本文主要是介绍关于roslaunch,launch文件的编写个人总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本质就是启动可执行文件嘛,之前理解了一个节点就是一个可执行文件,这个很重要。
rosrun就是直接启动一个可执行文件。
昨天最开始是看了这篇文档
https://blog.csdn.net/try_again_later/article/details/82933533
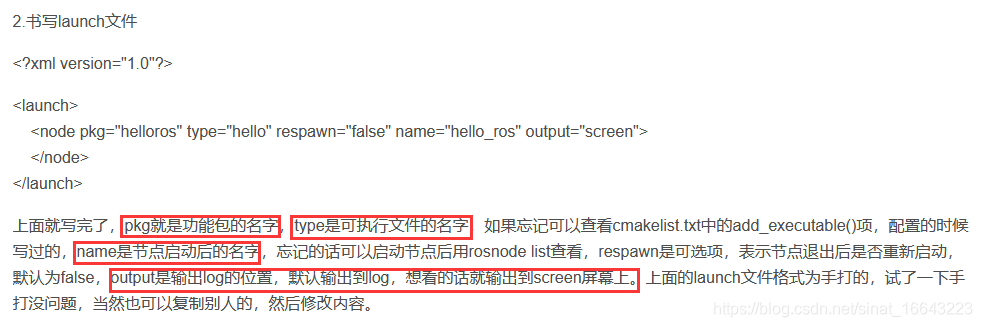
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>:节点的三个属性分别是程序包名字,节点名字,可执行文件名字。
type是可执行文件的名字。
