msg专题

code: 400, msg: Required request body is missing 错误解决
引起这个错误的原因是,请求参数按照get方式给。 应该给json字符串才对 补充: 1. @RequestBody String resource 加@RequestBody必须给json字符串,否则会报错400,记如标题错误。 不加这个的进行请求的话,其实post和get就没有什么区别了。 2. List<String> indexCodes=(List<String>)json.

MQTT协议中信息长度MSG len字段分析
截图自: 主要是说数据字节长度的计算: 每个字节由1个持续位和7个数据位组成:如果持续位为1,表示接下来的一个字节仍然表示长度的一部分 7个数据位表示的数据 0-127 共计128个数字 所以如上图的表格所示 1个字节,2个字节,3个字节,4个字节的数据范围 切记:MQTT长度的表示范围 最多使用4个字节 故这里存在着数据长度的限制 (不过真心牛掰! 试试Q

区块链 以太坊 多层调用,获取调用者 msg.sender
msg.sender:合约的直接调用者。 由于是直接调用者,所以当处于 用户A->合约1->合约2 调用链下, 若在合约2内使用msg.sender,得到的会是合约1的地址。如果想获取用户A,可以用tx.origin, tx.origin:交易的"始作俑者",整个调用链的起点。 pragma solidity ^0.4.25;contract Sample{//Stat
【ros2】geometry_msgs::msg::TransformStamped 数据类型详解
geometry_msgs::msg::TransformStamped 数据类型详解 1. 数据类型定义 geometry_msgs::msg::TransformStamped 是 ROS 2 中的一个消息类型,用于表示一个时间戳和坐标变换信息。 2. 结构 geometry_msgs::msg::TransformStamped 包含以下字段: struct TransformSt
【ros2】 const builtin_interfaces::msg::Time timestamp解析
解析 const builtin_interfaces::msg::Time & timestamp 1. 数据类型 builtin_interfaces::msg::Time 是 ROS 2 中的一个消息类型,用于表示时间戳。 2. 结构 builtin_interfaces::msg::Time 包含以下字段: struct Time{std::uint32_t sec;std::

创建ROS msg和srv
1.关于msg和srv msg: msg files are simple text files that describe the fields of a ROS message. They are used to generate source code for messages in different languages. srv: an srv file descri

Linux configure.ac:51: error: possibly undefined macro: AC_MSG_ERROR
bug: 解决方法: cd /usr/local/share/autoconf/autoconf cp *.m4 /usr/share/aclocal
利用msg生成头文件时,ROS编译报错:XXX/XXX.h: No such file or directory
问题:ROS中利用msg文件自动生成头文件未成功,编译报错 我是想让头文件生成在/devel/include里面(可以根据自己的需求改,但是CMakeList.txt和package.xml里面的配置一定要对应) 一、CMakeLists.txt关键配置 1.指定消息文件文件名与自己的文件对应 # 指定消息文件add_message_files(FILESgps_data.msg)
X-MSG-IM-频道状态服务-基本实现思路
本文描述了X-MSG-IM中频道状态服务的基本实现思路 状态服务是其于sub/pub的, 在设计上支持一切有需要被订阅的频道, 核心api只有三个: 订阅 取消 查询 下面分别展示standalone, cluster-域内, cluster-跨域三种部署环境下的频道状态订阅流程. 涉及到的系统网元: x-msg-ap, 访问点 x-msg-im-hlr, 个体频道归属位
Android 安装过程四 MSG_INSTALL消息的处理 安装之前的验证
由Android 安装过程三文章知道,MSG_INSTALL消息的处理是调用的handleInstall(),看一下它的主要相关代码: private void handleInstall() {…………if (params.isStaged) {mStagingManager.commitSession(mStagedSession);// TODO(b/136257624): C
【ros】2.ros的xx.msg编译
ros的使用: mkdir rosworkspacecd rosworkspacemkdir srccd srccatkin_init_workspace # 会在src/生成CMakeLists.txtcd .. # 退回到ros工作空间catkin_make # 会在rosworkspace生成devel和build文件夹,build是编译的中间文件,不用管。注


Android Handler机制 (一个Thead中可以建立多个Hander,通过msg.target保证MessageQueue中的每个msg交由发送message的handler进行处理 ,但是
在android中提供了一种异步回调机制Handler,使用它,我们可以在完成一个很长时间的任务后做出相应的通知 handler基本使用: 在主线程中,使用handler很简单,new一个Handler对象实现其handleMessage方法,在handleMessage中 提供收到消息后相应的处理方法即可,这里不对handler使用进行详细说明,在看本博文前,读者

