本文主要是介绍基于采样的自动驾驶规划算法 - PRM,RRT,RRT*,CL-RRT,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文将讲解PRM,RRT,RRT*自动驾驶规划算法原理,不正之处望读者指正
0 前言
机器人运动规划的基本任务:从开始位置到目标位置的运动
(1)如何躲避构型空间出现的障碍物
(2)如何满足机器人本身在机械、传感方面的速度、加速度等限制
基于采样的运动规划算法就是解决如何躲避构型空间出现的障碍物。
配置空间
机器人规划的配置空间概念:一个空间包含所有机器人自由度的机器人配置,描述为 C − s p a c e C-space C−space
机器人配置:表示对机器人上点的位置的描述
机器人自由度:规划的时候用最少的坐标数量去表示机器人配置
机器人配置空间:一个空间包含所有机器人自由度的机器人配置,描述为C-space
机器人的位姿在C-space中描述为一个点
机器人配置空间的意义:
在工作空间中进行规划,机器人有不同的形状和大小,需要根据不同的形状大小去做碰撞检测,是费时费力的。
在配置空间中做规划

机器人在C-space中表示一个点,障碍物做特殊的处理,把工作空间中的障碍物变成配置空间中的障碍物C-obstacle,这个工作是在运动规划前完成的,一次完成的工作。
障碍物按照机器人尺寸进行膨胀,上面机器人被设置成了一个点,只要点在障碍物外面,就不会发生碰撞
C-space = C-obstacle + C-free
经过配置空间的处理,路径规划变成了在C-free中找到起点到终点的路径寻找
1 概率路线图(PRM)

1.1 核心思想
(1)学习预处理阶段
- 在配置空间中随机采样足够密集的点
- 如果可以相互到达,连接附近的点
(2)查询搜索阶段
采用图搜索算法对G搜索,如果能找到起始点S到终点G的路线,存在可行路径
1.2 PRM主要步骤
(1)采样足够密集的点学习地图结构

