rqt专题

ROS2入门21讲__第20讲__RQT:模块化可视化工具
目录 前言 rqt介绍 日志显示 图像显示 发布话题数据/调用服务请求 绘制数据曲线 数据包管理 节点可视化 前言 ROS中的Rviz功能已经很强大了,不过有些场景下,我们可能更需要一些简单的模块化的可视化工具,比如只显示一个摄像头的图像,使用Rviz的话,难免会觉得操作有点麻烦。 此时,我们就会用到ROS提供的另外一种模块化可视化工具——rqt。 rqt介绍 正如R

机器人操作系统ROS Indigo 入门学习(9)——理解ROS rqt_console和 roslaunch
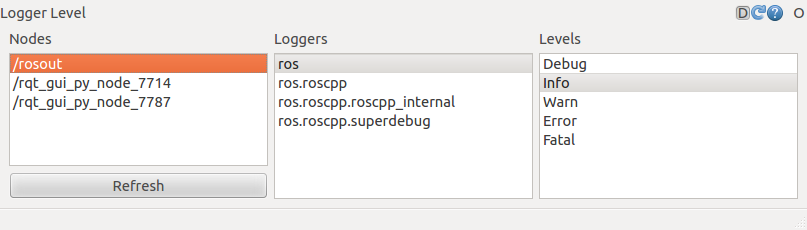
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS fuerte或者更早的版本,rqt不是十分完善,请查看这篇文章使用基于old rxthis page. 1.1前提rqt和tuetlesim package 需要用到rqt和tuetle
ROS总结—— rqt_console 和 roslaunch
使用 rqt_console 和 roslaunch 本博客是对http://wiki.ros.org/上ROS教程的学习总结,欢迎大家交流学习。本节讲解如何使用rqt_console和rqt_logger_level进行调试,以及如何使用roslaunch同时运行多个节点。早期版本中的rqt工具并不完善,如果你使用的是“ROS fuerte”或更早期的版本,请同时参考学习使用老版本的“rx”工

番外篇 百分百解决XML Document ‘/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml‘ has no Root Element.报错
出现的问题 在使用rqt工具时,报错如图所示: [ERROR] [1627898425.729156095]: Skipped loading plugin with error: XML Document '/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml' has no Root Element. This likely means t

rqt播放bag包时某些topic播放失败----解决思路
在使用rqt播放bag包时,有时会出现某些topic无法播放的情况。 报错现象是UnicodeDecodeError: 'ascii' codec can't decode byte 0xe6 in position 1905等相关类型的错误。 原因是由于自定义消息中的string类型变量编码格式为UTF-8格式编码,解码为ASCII码时会报错。 解决思路是,打开/opt/ros/jade/

rviz似乎是显示的你选择的话题消息,就像rqt_image_view一样,把你选择的topic以图形化的方式展现出来。
rviz似乎是显示的你选择的话题消息,就像rqt_image_view一样,把你选择的topic以图形化的方式展现出来。 这样就好理解了,所展现的图像都是有对应topic的。 所以你要看激光雷达的数据,就选择激光雷达的节点发布的topic进行展示就可以了。 rviz也可以像rqt_image_view一样订阅摄像头消息,显示出摄像头图像,那本质就是一样的了。 https:
在 Docker 中启动 ROS2 里的 rivz2 和 rqt 出现错误的解决方法
1. 出现错误: 运行 ros2 run rivz2 rivz2 ,报错如下 : No protocol specifiedqt.qpa.xcb: could not connect to display :1qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "" even though it was found
rqt查看rosbag中视频的方法
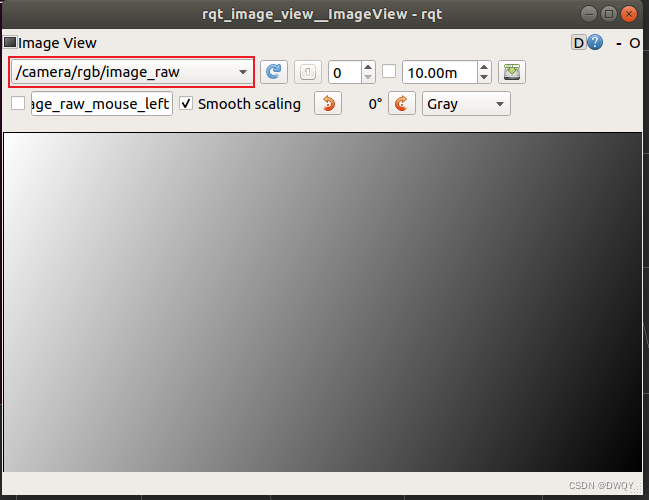
1. 播放bag视频 执行: rosbag play xxx.bag 2. 打开rqt_image_view 执行: rqt_image_view 3. 在选择话题处选择图片话题