C++入门 ros自定义msg话题通信
一、 开发环境 ubuntu20.04 ros版本noetic 参考视频 https://www.bilibili.com/video/BV1Ci4y1L7ZZ/?p=52&spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=4cd1b6f268e2a29a11bea5d2568836ee 二、 编
机器人操作系统ROS Indigo 入门学习(11)——创建一个ROS msg和srv
这篇教程将涉及怎样创建和编译msg和srv文件,以及怎样使用命令行工具rosmsg,rossrv 和roscp. 1.1介绍msg和srv msg:msg文件是描叙ROS message字段的简单文本文件.它们用来为messsage产生不同程序语言的源代码. Srv:一个srv文件描叙了一种服务.它由两部分组成:一个请求和一个响应. msg文件储存在一个package的msg目录,
理解Solidity 中的 tx.origin 和 msg.sender
开发者需要了解在Solidity中tx.origin和msg.sender的区别。这两个全局变量经常被混淆,尽管它们之间有着根本的不同。虽然乍一看它们可能相似,但在交易的上下文中,tx.origin和msg.sender代表不同的地址。在这篇博客文章中,我们将深入探讨这些变量的含义。 什么是tx.origin? 在Solidity中,tx.origin标识交易的原始发送者。它指向发起交易的外部
解决了这个报错User{code: 0, msg: ‘params pid Missing‘, time: ‘1715421706‘, data: null}
这个报错的意思是参数 pid 缺失。在你的代码中,有一个请求或操作需要传递参数 pid,但是没有正确传递或设置这个参数,导致系统无法识别或处理这个请求。 要解决这个问题,你可以检查代码中是否有包含需要传递 pid 参数的请求或操作,并确保在调用这个请求或操作时正确设置了参数 pid。如果需要 pid 参数,你可以根据具体情况传递正确的值给它,以解决这个报错。 解决方法: $.ajax({u

OpenHarmony usb打开报错“usb fail error code = -3, error msg = LIBUSB_ERROR_ACCESS”
一、前言:最近公司项目需求,定位要求使用国产系统,国产系统无非就是 统信os ,麒麟OS, 还有这两年比较热的 OpenHarmony。于是,老板要求公司产品适配OpenHarmony , 跟上时代步伐。 二、在开发中使用 usb 通讯时,遇到 权限不足,一直报错。 “usb fail error code = -3, error msg = LIBUSB_ERROR_ACCESS”
Android 安装过程三 MSG_ON_SESSION_SEALED、MSG_STREAM_VALIDATE_AND_COMMIT的处理
Android 安装过程一 界面跳转 知道,在InstallInstalling Activity中,PackageInstallerSession对象创建之后,接着会打开它,然后将安装文件进行拷贝,拷贝完成之后,会对Session对象确认。 从Session对象确认往下看,Session对象在安装进程中对应是PackageInstaller.Session对象。它最终会进入系统进程调用到
小程序中Java后台调用getAccessToken接口、msg_sec_check接口检测文本安全、小程序前端访问后端接口的方法
序言:书接上回 小程序中Java后台调用接口(getAccessToken)获取调用凭据,调用接口(msgSecCheck)检测文本内容是否安全–最终版 小程序服务端后台 Java代码编写,框架采用SSM架构搭建 第一步:添加需要的pom.xml依赖配置 <!-- 小程序文本安全检测接口所需的依赖 --><dependency><groupId>org.apache.httpcompon
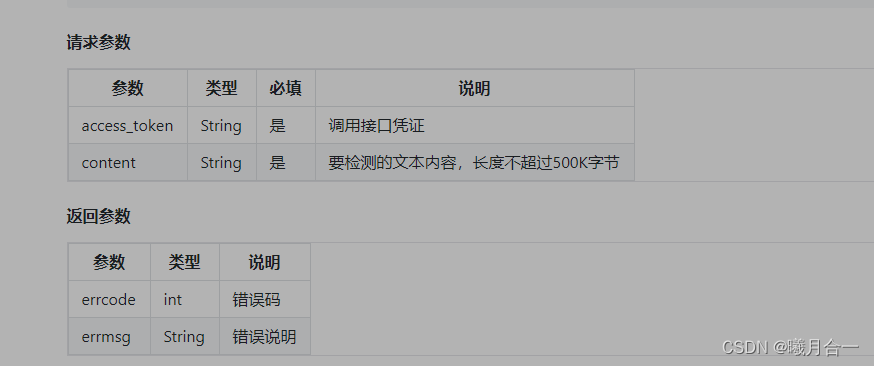
小程序中使用HTTPS调用自带文本安全内容检测接口(msg_sec_check)的实现方法
在小程序中调用自带的文本安全内容检测接口,你需要使用小程序提供的wx.request方法。以下是一个示例代码: javascript代码: // 假设你已经获取了access_token,如果不知道如何获取,可以参考我上一篇文章const access_token = '你的access_token';// 需要检测的文本const content = '需要检测的文本内容';// 构造请
TeamTalk源码分析之msg_server
消息服务器支持TCP长连接和HTTP长轮询两种接入方式,本节主要讲SOCKET的轮训,先看如下几个函数。 void CMsgConn::OnConnect(net_handle_thandle) { m_handle = handle; m_login_time = get_tick_count(); g_msg_conn_map.insert(make_p
TeamTalk源码分析之http_msg_server对外提供API
原文:www.bluefoxah.org/teamtalk/provide_api.html 1、如何提供一个接口 作为一个完整的平台,对外提供API是必不可少的,TT第二版跟第一版一个比较明显的变化,就是相比第一版多了一个http_msg_server这个模块,虽然这个模块暂时没有提供太多的功能,但是却也提供了一个参考。不过还是有很多朋友在群里咨询询问如果利用http_ms

