launch专题

Pycharm安装报错:Cannot detect a launch configuration解决办法
《Pycharm安装报错:Cannotdetectalaunchconfiguration解决办法》本文主要介绍了Pycharm安装报错:Cannotdetectalaunchconfigur... 本文主要介绍了Pycharm安装报错:Cannot detect a launch configuratio

Android的Launch
看了一下资料,其实差别并不像一般的bootloader之类那么大。基本上还是和普通的APK程序差不多,基本上是AMS启动的第一个带界面的程序,这个界面也是常规的开发模式。可以设置各种view,可以设置背景。 然后在这个程序中,可以读取已安装的各种程序,然后自己做icon或者用程序原来的icon,将它们显示在界面上。当用户点击的时候,处理点击事件,打开程序。 从界面来说这个界面就是一个Grid

spark-shell启动报错:Yarn application has already ended! It might have been killed or unable to launch...
前半部分转自:https://www.cnblogs.com/tibit/p/7337045.html (后半原创) spark-shell不支持yarn cluster,以yarn client方式启动 spark-shell --master=yarn --deploy-mode=client 启动日志,错误信息如下 其中“Neither spark.yarn.ja

【ROS2】launch启动文件:高级
1、事件 1.1 简述 ROS2的Launch系统通过事件处理程序管理和监控用户定义的流程。 同时还负责监控流程状态并响应状态变化,这些变化称为事件。 ROS2 Launch系统中的事件,可以处理各种进程和节点状态变更,例如流程启动、IO操作、流程退出等。 注册事件处理程序,可以对这些事件进行响应。例如,当某个节点启动失败时,可以自动重启该节点或发送通知。这种能力使人们能够编写更为智能和自恢
【ROS2】launch启动文件:进阶
1、LaunchDescription详解 1.1 简述 Actions:动作(Actions)是 LaunchDescription 对象中的基本元素,也是ros2 launch文件中最主要的概念。 Actions表示了具体的启动操作。ROS 2 的 launch 系统提供了多种类型的动作,比如 Node(用于启动节点)、EnvironmentVariable(用于设置环境变量)、Param

