melodic专题
【Ubuntu18.04+melodic】抓取环境设置
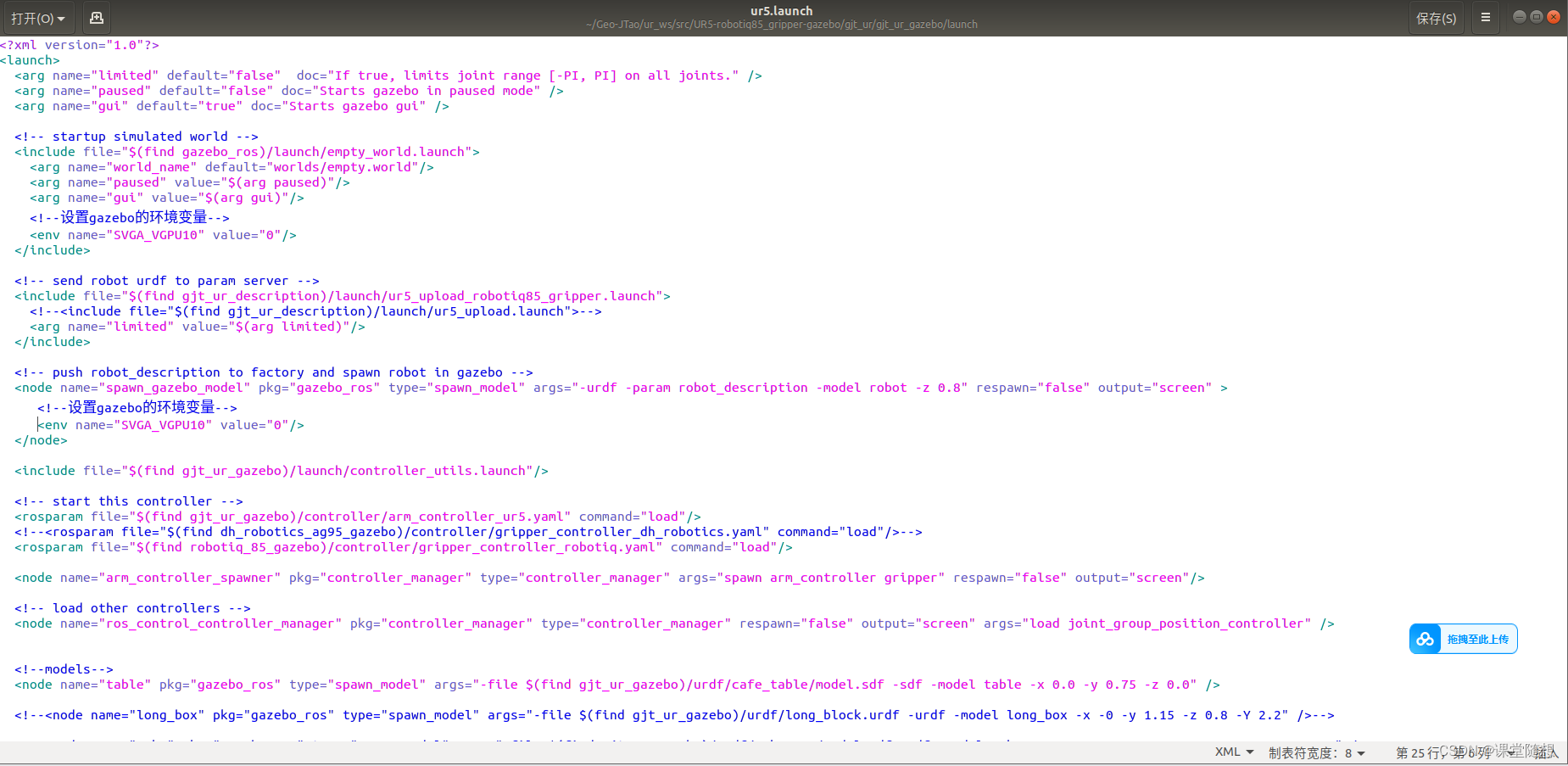
UR5_gripper_camera_gazebo(无moveit) 视频讲解 B站-我要一米八了-抓取不止!Ubuntu 18.04下UR5机械臂搭建Gazebo环境|开源分享 运行步骤 1.创建工作空间 catkin_make 2.激活环境变量 source devel/setup.bash 3.1 rviz下查看模型 roslaunch gjt_ur_d

