planning专题

AI - Planning
Motion PlanningCollision-free Path Collision Free Check Matlab Figure for Box Bounding Test MethodLine Segments Test Method Configuration Space C-Space Motion Planning 使用States建立State Gr

Apollo9.0 PNC源码学习之Planning模块—— Lattice规划(七):横纵向运动轨迹的优选
参考文章: (1)Apollo6.0代码Lattice算法详解——Part 7: 获得最优轨迹 (2)Lattice算法详解 0 前言 // 优选出cost最小的trajectory// 7. always get the best pair of trajectories to combine; return the first// collision-free trajectory

Apollo9.0 PNC源码学习之Planning模块(一)—— 规划概览
0 前言 规划本质就是搜索问题,数学角度来看就是寻找函数最优解 规划模块复杂的就是相关的逻辑处理和过程计算 对于规划的三维问题,目前解决方案:降维+迭代 将SLT问题分解为ST和SL二维优化问题:在一个维度优化之后,再另一个维度再进行优化,最后整合成三维的轨迹。 虽然降维后分开求解再合并的解并不是高维下的最优解,但是已经足够使用 Apollo9.0的planning代码框架 pl
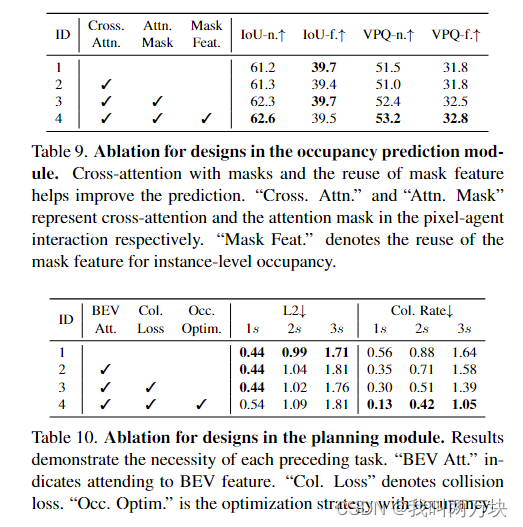
【论文解读】Planning-oriented Autonomous Driving
UniAD 摘要引言方法Perception: Tracking and MappingPrediction: Motion ForecastingPrediction: Occupancy PredictionPlanningLearning 实验结论 摘要 现代自动驾驶系统的特征是按顺序的模块化任务,即感知、预测和规划。为了执行广泛多样的任务并实现高级智能,现代方法要么为单个
poj 1639 Picnic Planning(最小K度限制生成树)
hihoCoder挑战赛11来啦!有Tshirt作为奖品哦~ Language: Default Picnic Planning Time Limit: 5000MS Memory Limit: 10000KTotal Submissions: 9563 Accepted: 3427 Description The Contortion Brothers are a

AI大模型探索之路-实战篇16:优化决策流程:Agent智能数据分析平台中Planning功能实践
系列篇章💥 AI大模型探索之路-实战篇4:深入DB-GPT数据应用开发框架调研 AI大模型探索之路-实战篇5:探索Open Interpreter开放代码解释器调研 AI大模型探索之路-实战篇6:掌握Function Calling的详细流程 AI大模型探索之路-实战篇7:Function Calling技术实战自动生成函数 AI大模型探索之路-实战篇8:多轮对话与Function Calli

ORACLE EPM 11.1.2.3 Hyperion planning Essbase 安装配置全纪录
1、虚拟机信息: 操作系统:Windows2008 Server(64位) IP地址:192.168.56.222 本地安装Oracle11g数据库,中文字符集。 内存:8G (亲测小于8G的话跑步起来会很费力) 硬盘可用空间:45G 2、操作系统配置: 2.1、取消用户访问控制 2.2、修改hosts信息: 使自己的主机名与IP对应起来。 2.3、安装JR
【论文阅读】K-Pointer-Network for Express Delivery Routes Planning
文章目录 论文基本信息摘要1.引言2. THE METHOD3. RESULT4. DISCUSSION5. 总结补充 论文基本信息 《K-Pointer-Network for Express Delivery Routes Planning》 摘要 在本研究中,作者打算提供一个合适的快速分配路径的设计,以缩短交货时间。如果路线规划不当,城市之间的快递运送时间将非常长。本实

