roslaunch专题

机器人操作系统ROS Indigo 入门学习(9)——理解ROS rqt_console和 roslaunch
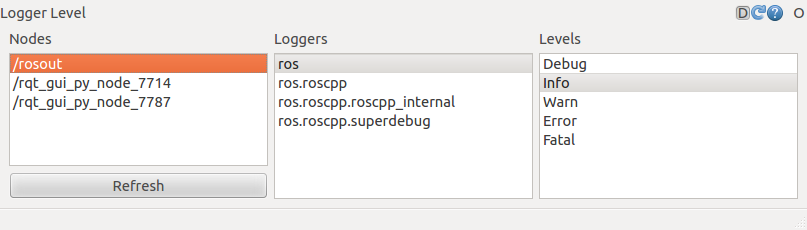
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS fuerte或者更早的版本,rqt不是十分完善,请查看这篇文章使用基于old rxthis page. 1.1前提rqt和tuetlesim package 需要用到rqt和tuetle
ROS总结—— rqt_console 和 roslaunch
使用 rqt_console 和 roslaunch 本博客是对http://wiki.ros.org/上ROS教程的学习总结,欢迎大家交流学习。本节讲解如何使用rqt_console和rqt_logger_level进行调试,以及如何使用roslaunch同时运行多个节点。早期版本中的rqt工具并不完善,如果你使用的是“ROS fuerte”或更早期的版本,请同时参考学习使用老版本的“rx”工

ROS安装问题: “Command ‘roscore‘ not found, but can be installed with: sudo apt install python-roslaunch“
ROS安装问题: "Command 'roscore' not found, but can be installed with: sudo apt install python-roslaunch" 前言问题描述解决方案 前言 VMware 15虚拟机,Ubuntu 18系统,安装 ROS melodic。安装结束之后,运行指令 “roscore”,弹出 “Command ‘

roslaunch 报错 numpy与python版本冲突
报错: File "/usr/lib/python3/dist-packages/numpy/core/__init__.py", line 17, in <module> from . import multiarray File "/usr/lib/python3/dist-packages/numpy/core/multiarray.py", line 14, in <module> fr
SLAM导航机器人零基础实战系列:(二)ROS入门——8.理解roslaunch在大型项目中的作用
SLAM导航机器人零基础实战系列:(二)ROS入门——8.理解roslaunch在大型项目中的作用 摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行
关于roslaunch,launch文件的编写个人总结
本质就是启动可执行文件嘛,之前理解了一个节点就是一个可执行文件,这个很重要。 rosrun就是直接启动一个可执行文件。 昨天最开始是看了这篇文档 https://blog.csdn.net/try_again_later/article/details/82933533 <node pkg="turtlesim" name="sim" type="turtlesim_node"