Android Activity 的启动模式(Launch Mode)
1. 什么是 Activity 的启动模式? Activity 的启动模式决定了在启动一个 Activity 时,它在任务栈中的行为。任务栈(Task Stack)是一个先进后出的堆栈结构,管理着应用中的 Activity。通过配置启动模式,我们可以控制 Activity 在任务栈中的实例化和复用行为,从而优化用户体验和应用性能 2. 四种启动模式详解 standard
【ROS2】launch启动文件:基础
1、准备工作 ubuntu22.04系统对应ROS2版本为Humble 1)安装小乌龟 sudo apt install ros-humble-turtlesim 2)安装可视化工具rqt sudo apt install ros-humble-rqt sudo apt install ros-humble-rqt-graph 2、创建launch文件 1)创建单独存放launch的目
【Android】Navigation动态设置Graph和Launch参数
需求 Activity和Fragment可以服用,不同的启动方式,Fragment调用栈不同 方案 不同的启动方式,通过代码动态设置,使用不同的NavGraph 注意 动态设置代码是在onCreate之后执行的 NavHost如果指定了Graph,在onCreate后会立刻启动,可能会造成启动两个Fragment栈 所以使用动态Graph方案的话,在NavHost中不能设置app:n
ros launch的条件判断
launch输入参数条件判断 1. launch文件 camera.launch 根据输入参数arg1指定是否允许usb_cam节点,并设置对应的参数type <launch><arg name="arg1" default="true"/><group if="$(arg arg1)"><node name="usb_cam" pkg="usb_cam" type="usb_cam_node
ros --- c++和python 中 launch和yaml使用
1. Launch使用 ros单个工程的运行可以使用rosrun,但是做项目不可能只有一个或几个工程,当需要大量的工程配合运行时launch就应运而生了 关于launch的说明可以参考ROS入门之——浅谈launch 这里重点说明几点: launch文件需要放在某个package目录下,最好放在最主要的package目录下,醒目launch文件是可以跨包的,不要因为roslaunch test
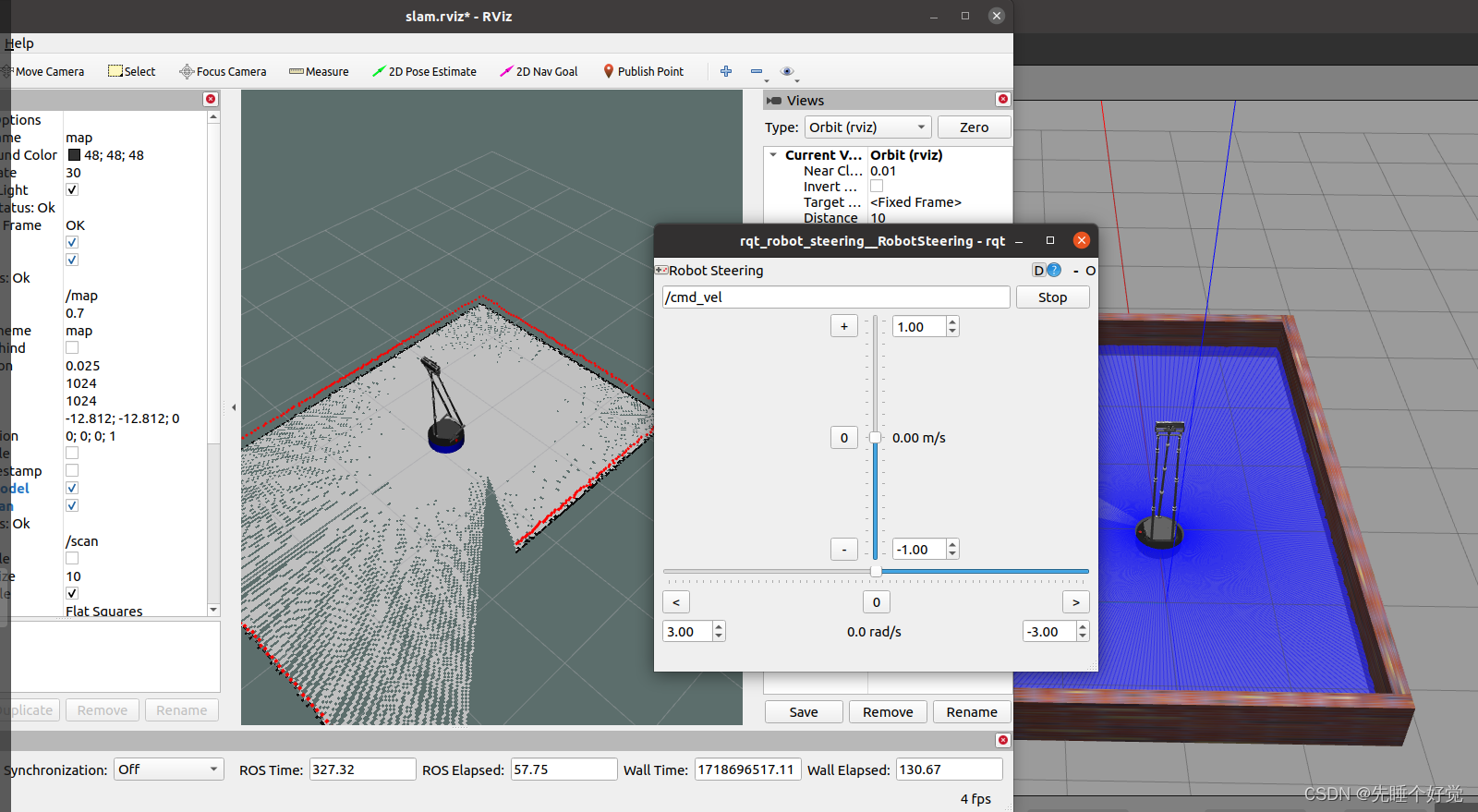
ROS学习记录:launch文件启动Hector_Mapping的建图功能
前言 SLAM软件包Hector_Mapping 在上一篇笔记中,通过Hector_Mapping软件包实现了SLAM功能,运行了四条指令,有些麻烦。本文通过launch文件的使用将指令整合起来,方便功能的实现。 一、打开终端,输入cd catkin_ws1/src/,进入工作空间的src目录。 二、输入catkin_create_pkg slam_pkg roscpp rospy st