https://blog.csdn.net/qq_34240459/article/details/104875261
https://www.cnblogs.com/flyinggod/p/10795694.html

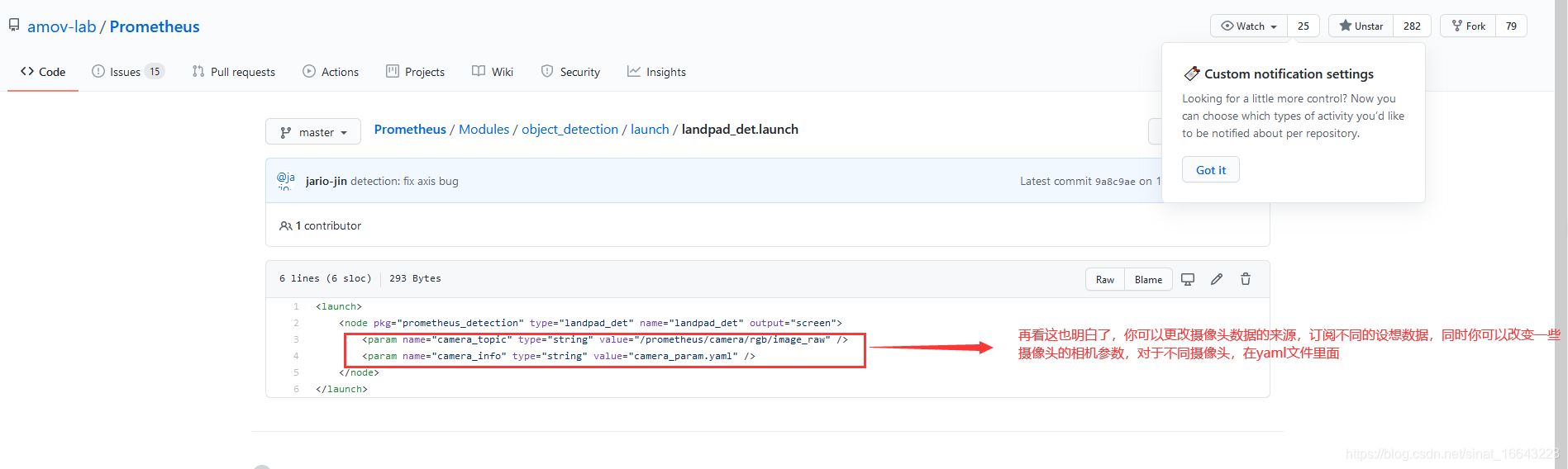
现在再看这个launch文件,每个节点的第一行你就看得懂了对不对。现在再把那些param name弄懂。
https://github.com/amov-lab/Prometheus/blob/master/Experiment/launch/prometheus_px4_realsense.launch
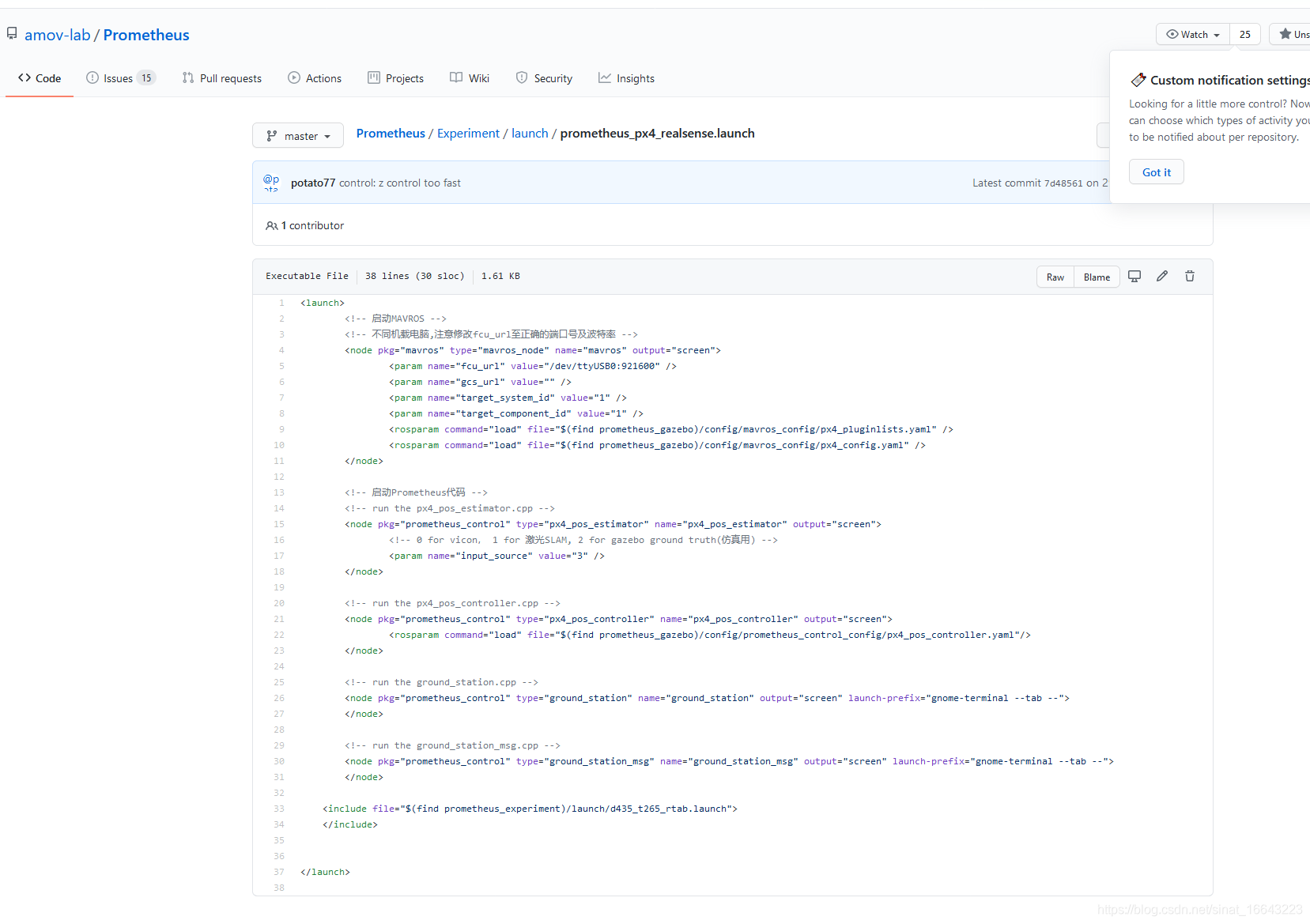
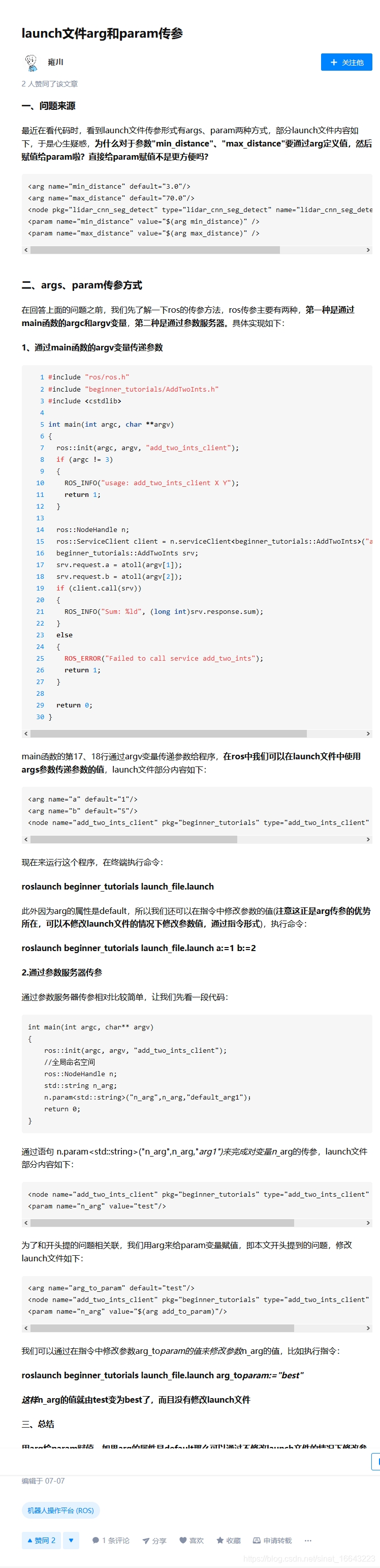