通过ROS开启Gazebo的世界(这篇写得不错,教会了我怎么自己建一个gazebo的功能包,建立世界模型,导入机器人模型,通过roslaunch启动,值得细读真正学会!)
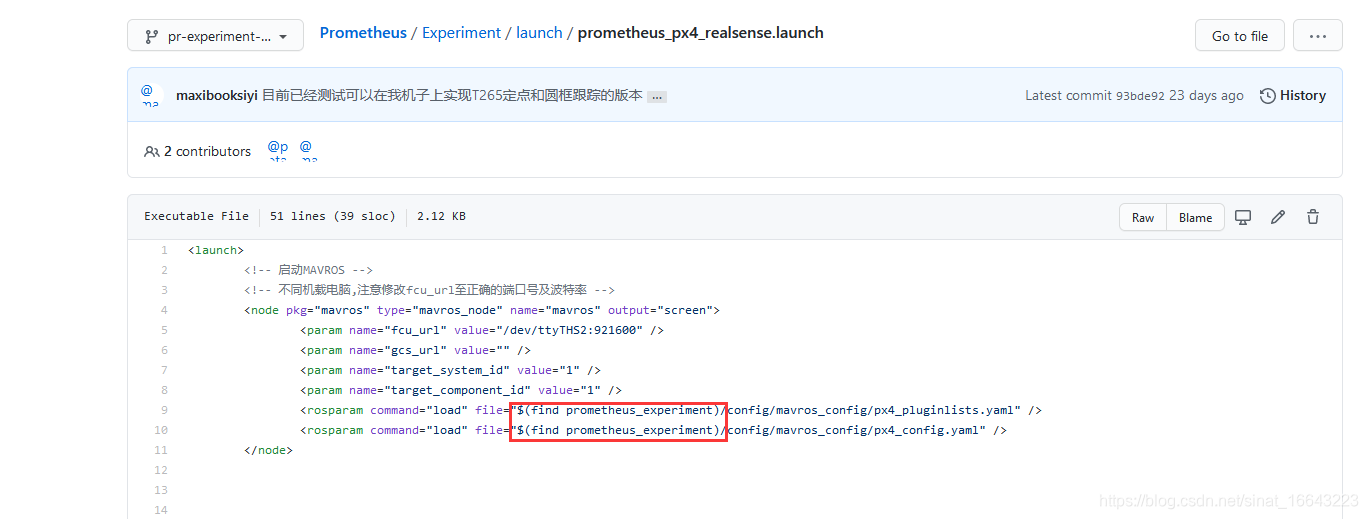
这篇写得不错,教会了我怎么自己建一个gazebo的功能包,建立世界模型,导入机器人模型,通过roslaunch启动,值得细读真正学会! 让我大体有点感觉了现在。 看来应该PX里面的仿真功能包应该包含了世界模型和无人机模型。所以XTDrone的下面红框内的操作应该就是把一些世界模型或者无人机模型拷贝到PX4的那个仿真功能包里面。 https://www.yuque.com/xtdrone

ROS报错:RLException:Invalid roslaunch XML Syntax: mismatched tag:
运行roslaunch文件提示: RLException:Invalid roslaunch XML Syntax: mismatched tag: line 45, column 2 The traceback for the exception was written to the log file. j 解决办法: line45 行多了标签:</node> 另外使用Ctrl+h可
ROS报错:RLException:Invalid roslaunch XML Syntax: mismatched tag:
运行roslaunch文件提示: RLException:Invalid roslaunch XML Syntax: mismatched tag: line 45, column 2 The traceback for the exception was written to the log file. j 解决办法: line45 行多了标签:</node> 另外使用Ctrl+h可
rosrun or roslaunch can't find package or ERROR: cannot launch node of type
在编译自己创建的ros包过程中,往往会出现roslaunch 或 rosrun找不到自己定义的package 原因是ros系统没有正确定位package的位置。 解决办法: 1.确定CMakeList中存在catkin_package语句,哪怕空参数也行: catkin_package() 2.确定launch文件是否正确 pkg名字是否和自定义的pkg名字一致? name是否和自定义的节点
RLException: Invalid roslaunch XML syntax: not well-formed (invalid token): line 1, column 0
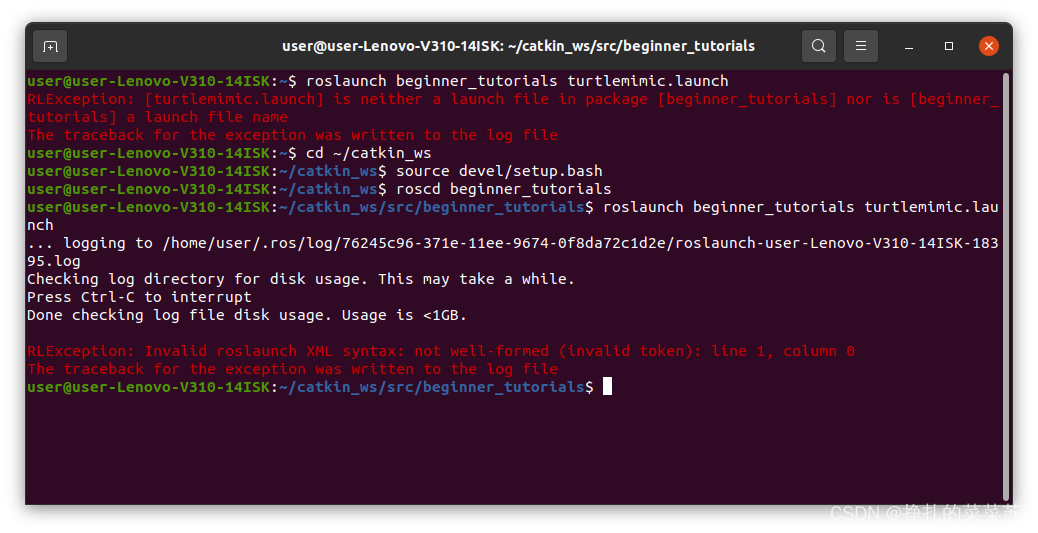
本文在进行launch文件时,报错如上 解决过程作如下记录 解决方法: 1.如果是line 1, column 0,说明文件没有保存成功,将launch文件关闭,保存后重新打开运行。 原因是本文作者在创建launch文件时,在终端打开文件后并没有写入,而是关闭去文件夹填写launch文件内容,导致出现问题。删除重新创建文件写入即可。 2.如果第一种解决方法解决不了,错误显示的不
roslaunch 失败原因
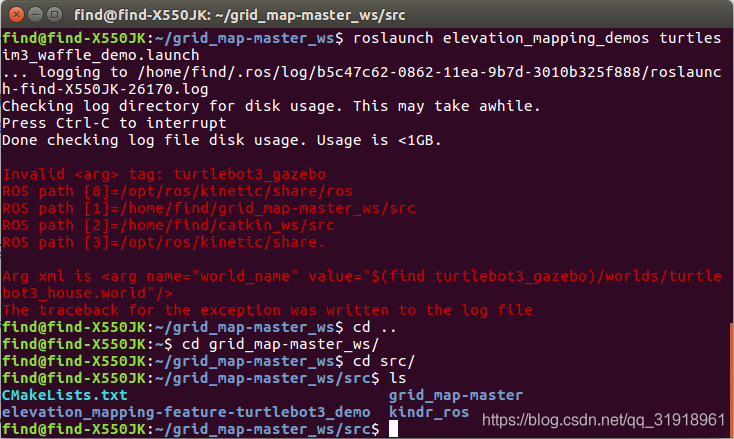
1. 没有source 在home的 ./bashrc文件的最后一行加上 source ~/自己的工作空间/devel/setup.bash 2.模型加载无效 Invalid <arg> tag: turtlebot3_gazebo ROS path [0]=/opt/ros/kinetic/share/ros ROS path [1]=/home/find/grid_map-maste