ROS 2边学边练(16)-- 自定义msg和srv文件
前言 在前面的文章我们在学习主题(topic)和服务(service)通信方法时,使用的一直是ROS 2提供好的消息结构文件(xxx.msg)和服务结构文件(xxx.srv),稀里糊涂的就这样过去了,如果我们有个需求,ROS 2提供的msg和srv无法满足,那我们就得定义自己结构的msg和srv文件了。 动动手 创建一个功能包 .msg和.srv文件需要分别
Ros问题解决(一)创建msg和srv过程中message_runtime的问题
参考:https://blog.csdn.net/weixin_40712763/article/details/78905454 在创建msg和srv文件之后,使用srv和msg文件时候需要对xml文件进行修改,如下: 需要对package.xml文件添加/取消注释以下命令行 <build_depend>message_generation</build_depend><run_depe
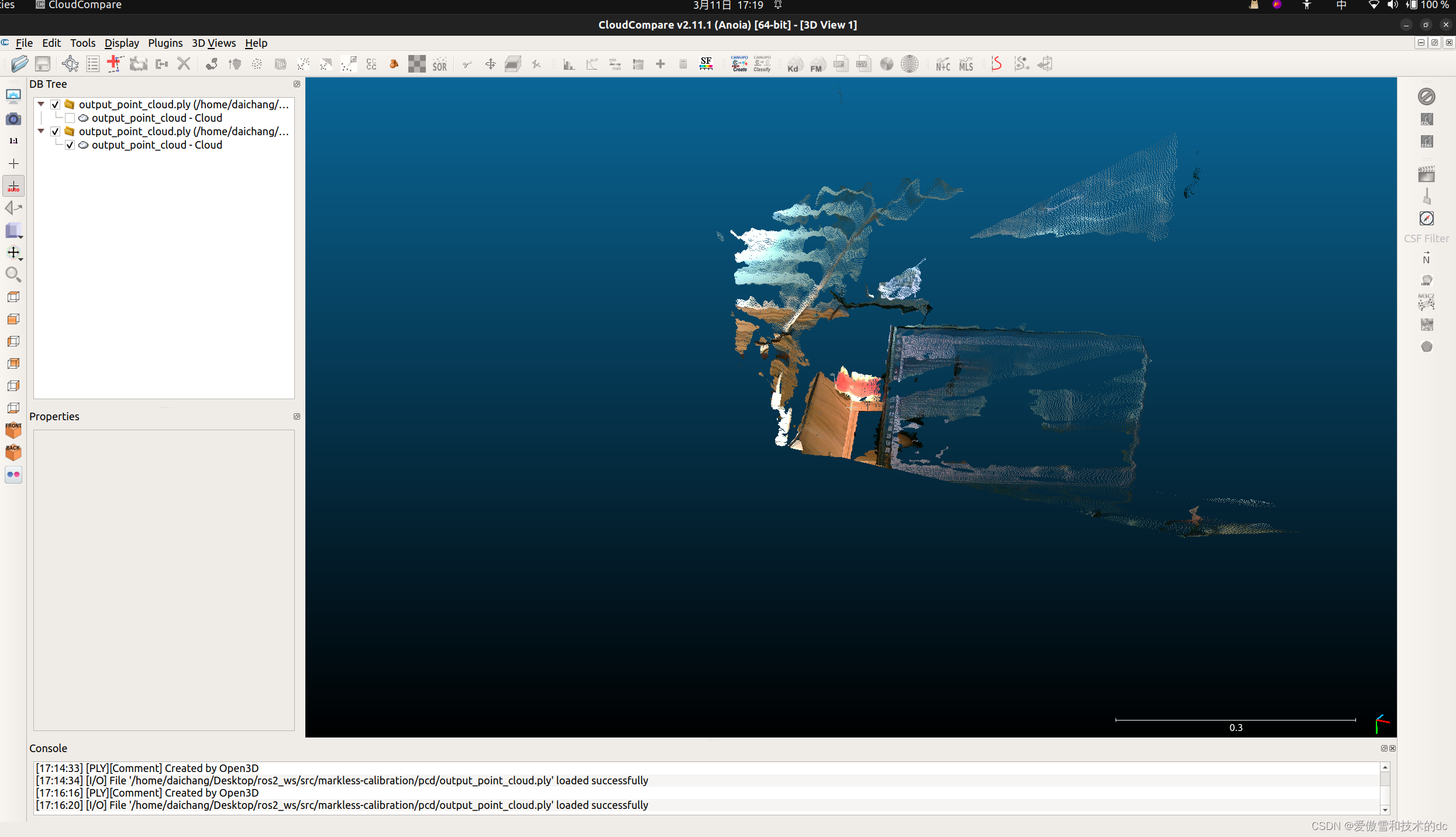
ros2 订阅 sensor_msgs/msg/PointCloud2
1.消息结构 daichang@daichang-ASUS:~/Desktop/ros2_ws$ ros2 interface show sensor_msgs/msg/PointCloud2# This message holds a collection of N-dimensional points, which may# contain additional information