下面这个让我看懂了param和rosparam的区别
https://blog.csdn.net/weixin_45777375/article/details/109445591

但是我看这里param也可以用yaml文件,没有用rosparam
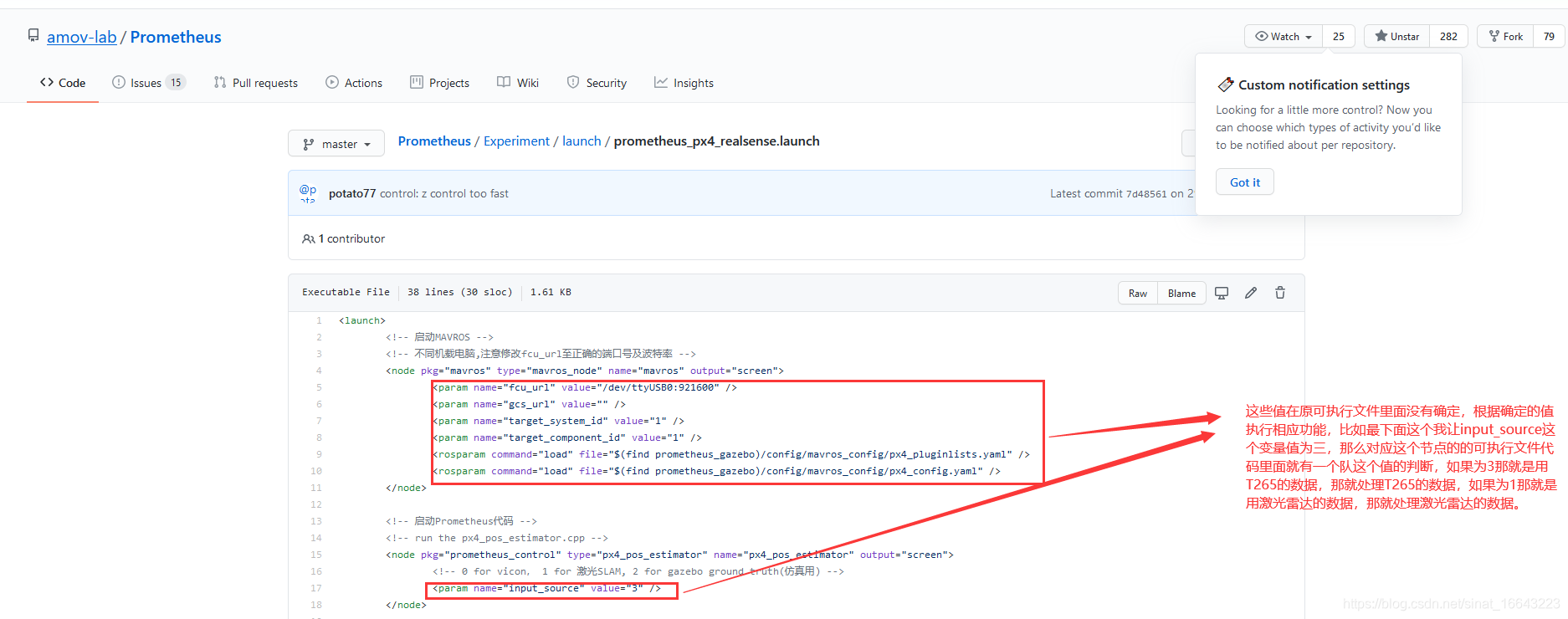
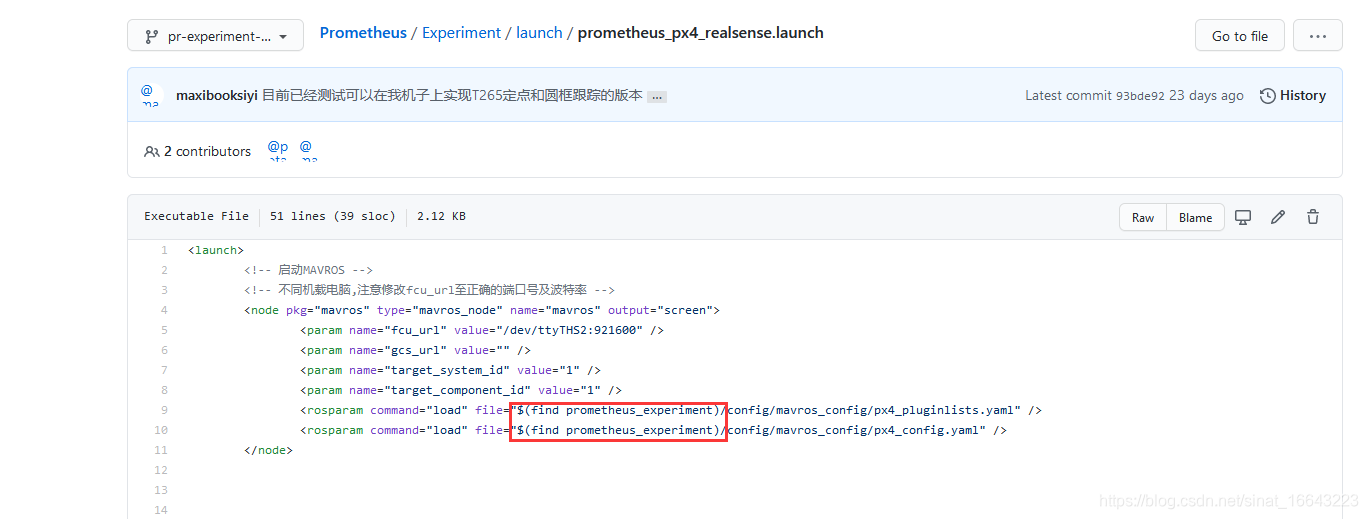
我现在大体明白了,param name就是给那个cpp文件里面的一些参数赋值,看了下面大体明白。最典型的你还是看
https://github.com/amov-lab/Prometheus/blob/master/Experiment/launch/prometheus_px4_realsense.launch
