registration专题
npm login 或者 npm adduser 之后 遇见 Public registration is not allowed
npm login 或者 npm adduser 之后 遇见 Public registration is not allowed 其实是因为npm镜像地址有问题 使用下方指令 将镜像切回即可正确完成登录操作 npm config set registry https://registry.npmjs.org/ 今天就总结到这里啦! 后续会不定时更新哦,欢迎在评论区交流。 如果文章对你

Sessions, Users和 Registration
在本章中你将学会如何搞定状态的问题。好了,我们会从较低的层次(cookies)开始,然后过渡到用高层的工具来搞定会话,用户和注册的问题。 Cookies 浏览器的开发者在很早的时候就已经意识到, HTTP’s 的无状态会对Web开发者带来很大的问题,于是(cookies)应运而生。cookies 是浏览器为 Web 服务器存储的一小段信息。每次浏览

Medical image registration(section7)
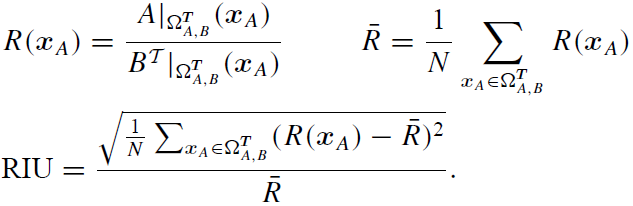
7. 体素相似度量intramodality配准 在第6章我们介绍了通过优化一个体素相似度量来对相同模型影像进行配准。由于配准中图像强度的相似性,subtraction, correlation和ratio techniques都能够直观的描述。但在intermodality配准中情况就完全不一样了。一般情况下,影像A和影像B的强度之间并没有简单的对应关系。根据第2章内容,强
Medical image registration(section6)
6. 体素相似度量intramodality配准 体素相似度量(Similarity measure)配准涉及通过优化一些估量来计算配准变换T,不同于点和表面这些衍生自影像中的几何结构,它直接从体素值(或是像素值)计算得来。正如第2节所属,使用体素相似性度量,我们几乎总是在迭代确定T,而在点的配准或是表面匹配中我们先确定相应的特征,然后直接或是从这些特征中迭代确定T,最后推断出T。

Medical image registration(section5)
5. 使用几何特征的刚体配准算法 5.2. 表面匹配 边界或物体表面,在医疗影像中往往是更明显的地标,大量的分割算法都可以成功找到这样的高对比度表面。在大多数成像方式中,人体和空气之间的边界是有着高对比度的,从中找到皮肤表面易如反掌。这完全不同于核医学发射断层扫描和一些回波平面磁共振影像的示踪剂。如果可以从两个影像中自动分割出能够组合的等效表面,那么我们就可以通过拟合这些表面来实

DeepI2P: Image-to-Point Cloud Registration via Deep Classification
文章地址https://openaccess.thecvf.com/content/CVPR2021/papers/Li_DeepI2P_Image-to-Point_Cloud_Registration_via_Deep_Classification_CVPR_2021_paper.pdf 摘要: 本文提出了DeepI2P:一种新颖的方法,用于图像与点云之间的跨模态注册。给定一幅图像(

雷达系列论文翻译(九):3D Scan Registration Using the Normal Distributions Transform
3D Scan Registration Using the Normal Distributions Transform with Ground Segmentation and Point Cloud Clustering 这篇论文是之后的第十篇论文的简述版,两者基本上没有区别,这里提到的贪婪聚类就是下一篇讲到的区域生长聚类方法 摘要 正态分布变换(NDT)扫描配准算法将环境建模为

前端:An iterative image registration technique with an application to stereo vision
这篇论文主要记录Lucas 光流法,KLT光流跟踪的基础。图像点定位的方法,即图像的局部匹配,将图像匹配问题,从传统的滑动窗口搜索方法变为一个求解偏移量d的过程 【摘要】 主要讲了图像配准的一种方法–利用图像的空间强度梯度和牛顿迭代法找到好的匹配。此方法更快(仅从较少的匹配中筛选)且适用于旋转、尺度、裁剪等变换。 【简介】 现存的方法代价大且不能处理旋转或者其他变形的情况,提出了一种新的技术–

chrome 扩展 Service worker registration failed 解决
问题: 背景页无效 有几个注意点, 1、版本及格式问题: 这里用的是**“manifest_version”: 3**,所以配置文件(manifest.json)跟2的写法有些不一样了,官网上是这样写 照着官网写,貌似没毛病哦,可是就是出了毛病,背景页无效 2、文件引入问题: 我给放在js文件夹里面了,这样是不对的,background文件要放在根目录。 所以,解决办法就是把backgro
CF4C--Registration System翻译
原题链接-- https://acs.jxnu.edu.cn/problem/CF4Chttps://acs.jxnu.edu.cn/problem/CF4C Registration System 5000ms 65536K 描述: A new e-mail service "Berlandesk" is going to be opened in Berland in the n

