本文主要是介绍ROS学习系列笔记(一):Topic发布自定义msg数据及其rqt_plot可视化显示,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
代码包下载链接:https://github.com/yongzcong/communication_learn.git
内容:假设发布的数据包括三个值 x , y , z x,y,z x,y,z,首先定义msg数据格式;其次新建发布节点publisher,发布msg格式的数据;然后新建节点listener,订阅发布消息;最后,在rqt_plot中订阅发布的数据并可视化显示。
1、msg格式数据与编译文件
1.1 定义数据结构
进入工作空间:
/catkin_ws/src/note/
在note/msg建立文件类型文件test.msg
写入消息的类型:
float64 x
float64 y
float64 z
注意:msg的文件名,后面的cpp文件均需包含此文件。
1.2 CMakeLists.txt文件
cmake_minimum_required(VERSION 2.8.3)
project(note)find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generationgeometry_msgs
)add_message_files(FILES test.msg)
generate_messages(DEPENDENCIES std_msgs)catkin_package(
# INCLUDE_DIRS include
# LIBRARIES learning_communicationCATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)include_directories(include${catkin_INCLUDE_DIRS}
)add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker ${PROJECT_NAME}_generate_messages_cpp)add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp)
1.3 package.xml文件
<?xml version="1.0"?>
<package format="2"><name>note</name><version>0.0.0</version><description>The note package</description><maintainer email="hcx@todo.todo">hcx</maintainer><license>TODO</license><buildtool_depend>catkin</buildtool_depend><build_depend>roscpp</build_depend><build_depend>rospy</build_depend><build_depend>std_msgs</build_depend><build_depend>message_generation</build_depend><build_export_depend>roscpp</build_export_depend><build_export_depend>rospy</build_export_depend><build_export_depend>std_msgs</build_export_depend><exec_depend>roscpp</exec_depend><exec_depend>rospy</exec_depend><exec_depend>std_msgs</exec_depend><exec_depend>message_runtime</exec_depend> <export></export>
</package>
2. 定义发布节点
2.1 创建发布节点
进入工作空间:
/catkin_ws/src/note/
在note/src建立发布cpp文件talker.cpp
给出代码:
/*** 该例程将发布self_date话题,消息类型float64
*/
#include "ros/ros.h"
#include <math.h>
#include "note/test.h"int main(int argc, char **argv)
{// ROS节点初始化ros::init(argc, argv, "shiyan_talker");// 创建节点句柄ros::NodeHandle n;// 创建一个Publisher,发布名为self_date的topic,消息类型为std_msgs::float32ros::Publisher self_pub = n.advertise<note::test>("self_date", 1000);int pi = 3.1415926;// 设置循环的频率ros::Rate loop_rate(10);int count = 0;while (ros::ok()){// 初始化std_msgs::float32类型的消息note::test self_msg;self_msg.x = sin(pi*count/16);self_msg.y = cos(pi*count/16);self_msg.z = 1 + (pow(-1,count)/2);// 发布消息ROS_INFO("%.5f %.5f %.5f",self_msg.x,self_msg.y,self_msg.z);self_pub.publish(self_msg);// 循环等待回调函数ros::spinOnce();// 按照循环频率延时loop_rate.sleep();++count;}return 0;
}
2.2 发布节点程序解释
下面详细解释代码:
- 头文件
#include "ros/ros.h"
#include <math.h>
#include "note/test.h"
此为头文件,ros/ros.h是ros的头文件;math.h是数学功能头文件,因为后面用到三角函数;note/test.h是数据格式包含。
2. ros节点初始化与创建节点句柄
ros::init(argc, argv, "shiyan_talker");ros::NodeHandle n;
- 创建发布
ros::Publisher self_pub = n.advertise<note::test>("self_date", 1000);
创建一个Publisher,发布名为self_date的topic,消息类型为float64。其中,self_pub是名称,note::test指定数据类型;self_date是话题名;1000是发布序列的大小,这个影响不大,取1000就行了。
注意话题名,订阅消息需要指定发布者节点名。
4. 数据赋值
note::test self_msg;
self_msg.x = sin(pi*count/16);
self_msg.x = sin(pi*count/16);
self_msg.z = 1 + (pow(-1,count)/2);
self_msg是定义的test类型的数据结构,其中有float64 x,float64 y,float64 z,分别赋值给定。
5. 消息发布
ROS_INFO("%.5f %.5f %.5f",self_msg.x,self_msg.y,self_msg.z);
self_pub.publish(self_msg);
通过self_pub将test类型的数据结构self_msg发布出去。
2.3 发布节点运行结果
3、如何订阅自己的msg数据
3.1 定义发布节点
进入工作空间:
/catkin_ws/src/note/
在note/src建立订阅cpp文件listener.cpp
给出代码:
#include "ros/ros.h"
#include "note/test.h"void chatterCallback(const note::test::ConstPtr& msg)
{ROS_INFO("%f %f %f",msg->x,msg->y,msg->z);
}int main(int argc, char **argv)
{ros::init(argc, argv, "shiyan_listener");ros::NodeHandle n;ros::Subscriber sub = n.subscribe("self_date", 1000, chatterCallback);ros::spin();return 0;
}
3.2 发布节点程序解释
下面详细解释代码:
- 头文件
#include "ros/ros.h"
#include "note/test.h"
此为头文件,ros/ros.h是ros的头文件;note/test.h是数据格式包含。
2. ros节点初始化与创建节点句柄
ros::init(argc, argv, "shiyan_listener");ros::NodeHandle n;
- 创建订阅
ros::Subscriber sub = n.subscribe("self_date", 1000, chatterCallback);
创建一个Subscriber,订阅名为sub。其中,self_date是订阅的话题名(与发布的话题名对应),chatterCallback是回调函数;1000是接收序列的大小,这个影响不大,与发布者保持一致就好。
4. 回调函数
void chatterCallback(const note::test::ConstPtr& msg)
{ROS_INFO("%f %f %f",msg->x,msg->y,msg->z);
}
chatterCallback是回调函数名,note::test::ConstPtr指定msg的数据类型,然后将订阅的消息打印出来。
3.3 发布节点运行结果
4、如何可视化自己发布的msg数据
新打开终端,首先对工作空间source,否则会出错,找不到话题。
source ~/catkin_ws2/devel/setup.bash
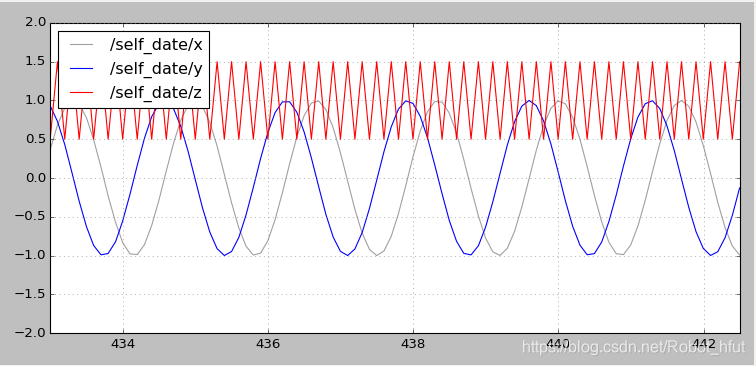
rosrun rqt_plot rqt_plot
输入话题名self_date即可将订阅的数据通过曲线表示出来。
注:点与点之间通过直线连接,因此self_date.c会以近似三角波的形式呈现,self_date.c本身是上下震荡的点。
这篇关于ROS学习系列笔记(一):Topic发布自定义msg数据及其rqt_plot可视化显示的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