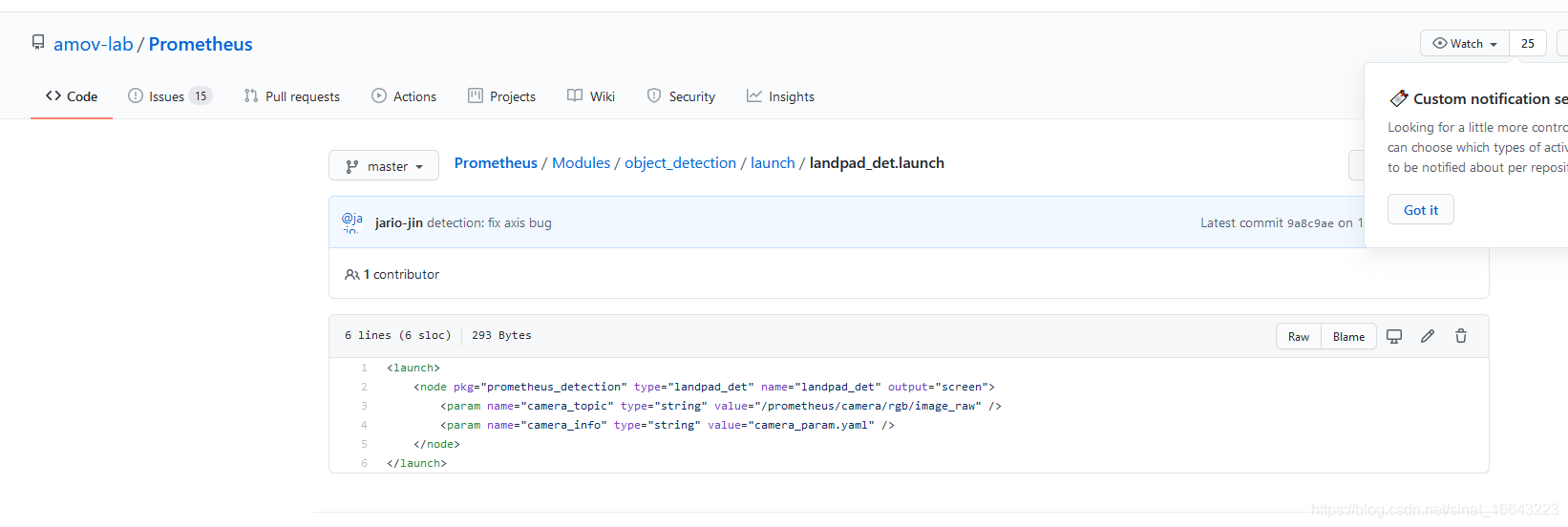
https://github.com/amov-lab/Prometheus/blob/master/Modules/object_detection/launch/landpad_det.launch
https://zhuanlan.zhihu.com/p/157526418
2021.1.10
我觉得roslaunch rosrun命令都要写包名,包名的作用应该就是一个路径,launch文件应该是在对应功能包的launch文件夹下,可执行文件应该是在对应功能包的一个专门的文件夹下,要写包名的本质我觉得就是提供一个路径,让系统能找到对应的launch文件或者可执行文件。所以写好的launch文件应该是不能乱放的。
这里面我应该写了我的第一个launch文件
https://blog.csdn.net/sinat_16643223/article/details/111055287

在Launch文件中include其他launch文件也需要注意,主要是路径,路径开头也是写的功能包,这也再一次体现出功能包实际当做路径。
可以见这篇文章
https://blog.csdn.net/sinat_16643223/article/details/112432038

我发现Launch文件里面加载yaml文件用的路径也是靠功能包。感觉ROS里面的路径就是功能包名,功能包名的作用就是起到替代路径。
这篇关于关于roslaunch,launch文件的编写个人总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