ROS使用过程中出现的问题:由于Anaconda的Python路径问题造成rqt_graph报错
问题如下: Could not import "pyqt" bindings of qt_gui_cpp library - so C++ plugins will not be available: ModuleNotFoundError: No module named 'libqt_gui_cpp_sip'解决方案:
rviz似乎是显示的你选择的话题消息,就像rqt_image_view一样,把你选择的topic以图形化的方式展现出来。
rviz似乎是显示的你选择的话题消息,就像rqt_image_view一样,把你选择的topic以图形化的方式展现出来。 这样就好理解了,所展现的图像都是有对应topic的。 所以你要看激光雷达的数据,就选择激光雷达的节点发布的topic进行展示就可以了。 rviz也可以像rqt_image_view一样订阅摄像头消息,显示出摄像头图像,那本质就是一样的了。 https:

可以打印看下图像消息的具体信息,里面应该包含分辨率等等的,不一定是都用rqt_image_view查看,这个只能看到图像其他看不到。
可以打印看下图像消息的具体信息,里面应该包含分辨率等等的,不一定是都用rqt_image_view查看,这个只能看到图像其他看不到。 包括我们改分辨率看分辨率真正有没有改过来也可以从这看嘛。当然终端也会打印分辨率,只是我们这么看可以更为本质地分析。 下面拍自《ROS机器人开发实践》
可以打印看下图像消息的具体信息,里面应该包含分辨率等等的,不一定是都用rqt_image_view查看,这个只能看到图像其他看不到。
可以打印看下图像消息的具体信息,里面应该包含分辨率等等的,不一定是都用rqt_image_view查看,这个只能看到图像其他看不到。 包括我们改分辨率看分辨率真正有没有改过来也可以从这看嘛。当然终端也会打印分辨率,只是我们这么看可以更为本质地分析。 下面拍自《ROS机器人开发实践》
ROS学习系列笔记(一):Topic发布自定义msg数据及其rqt_plot可视化显示
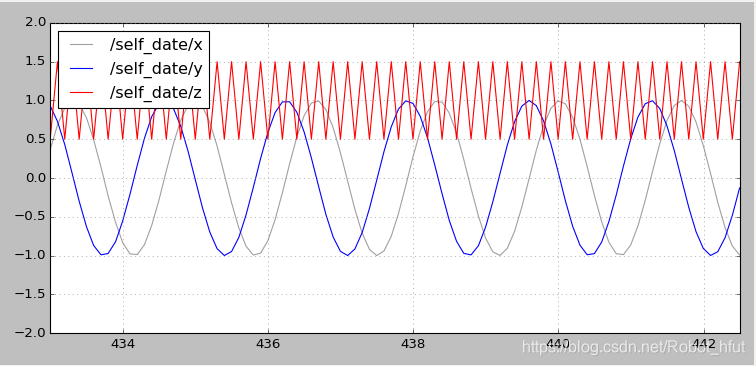
代码包下载链接:https://github.com/yongzcong/communication_learn.git 内容:假设发布的数据包括三个值 x , y , z x,y,z x,y,z,首先定义msg数据格式;其次新建发布节点publisher,发布msg格式的数据;然后新建节点listener,订阅发布消息;最后,在rqt_plot中订阅发布的数据并可视化显示。 1、msg格式数据

rqt_graph提示b‘Format: “dot“ not recognized. Use one of:\n‘
在终端运行roscore,分别运行rosrun turtlesim turtle和rosrun turtlesim turtle_teleop_key,再输入rqt_graph,提示如下错误 "dot" with args ['-Tdot', '/tmp/tmp145cvdav'] returned code: 1 stdout, stderr: b'' b'Format: "dot" no