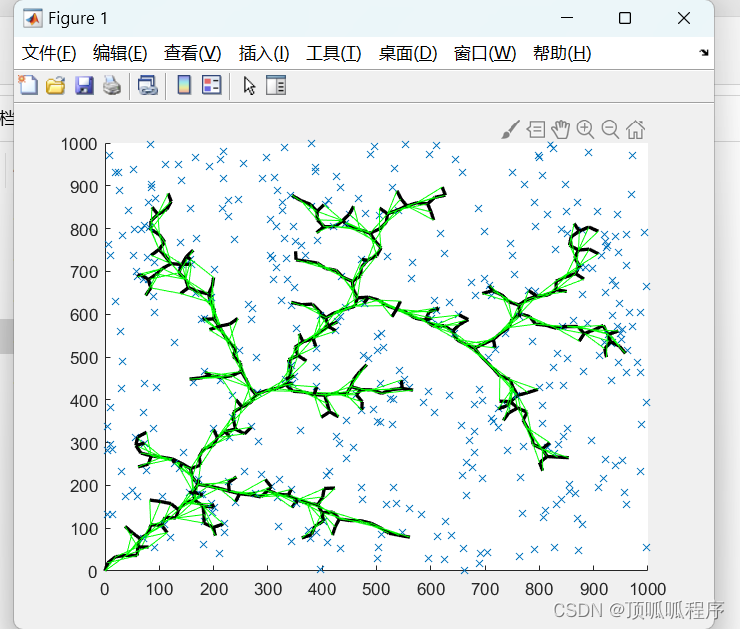
基于matlab的采样的运动规划算法-RRT(Rapidly-exploring Random Trees),3D和2D,原始的RRT算法中将搜索的起点位置作为根节点,然后通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树的叶子节点进入目标区域,就得到了从起点位置到目标位置的路径。程序已调通,可直接运行。
58运动规划算法RRT-2D和3D (xiaohongshu.com)
这篇关于58基于matlab的采样的运动规划算法-RRT(Rapidly-exploring Random Trees)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







