本文主要是介绍ROS总结—— rqt_console 和 roslaunch,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
使用 rqt_console 和 roslaunch
本博客是对http://wiki.ros.org/上ROS教程的学习总结,欢迎大家交流学习。本节讲解如何使用rqt_console和rqt_logger_level进行调试,以及如何使用roslaunch同时运行多个节点。早期版本中的rqt工具并不完善,如果你使用的是“ROS fuerte”或更早期的版本,请同时参考学习使用老版本的“rx”工具。
1. 预先安装rqt和turtlesim程序包
会用到rqt 和 turtlesim这两个程序包,请先安装:
$ sudo apt-get install ros-indigo-rqt ros-indigo-rqt-common-plugins ros-indigo-turtlesim2.使用rqt_console和rqt_logger_level
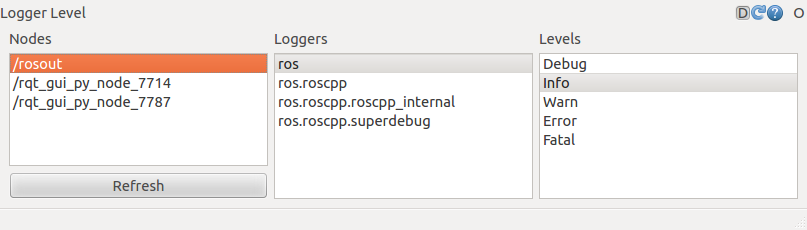
rqt_console属于ROS日志框架(logging framework)的一部分,用来显示节点的输出信息。rqt_logger_level允许我们修改节点运行时输出信息的日志等级(logger levels)(包括 DEBUG、WARN、INFO和ERROR)。
先看一下turtlesim在rqt_console中的输出信息,同时在rqt_logger_level中修改日志等级。在启动turtlesim之前先在另外两个新终端中运行rqt_console和rqt_logger_level:
$ rosrun rqt_console rqt_console$ rosrun rqt_logger_level rqt_logger_level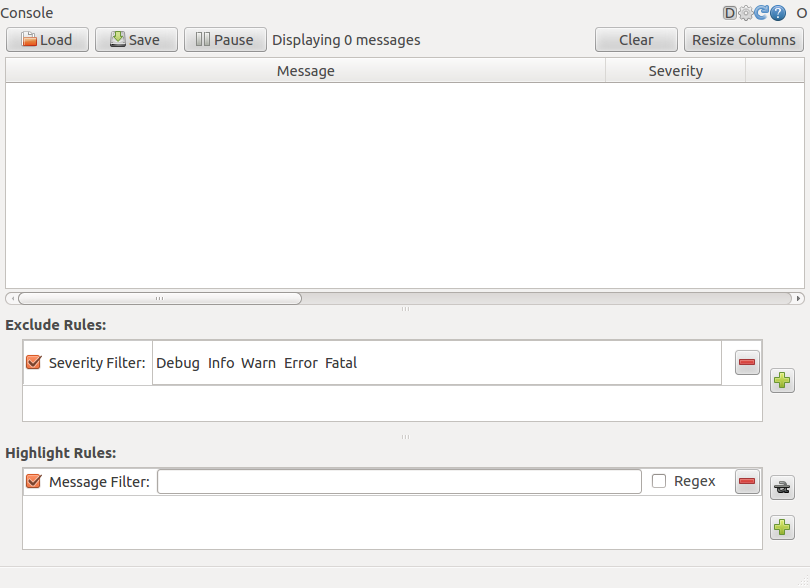
现在在一个新终端中启动turtlesim:
$ rosrun turtlesim turtlesim_no这篇关于ROS总结—— rqt_console 和 roslaunch的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