LLMs Can’t Plan, But Can Help Planning in LLM-Modulo Frameworks
更多精彩内容,请关注微信公众号:NLP分享汇 原文链接:LLMs Can’t Plan, But Can Help Planning in LLM-Modulo Frameworks 你是怎么理解LLM的规划和推理能力呢,来自亚利桑那州立大学最近的一篇论文,对LLM的规划、推理能力提出了一些新看法。 在看这篇文章时,你不妨可以带入以下角色进行理解: 乐观型:认为只要采用了合适的提
hdu 1158 (dp)Employment Planning
做的时候,头有点昏。糊里糊涂就ac了。。。 #include <iostream>using namespace std;int m1[100000],m2[100000];int main(){int m;int p[13],a,b,c;while(scanf("%d",&m)==1&&m){scanf("%d %d %d",&a,&b,&c);int mp=0;for(in
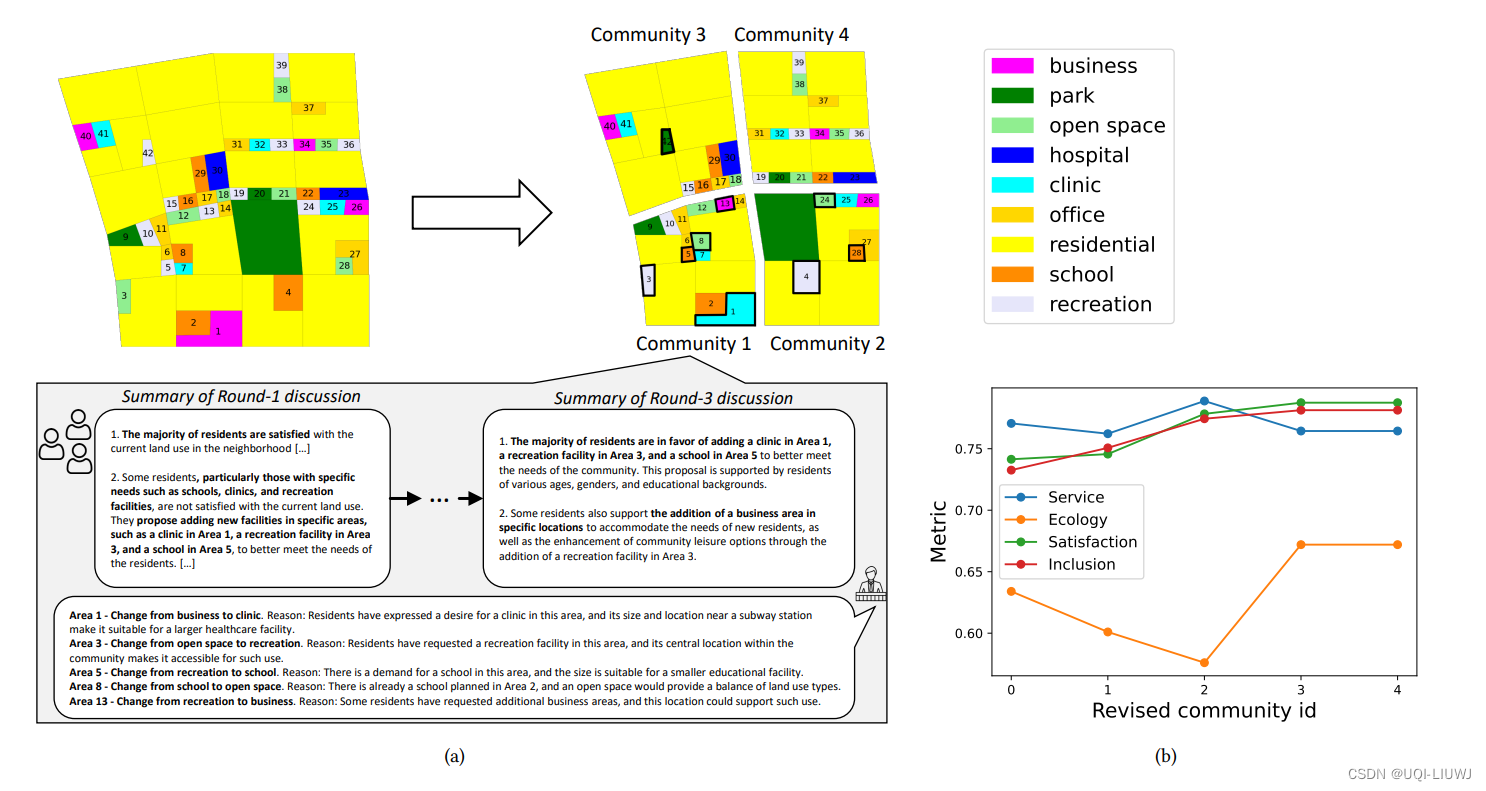
论文笔记:Large Language Model for Participatory Urban Planning
202402 arxiv 大模型+城市规划 引入了一个基于LLM的多代理协作框架,模拟规划师和数千名具有不同特征和背景的居民,用于参与式城市规划——>生成考虑居民多样化需求的城市区域土地利用规划为了提高讨论的效率,论文采用了鱼缸讨论机制,其中部分居民讨论,其余的居民在每一轮中充当听众 1 方法 1.1 总体方法 1.2 鱼缸讨论机制 1.3 planner的prompt和回答