论文阅读 《Multimodal Remote Sensing Image Registration Based on Image Transfer and Local Features》
该文章是一篇遥感图像融合的文章,但在图片的预处理中,使用风格迁移的方法对图片进行了处理,使得使用经典的SIFT方法进行图像配准拼接时能够找到更多对应特征,从而实现更好地融合效果。 1.Motivation 多模态遥感图像的自动配准是一个具有挑战性的问题,包括其中包括光学、光探测与测距、合成孔径雷达图像等多种图像之间的配准问题。由于成像原理的不同,这些图像在局部区域的灰度值、纹理和景观特征也不同

Picking, Registration, Reservation, Marking..What’s the Difference?
几个概念解释的非常清楚。原文来自于: http://es-ax.blogspot.in/2012/02/picking-registration-reservation.html Picking, Registration, Reservation, Marking..What’s the Difference? The different ways of selec
npm login报错:Public registration is not allowed
npm login报错:Public registration is not allowed 1.出现场景2.解决 1.出现场景 npm login登录时,出现 2.解决 将自己的npm镜像源改为npm的https://registry.npmjs.org/这个,解决!
npm login报错:Public registration is not allowed
npm login报错:Public registration is not allowed 1.出现场景2.解决 1.出现场景 npm login登录时,出现 2.解决 将自己的npm镜像源改为npm的https://registry.npmjs.org/这个,解决!
Registration Concepts With Autofac
Registration Concepts 注册概念 You register components with Autofac by creating a ContainerBuilder and informing the builder which components expose which services. 通过Autofac注册组件创建一个ContainerBuilder并且通

【论文笔记】点云配准网络 3DRegNet: A Deep Neural Network for 3D Point Registration 2020
Instituto Superior T ́ecnico, Lisboa; Google;印度科学研究所,班加罗尔;马里兰大学帕克分校 代码链接:https://github.com/3DVisionISR/3DRegNet 本文提出了一种基于深度学习的点云配准方法3DRegNet,超越了现有RANSAC和ICP的精度,同时在CPU上也达到了25倍RANSAC的速度。 注意3DRegNe
论文笔记 BIRNet: Brain image registration using dual-supervised fully convolutional networks
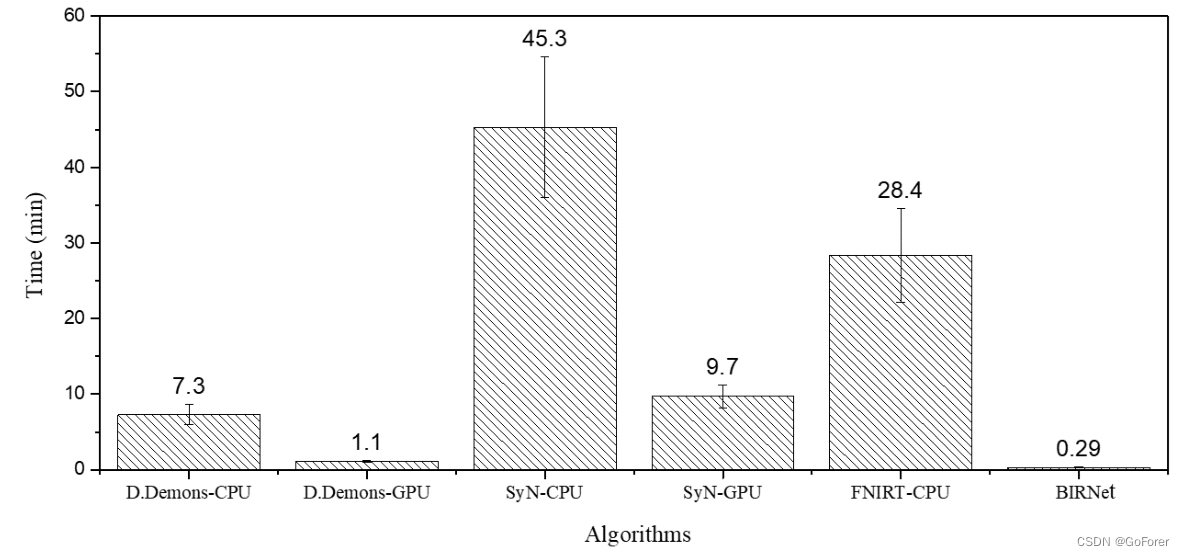
BIRNet: Brain image registration using dual-supervised fully convolutional networks Med Image Anal. 2019 May ; 54: 193–206. doi:10.1016/j.media.2019.03.006. 摘要 文章提出了一种通过从图像外观预测变形来进行图像配准的深度学习方法。由于
springcloud——registration status: 204
这是因为缺少依赖导致的,在pom中加入以下依赖即可 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-web</artifactId></dependency>

