本文主要是介绍roslaunch 失败原因,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 没有source 在home的 ./bashrc文件的最后一行加上
source ~/自己的工作空间/devel/setup.bash2.模型加载无效
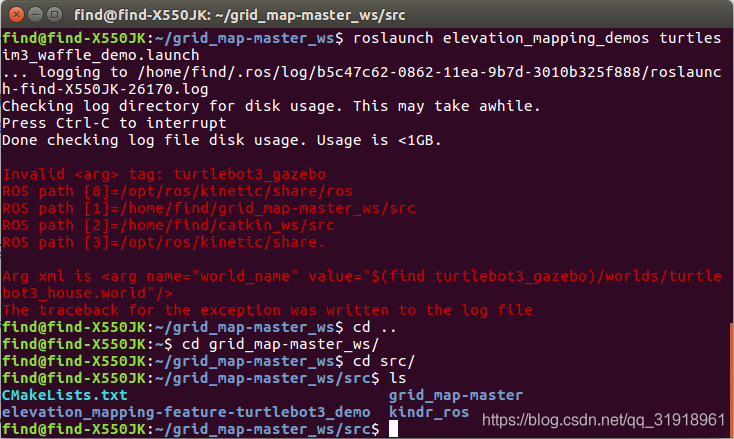
Invalid <arg> tag: turtlebot3_gazebo
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/find/grid_map-master_ws/src
ROS path [2]=/home/find/catkin_ws/src
ROS path [3]=/opt/ros/kinetic/share.
Arg xml is <arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_house.world"/>
The traceback for the exception was written to the log file
自己搭建了URDF文件,调用结果提示找不到模型,
参考链接 参考该链接得知可能是ros版本不对,我之前是将ubuntu18.04的文件夹拷贝到16.04下重新编译了下,编译通过,但是roslaunch不能通过,于是进行修改
重新粘贴后发现还是不能通过,于是下载了小车模型,
sudo apt install ros-melodic-turtlebot3*在roslaunch则启动成功
这篇关于roslaunch 失败原因的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