(2)对采样的点碰撞检查,只保留在C-free中的采样点

(3)每个点通过直线连接到最近的邻居

(4)删除碰撞连接

(5)无碰撞连接被保留为边构造图

(6)添加起点s和终点g到Graph中

(7)利用图搜索算法A*/Dijstra在路线图里面搜索出一条最优路径

1.3 算法流程

PRM算法流程
1 learning-phase阶段:
V V V:构建的图的所有顶点的集合
E E E:图中所有边的集合
2 采样点个数为n
3 通过某种采样策略,不同分布得到采样点
4 以采样点为中心, r r r为半径,在这个圆范围内的邻居节点,把它记录到 U U U中
5 把采样点加入到顶点集 V V V中
6 遍历邻居节点集 U U U的每个节点
7-8 定义一些规则滤除一些节点和边
7 采样点 x r a n d x_{rand} xrand和已有的节点处在相同的邻接元素下,跳过
8 碰撞检测,检测 x r a n d x_{rand} xrand和 u u u是不是发生碰撞,如果Free,就把 x r a n d x_{rand} xrand和 u u u连成的边加入到 E E E中
9 重复n次之后,就得到了一个完整的图 G = ( V , E ) G = (V,E) G=(V,E)
最后应用图搜索算法在G上找到一条最优路径
sPRM算法与PRM算法的区别:
只要采样到某个节点,就把以r为半径圆里面所有的节点都进行一个连接,边比PRM多,搜索消耗的资源更大
选择节点之间的连接方式:
(1)k近邻PRM
选择采样点周围最近的k个邻居
U ← k N e a r e s t ( G = ( V , E ) , v , k ) U\gets kNearest(G=(V,E),v,k) U←kNearest(G=(V,E),v,k)
(2)有界维度PRM
就是以常规的PRM算法为基础,如果圆里面采样点过多,就找采样点的k个邻居取交集
U ← N e a r ( G , x r a n d , r ) ∩ k N e a r e s t ( G = ( V , E ) , v , k ) U\gets Near(G,x_{rand},r)\cap kNearest(G=(V,E),v,k) U←Near(G,xrand,r)∩kNearest(G=(V,E),v,k)
(3)可变半径PRM
把r为半径的圆作为采样节点个数n的函数,采样点较少情况下,r可以取大一点,采样点足够多的时候,r取小一点
PRM*算法流程
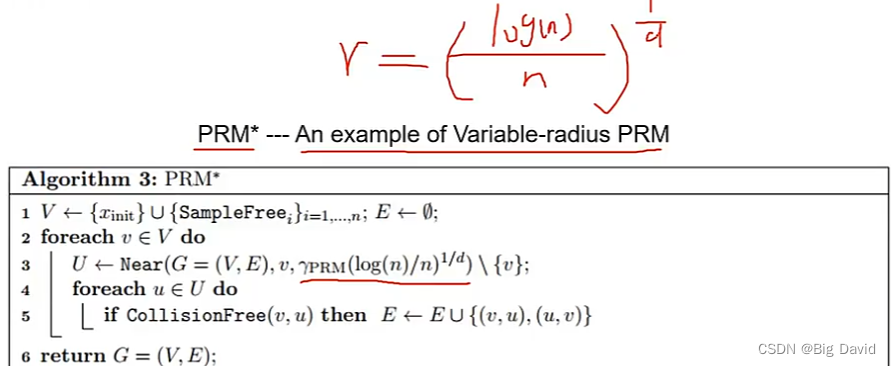
d d d:维度
n n n:采样节点个数
1.4 PRM算法的优点和缺点
优点:
概率完备性,如果运行时间足够长(或者采集足够多的点),如果有解一定是最优解
缺点:
(1)在整个状态空间上构造图,需要连接特定的开始和目标,可能浪费一些不必要的资源
(2)使用直线连接不符合车辆运动学约束
(3)抽样方法的完备性很弱,即使空间存在合理的路径,由于抽样参数的设置,也可能无法找到路径。因为随机抽样,所以该方法稳定性也不好,对于同样的问题,前后两次解不一样,在严格要求稳定性的场合不适用
采样点的数量和采样点存在通路的最大距离是路径规划成功的关键
2 RRT
2.1 RRT核心思想和特点
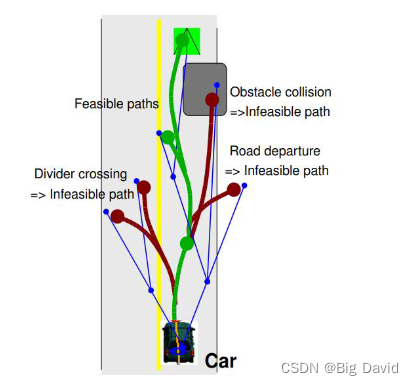
RRT是一种通过随机构建空间填充树来有效搜索非凸,高维空间的算法。
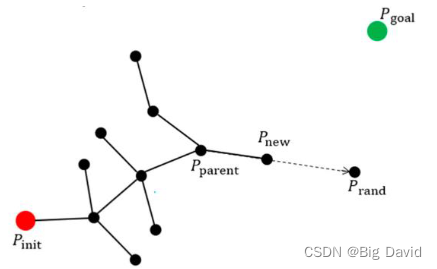
核心思想:RRT 算法首先将起点初始化为随机树的根节点,然后在机器人的可达空间中随机生成采样点,从树的根节点逐步向采样点扩展节点,节点和节点之间的连线构成了整个随机树,当某个节点与目标点的距离小于设定的阈值时,即可认为找到可行路径。

RRT的特点就是能够快速有效地搜索高维空间,通过状态空间的随机采样点,把搜索导向空白区域,从而寻找到一条从起始点到目标点的规划路径,适合解决多自由度机器人在复杂环境下和动态环境中的路径规划
2.2 算法流程
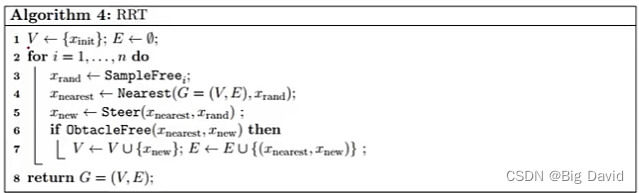
1 将 x i n i t x_{init} xinit加入到顶点集 V V V中
2 采样n次
3 随机采样得到 x r a n d x_{rand} xrand
4 图中距离 x r a n d x_{rand} xrand最近的节点 x n e a r e s t x_{nearest} xnearest
5 连接 x r a n d x_{rand} xrand和 x n e a r e s t x_{nearest} xnearest,之间的节点 x n e w x_{new} xnew
6-7 只有通过碰撞检测,才会把 x n e w x_{new} xnew加入顶点集 V V V,连接 x n e a r e s t x_{nearest} xnearest和 x n e w x_{new} xnew
2.3 RRT优缺点
优点:
(1)简单找到起点到终点的路径,比PRM更高效,该算法通过尽可能少地探索环境,来实现有效的单一路径规划,对未知环境适应能力强
(2)RRT 算法通过随机树向未观察的空间区域生长,并且不会回归到已经探索过的区域,这实现了对空间的快速探索
(3)搜索方法不是维持固定的栅格结构,而是在运行中构建随机树,通过随机树内部的节点的连接找到路径。
缺点:
(1)不满足概率完备性,只能连接最近的节点
(2)需要对输入空间进行离散化,采样次数太少,则生成的路径将表现出较差的性能,采样次数太多则会增加整个规划过程的计算量,降低路径规划的实时性
(3)RRT算法生成的路径存在冗余的节点,增加机器人实际运行中的路程
2.4 RRG
RRT的变体,具有概率完备性