goland 调试 could not launch process: decoding dwarf section info at offset 0x0: too short
Mac环境下,(其他环境类似) 1、错误信息: could not launch process: decoding dwarf section info at offset 0x0: too short 2、主要原因是: Mac环境下,go的版本比较新。 而goland使用的调试插件的版本低,导致的。 3、解决措施: 解决方案之一:对goland的调试插件进行升级。 3.1、下载、
Activity的Launch Mode的理解以及相对应的生命周期的运行
Activity的Launche Mode有四种: 1、SingleTop 2、 SingleTask 3、SingleInstance 4、Standard; 该模式的设置是在ManiFest文件的<Activity>的属性设置的。 接下来就分析各个的效果以及生命周期的运行情况
Android SplashActivity runs twice at launch on Android 13 API 33
运行写好的 Android App 到自己手机上(显示Xiaomi 23013RK75C Android 13 API 33), 通过 Logcat 发现第一次安装运行时启动页面的 onCreate 被调用两次,第一次 onCreate 函数中的 savedInstanceState 值为空,第二次不为空。 安卓官网发现应该是 Android 12 及以后的版本,制作启动页面需要调整,
ros2 launch 用法以及一些基础功能函数的示例
文章目录 launch启动一个节点的launch示例launch文件中添加节点的namespacelaunch文件中的话题名称映射launch文件中向节点内传入命令行参数launch文件中向节点内传入rosparam使用方法多节点启动命令行参数配置资源重映射ROS参数设置加载参数文件在launch文件中使用条件变量action的分组action的启动延时控制Launch文件包含,在launc
Mac下使用Eclipse编译C/C++文件出现 launch failed, binary not found 解决方案
Mac下使用Eclipse编译C/C++文件出现 launch failed, binary not found 解决方案 在使用Eclispe新建C++项目时注意一下设置Advanced setting就可以避免出现上面的问题,具体链接见http://www.jb51.net/article/56878.htm
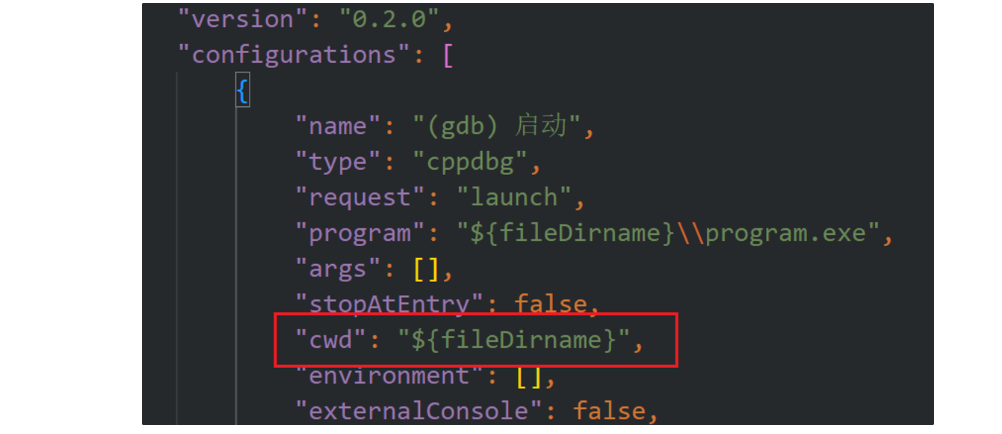
C++ VScode: launch: program ...... dose not exist
VScode: launch: program … dose not exist 介绍 参考VS Code 配置 C/C++ 编程运行环境(保姆级教程)教程配置了VSCode。在配置launch.json适用多个.c 文件编译时,弹出下面错误。 原因和解决方法 是task.json 默认配置的问题。 默认的 cwd参数值C:\\msys64\\ucrt64\\bin 需要改为和 la
torch.distributed.launch使用中的问题
error:unrecognized argument: --local-rank=0 link AttributeError: module numpy has no attribute int solu AttributeError: ‘MMDistributedDataParallel’ object has no attribute ‘_use_replicated_te
Rust:文件 launch.json 有什么用?
launch.json 是 Visual Studio Code(VSCode)中的一个配置文件,主要用于配置调试器。当你在 VSCode 中进行代码调试时,launch.json 文件告诉调试器如何启动和配置你的程序。 具体来说,launch.json 文件包含了以下信息: 调试配置的名称:每个配置都有一个名称,这样你可以轻松地选择哪个配置来启动调试会话。程序类型:例如,你可能正在调试一个