Microsoft SharePoint Technologies : Planning, Design and Implementation
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。http://blog.csdn.net/topmvp - topmvp Microsoft SharePoint Technologies: Planning, Design and Implementation provides an in-depth examination o
Planning for Survivable Networks
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp Keep your network safe from security disasters with a dependable recovery strategy Companies are finally
Cases on Information Technology Planning, Design And Implementation
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp Cases on Information Technology Planning, Design and Implementation brings together a variety of real-lif

WCDMA (UMTS) Deployment Handbook: Planning and Optimization Aspects
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp A complete and practical guide to WCDMA/UMTS cellular network deployment. After introducing the netwo
Guerrilla Capacity Planning: A Tactical Approach to Planning for Highly Scalable Applications and Se
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp In these days of shortened fiscal horizons and contracted time-to-market schedules, traditional approac
Microsoft SharePoint 2007 Technologies: Planning, Design and Implementation
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp Microsoft SharePoint 2007 Technologies: Planning, Design and Implementation provides an in-depth examin
SP18966 VACATION - Vacation Planning 题解
题目传送门 题意简述 给定一张有向带权图,有 Q Q Q 个请求,每个请求给出点 a i a_i ai, b i b_i bi,费用为 a i a_i ai 经过点 1 → K 1 \rightarrow K 1→K 中的至少一个到达 b i b_i bi 的最小权值和。求出可行的请求数和最小费用和。 分析 有多个询问,很明显是多源最短路,求多源最短路可以用 Floyd,
区域规划(Regional Planning)的学习笔记
目录 一、概念题 1.区域的概念、类型、特性 2.区域分析的概念、主要内容 3.自然环境、自然资源的概念 4.区域自然资源评价的内容 5.可持续发展理论定义 6.经济增长、经济结构定义 7.产业结构概念 8.人口增长分析的含义、指标 9.技术进步概念、类型 10.技术进步对区域发展影响 11.科技论文、专利、科技成果定义 12.绿色GDP、人类发展指数 13.区域优势概
自动驾驶---Motion Planning之Speed Boundary
1 背景 在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使用优化的方法求解得到最终的轨迹信息(s,s',s'',l,l',l'')
自动驾驶---Motion Planning之Speed Boundary(上)
1 背景 在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使用优化的方法求解得到最终的轨迹信息(s,s',s'',l,l',l'')
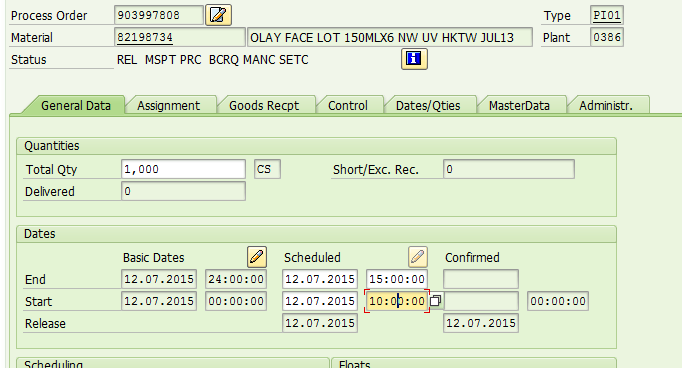
【Planning】PI - 关于多个operation的lead time scheduling
Purpose 不同于discrete manufacturing,不同的operation要么linear要么overlapping地进行process, 所以lead time scheduling是总和;而在process/flow manufacturing中,Lead time总是采取longest lead time;这一点,在production order的routing中
自动驾驶---Motion Planning之Path Boundary
1 背景 在上文《自动驾驶---Motion Planning之LaneChange》中,笔者提到过两种LaneChange的思路,这里再简单回顾一下:(1)利用Routing和周围环境的信息,决定是否进行换道的决策;(2)采用的博弈思想(蒙特卡洛树搜索---MCTS)决定是否进行换道的决策。不管是变道,避让还是借道等决策,如果后续采用优化的思想进行局部轨迹的求解,那么在求解之前
ROS 运动规划 (Motion Planning): MoveIt! 与 OMPL
最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错误怎么解决。表面上看,解决这些问题的方法就是提供正确的代码,正确的编译方法,正确的运行步骤。 然而,这种解决方法只能解决这个特定的问题,而且解决之后我们也无法学到一些实际的东西。要想彻底明白,需要从源头入手,也就是说, 不要问“MoveIt! 怎么把机械手从空间一个点移到另一个点
2022美国大学生数学建模(优秀获奖论文)-A题:Power Planning Model: Magic Weapon for Cyclists(续)
目录 5.4.3 Multivariate nonlinear programming 5.5 Model Solving and Evaluation 5.5.1 Model Solution 5.5.2 Model Solution Method Evaluation 6 Application
2022美国大学生数学建模(优秀获奖论文)-A题:Power Planning Model: Magic Weapon for Cyclists
目录 Summary 1 Introduction 1.1 Background 1.2 Restatement of the Problem 1.3 Our Work 2 Assumptions and Justifification 3 Notations