PTA advanced level 1153 Decode Registration Card of PAT (25 分) 测试点4答案错误
1153 测试点4答案错误 题目内容源代码问题描述问题更新2021.4.21 题目内容 A registration card number of PAT consists of 4 parts: the 1st letter represents the test level, namely, T for the top level, A for advance and B
【论文笔记】基于深度学习的端到端无监督配准模型——变形图像配准网络(Deformable Image Registration Network, DIRNet)
本文是论文 End-to-End Unsupervised Deformable Image Registration with a Convolutional Neural Network 的阅读笔记。 文章提出了一种端到端的无监督配准模型——变形图像配准网络(Deformable Image Registration Network, DIRNet),并在手写数字数据集 MNIST 和心脏电影

X-ray 2D和CT 3D图像配准流程和算法总结 Fluoro-image and CT 3D image registration flowwork and algorithm
X-ray 2D和CT 3D图像配准流程和算法总结 Fluoro-image and CT 3D image registration flowwork and algorithm Reference to: Registration of 2D C-Arm and 3D CT Images for a C-Arm Image-Assisted Navigation System for Spi
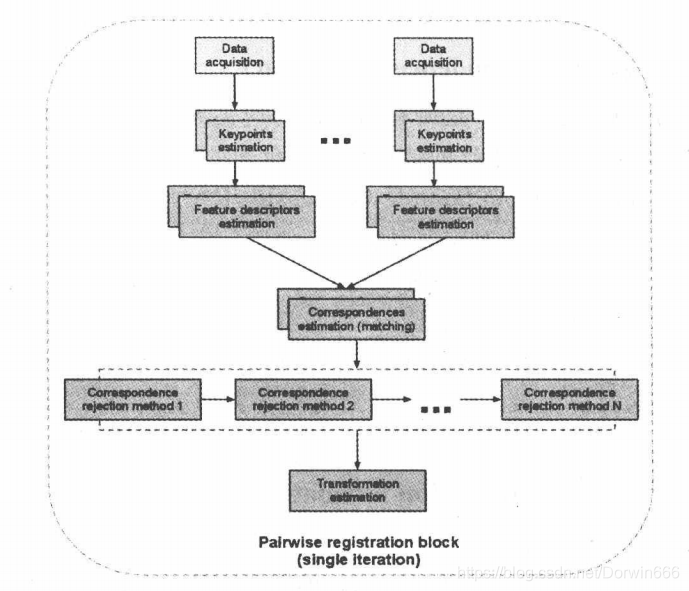
PCL配准接口(The PCL Registration API)
始终将各种3D点云数据视图对齐到一个完整模型的问题称为配准。其目标是在全球坐标框架中找到单独获取的视图的相对位置和方向,使它们之间的交叉区域完美重叠。对于从不同视图中获取的每一组点云数据集,我们都需要一个能够将它们组合到单个点云模型中的系统,以便可以应用后续处理步骤,例如分割和对象重建。 _images/scans.jpg 在上图中给出了这种意义上的激励示例,其中使用倾斜2D激光单元采集了一组六

springBoot2.2.2整合springBootAdmin2.2.1之 domain.values.Registration cannot deserialize from Object
报错如下: server报错: 2020-02-19 14:01:50,989 ERROR 3720 --- [http-nio-8016-exec-8] o.a.c.c.C.[.[.[/].[dispatcherServlet] DirectJDKLog.java:175: Servlet.service() for servlet [dispatcherServlet] in con
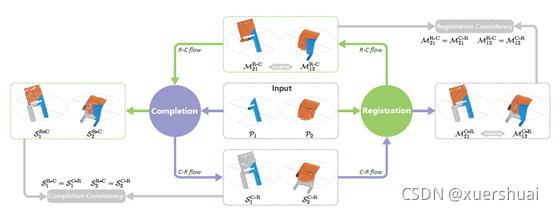
论文阅读Consistent Two-Flow Network for Tele-Registration of Point Clouds
出自:出自深圳大学计算机科学与软件工程学院 期刊:未知 摘要 局部观测值的刚性配准是各个应用领域的一个基本问题。在计算机图形学中,特别注意由扫描设备产生的两个局部点云之间的配准。当两个点云之间的重叠区域很小时,最先进的配准技术很难实现配准,而当扫描对之间没有重叠时,则完全失败。在本文中,我们提出了一种基于学习的技术来缓解这一问题,点云以任意姿态呈现,很少或甚至没有重叠,这种设置被称为tele-r
ICP in PCL Registration
ICP in PCL Registration 点云配准是什么,维基百科上这样介绍: Point cloud registration, is the process of finding a spatial transformation that aligns two point clouds. The purpose is to merge point clouds of multiple

医学图像配准 (Medical Image Registration)
目录 Classification Transformation Registration Algorithms Landmark Based Surfaced Based Voxel Intensity Based Information Theory Based Registration using basis functions Registration using sp