核心思想:
不要只连接 x n e w x_{new} xnew和 x n e a r e s t x_{nearest} xnearest
尝试连接到半径内的所有顶点
最后需要接入图搜索算法寻找一条最优路径,违背了RRT的初衷,没有把构造图和搜索步骤合二为一
2.5 基于运动学的RRT
区别在于5 使用基于运动学的方法来引导两个节点
3 RRT*
3.1 核心思想
(1)相比于RRG算法,维护树结构而不是图,会从图中删除多余的边
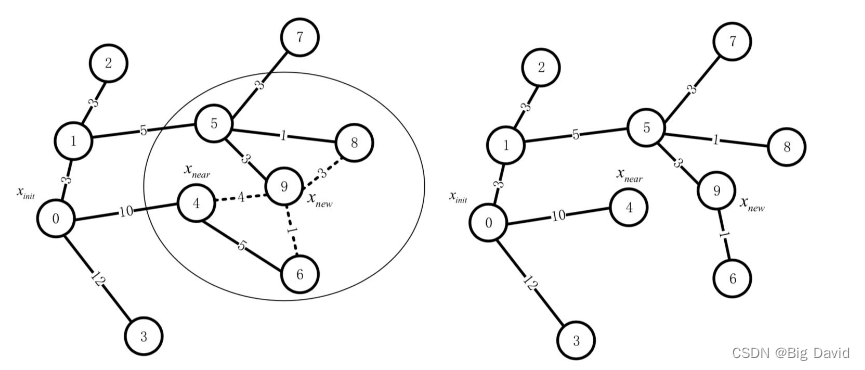
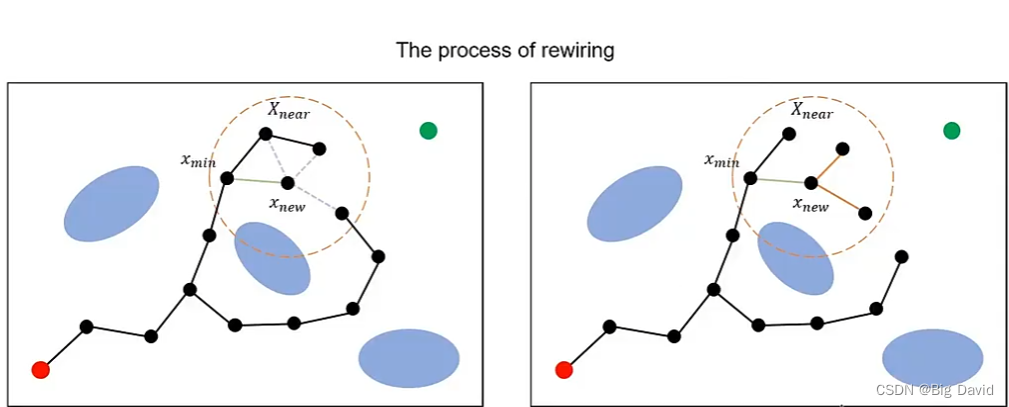
(2)相比于RRT算法,添加了“rewire"操作(每次采样到新的节点,会把以他为圆心,半径为r的圆内其他节点作为一个考量,对这些节点做一些修剪的操作)确保通过最小成本路径到达顶点
3.2 RRT*算法流程
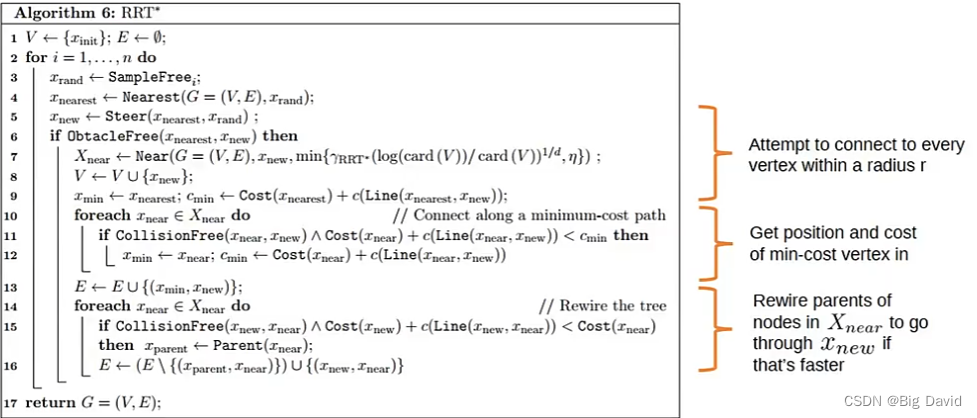
前半部分与RRT相同
后半部分