ROS安装问题: “Command ‘roscore‘ not found, but can be installed with: sudo apt install python-roslaunch“
ROS安装问题: "Command 'roscore' not found, but can be installed with: sudo apt install python-roslaunch" 一、遇到的问题二、解决办法1.检查目录2.通过上述方法依旧无法解决该问题---提供方法2 总结 一、遇到的问题 :~$ roscoreCommand 'roscore' not
在~Firmware下面用roslaunch 启动launch 报错 udp0: sendto:Invalid argument
在~Firmware下面用roslaunch 启动launch 报错,如下 $ roslaunch px4 mavros_posix_sitl.launch 报错[ERROR] [1658284290,546891096]:udp0: sendto:Invalid argument 找了很多博客都没有找到相应解决方式,自己也是小白就很一头雾水,偶然看到了一篇博客((1条消息) ud
roslaunch学习笔记
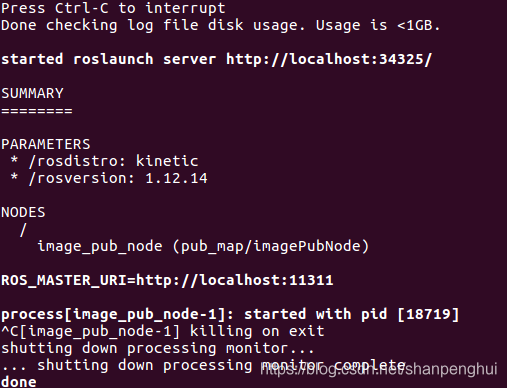
roslaunch 是ros中的一种运行方式 与rosrun的区别是能够将很多节点放在一起运行,ros的通信机制是节点发布数据到话题,其他节点从话题上订阅数据,所以开发者只要将节点的部分编写好,roslaunch文件的学习关键是记住launch语法中的关键字。 1.launch文件的运行 命令1:roslaunch “包名” “launch文件名.launch” 命令2:roslaunch “l