【PX4-AutoPilot教程-TIPS】MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法
MAVROS2运行px4.launch文件报错ValueError无法启动的解决方法 问题描述解决方法 环境: Ubuntu :20.04 LTS ROS :ROS2 Foxy PX4 :1.13.0 问题描述 在使用命令ros2 launch mavros px4.launch命令启动MAVROS2与PX4之间的连接时报错,无法启动MAVROS2,报错信息如下。 h
As抽风:Could not identify launch activity: Default Activity not found Error while Launching activity
本人也是用As差不多不到时间,现在用的是2.0正式版本! 今天 我就是抽取了一个抽象方法,抽风的as 就报 Could not identify launch activity: Default Activity not found Error while Launching activity 这个,下宝宝一跳,各种撤回都不行,这可咋办,项目还要做不是,于是开启了 stackoverflow ,坑
vscode调试时如何在launch.json中添加环境变量
"configurations": [{"name": "g++ - 生成和调试活动文件","type": "cppdbg","request": "launch","program": "************************","args": ["**************************"],"stopAtEntry": false,"cwd": "*******
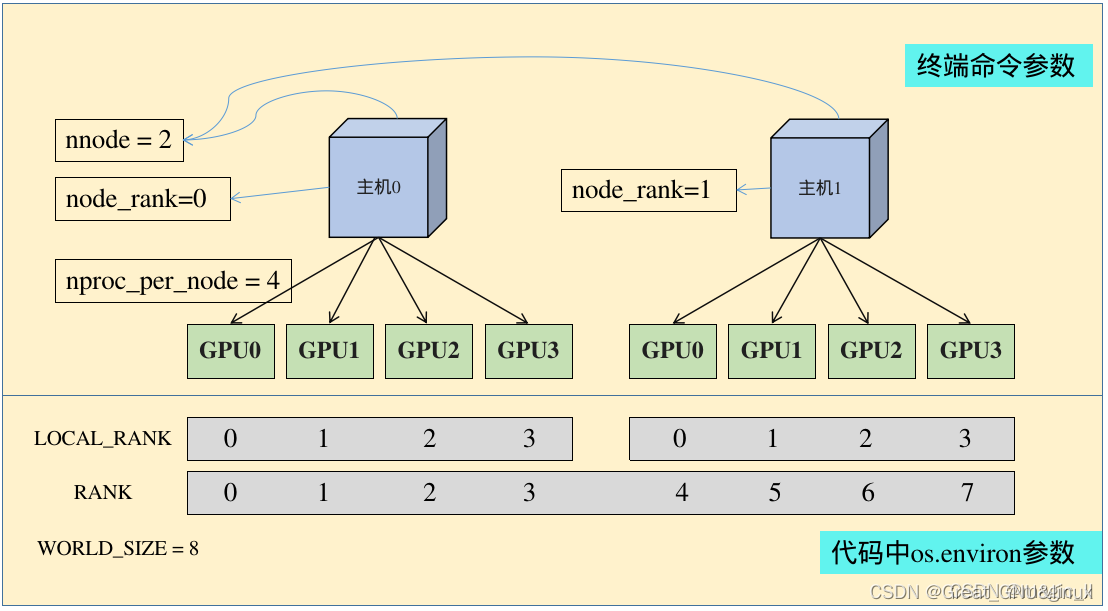
Pytorch分布式train——pytorch.distributed.launch V.S. torchrun
1. 较早的pytorch.distributed.launch python -m torch.distributed.launch --nproc_per_node=4 --nnodes=1 --node_rank=0 train.py --args XXX 参数解析: nnodes:节点(主机)的数量,通常一个节点对应一个主机 node_rank:指的是当前启动的是第几台服务
[原创]轻松玩转vscode launch.json tasks.json linux启动c程序编译c程序
编译c++网上的确有现成的插件,但是一点都不好用,比如需要传递个参数就蛋疼了。 技巧1: 自定义快捷键编译 技巧2:自定义编译命令 launch.json {"version": "0.2.0","configurations": [{"name": "C++ Launch","cwd": "${workspaceFolder}","type": "cppdbg","request": "lau
单机多GPU的训练及debug中vscode下launch.json内容设置
1.预配置 Local_rank:当前机子上的第几块GPU。这里设置为-1,后续多线程自动分配显卡。 Cuda_visible_devices:指定分配资源到几块显卡上,这里‘0,1,2,3’就是这四张gpu的id。 os.environ['LOCAL_RANK'] = '-1'os.environ['CUDA_VISIBLE_DEVICES'] = '0,1,2,3' 2.初始化 其
![ERROR:can not launch node of type[]:can't loacte node [] in package []](https://img-blog.csdnimg.cn/20200405143402303.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3R4eTEyMDI5MDQ3,size_16,color_FFFFFF,t_70)
ERROR:can not launch node of type[]:can't loacte node [] in package []
博主最近在做3D数据采集,官网给出的开源工具里面调用的是openni2-camera-lcm。使用的是Asus Xtion2相机。而我手里只有Intel相机。为此我需要将Intel相机采集的数据格式由RGB-D转换为LCM格式。【LCM(Lightweight Communications and Marshalling)是一套用于消息传递和数据编组的库和工具, 它提供了一个发布/订阅消息传递模型