(1)连接以r为半径的圆的所有顶点,在集合中选择cost最小的去连接
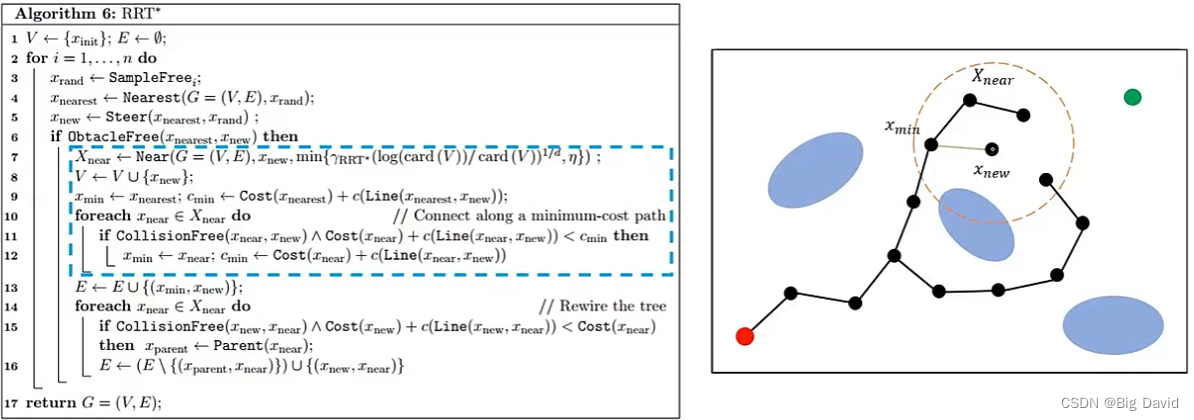
(2)得到了 x n e a r x_{near} xnear,依次遍历每一个节点,判断累计成本最小的,将 x n e a r x_{near} xnear标记为 x m i n x_{min} xmin:保证 x n e w x_{new} xnew本身的最优性
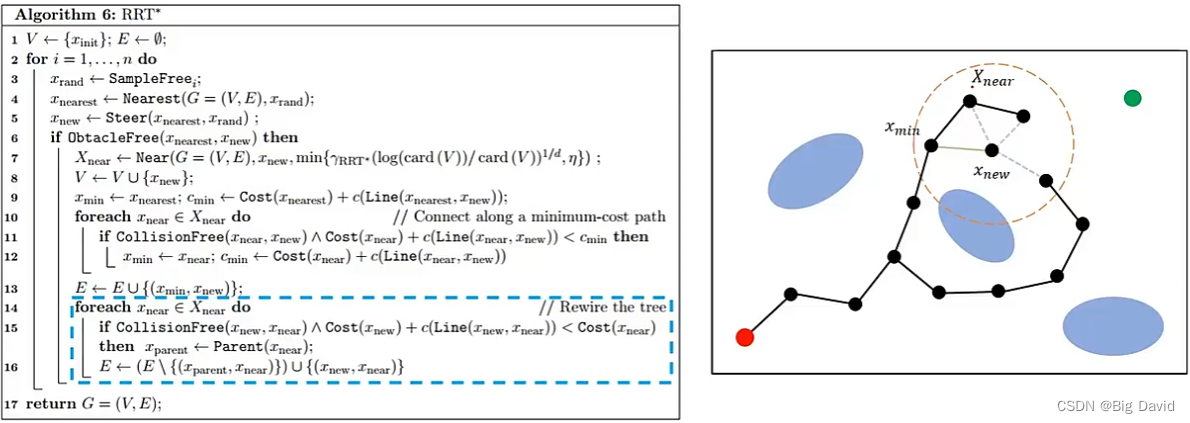
(3)对树做修剪:每次采样到 x n e w x_{new} xnew之后,周围其他节点都会做一次检查,判断是否能找到cost最小的路径
4 CL-RRT
核心思想:
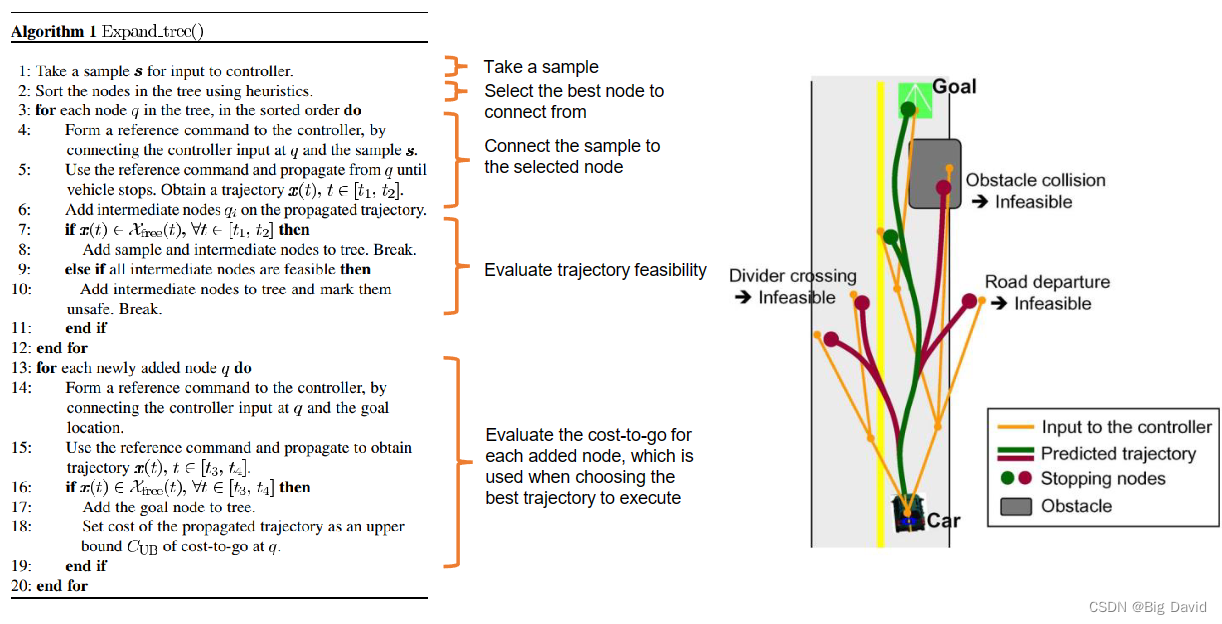
(1)相比于对车辆输入进行采样的标准的RRT,CL-RRT对控制器的输入进行采样
(2)通过前向模拟得到动态可行轨迹
(3)对于城市场景,优化算法策略:采样策略、节点选择策略
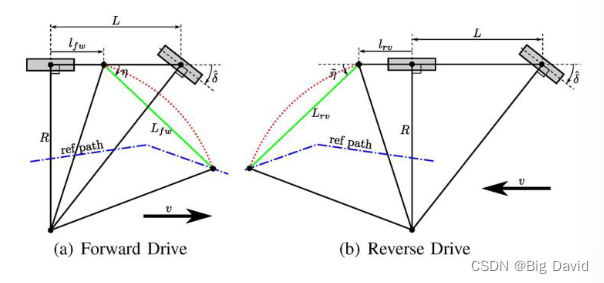
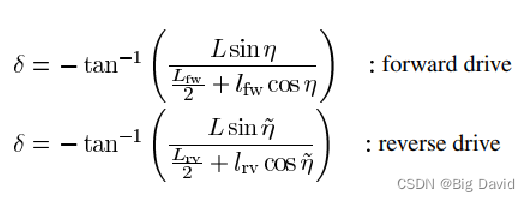
转向控制器:Pure-Pursuit Controller
速度控制器:PI Controller

采样策略:

n r 、 n θ n_r、n_\theta nr、nθ:具有高斯分布的随机变量
σ r \sigma_r σr:径向标准差
σ θ \sigma_\theta σθ:圆周方向标准差
根据车辆位置和道路规则改变这些参数
Node选择策略:
(1)RRT试图将样本连接到树中最近的节点,当RRT应用于转弯能力有限的车辆时,需要进行拓展
(2)CL-RRT算法使用节点和采样点之间的Dubins路径长度作为距离度量
Reeds-Shepp曲线和Dubins曲线
这篇关于基于采样的自动驾驶规划算法 - PRM,RRT,RRT*,CL-RRT的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