番外篇 百分百解决XML Document ‘/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml‘ has no Root Element.报错
出现的问题 在使用rqt工具时,报错如图所示: [ERROR] [1627898425.729156095]: Skipped loading plugin with error: XML Document '/opt/ros/melodic/share/rqt_virtual_joy/plugin.xml' has no Root Element. This likely means t

【EdgeBox-8120AI-TX2】Ubuntu18.04 + ROS_ Melodic + 星秒PAVO2单线激光 雷达评测
大家好,我是虎哥,好久不见,最近这断时间出现了一点变故,开始自己创业,很多事需要忙,所以停更了大约大半年,最近一切已经理顺,所以我还是抽空继续我之前的FLAG,CSDN突破十万粉丝计划。 前段时间,我们又开始开发2D激光雷达方案,听说了这款行业天花板的单线激光雷达,所以买到手的第一时间,就开始了评测。总结一下自己的简单测试经验,分享给大家,也是自己做个记录。

Couldn‘t find executable named teleop_twist_keyboard below /opt/ros/melodic/share/teleop_twist_keybo
操作系统Ubuntu18.04 问题 Couldn’t find executable named teleop_twist_keyboard below /opt/ros/melodic/share/teleop_twist_keyboard [rosrun] Found the following, but they’re either not files, 解决办法 我输错了

Guided Policy Search Ubuntu 18.04 + ROS melodic安装过程
Guided Policy Search Ubuntu 18.04 + ROS melodic安装过程 一 安装依赖二 下载以及预编译源码三 ROS Setup四 安装神经网络库五 测试GPS示例PR2-example六 总结 前提已安装 ROS-melodic+gazebo 一 安装依赖 python 使用Python 2.7版本。 pip install numpyp

Ubuntu18.04-ROS melodic -VLP_16激光雷达使用
OS and Version: Ubuntu 18.04 ROS Version: Melodic lidar: Velodyne_16 前期准备 1.激光雷达上电 2.将激光雷达连接到工控机的网口 3.禁用无线连接 一、配置工控机网口 1.设置有线网口中的IP4 2.设置ENP网络中的IP4设置为手动 3.设置为IP地址192.168.1.77,子网掩码255.255.255.0,网关1
ROS Melodic Ubuntu18.04 吸坑体质头铁安装
ROS 安装 ROS Melodic Ubuntu18.04 安装1. 找适合的版本2. 安装(按官网步骤)1. 配置系统软件源2. 添加ROS软件源3. 添加公钥4. 安装5. 初始化`rosdep`6. 配置环境变量7.构建工厂依赖8.验收安装是否完成 3. 参考文献 祝你好运 ROS Melodic Ubuntu18.04 安装 写个小学习笔记方便以后自己查看 2020
环境配置:Ubuntu18.04 ROS Melodic安装
前言 不同版本的Ubuntu与ROS存在对应关系。 ROS作为目前最受欢迎的机器人操作系统,其核心代码采用C++编写,并以BSD许可发布。ROS起源于2007年,是由斯坦福大学与机器人技术公司Willow Garage合作的Switchyard项目。2012年,ROS团队从Willow Garage独立出来,成立了一家非营利组织——开源机器人基金会(Open Source Robotics F

Ubuntu18.04 虚拟机配置 ROS Melodic 详细步骤
目录 一、ROS 简介1.1 什么是 ROS?1.2 ROS 产生、发展和壮大的原因和意义 二、ROS 安装及其应用实例2.1 配置 Ubuntu 软件库2.2 安装 ROS Melodic2.3 初始化 rosdep2.4 运行小乌龟实例 三、总结四、参考资料 本文内容: 什么是ROS? ROS产生、发展和壮大的原因和意义?在Ubuntu18系统中,安装对应版本的ROS软件;
Ubunutu18.04 ROS melodic 无人机 XTDrone PX4 仿真平台配置
一、依赖安装 sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python-pip python3-pip gawk pip2 ins

完美解决:在Ubuntu18.04下ROS Melodic基于python3的cv_bridge的一点子歪门邪道
由于在Ubuntu18.04下ROS Melodic是运行在python 2.7环境下,而我的程序需要运行在anaconda创建的python 3.x环境里,这就需要用到cv_bridge这个库,而不出意外的,各种报错,比如: from cv_bridge.boost.cv_bridge_boost import getCvTypeImportError: dynamic module doe
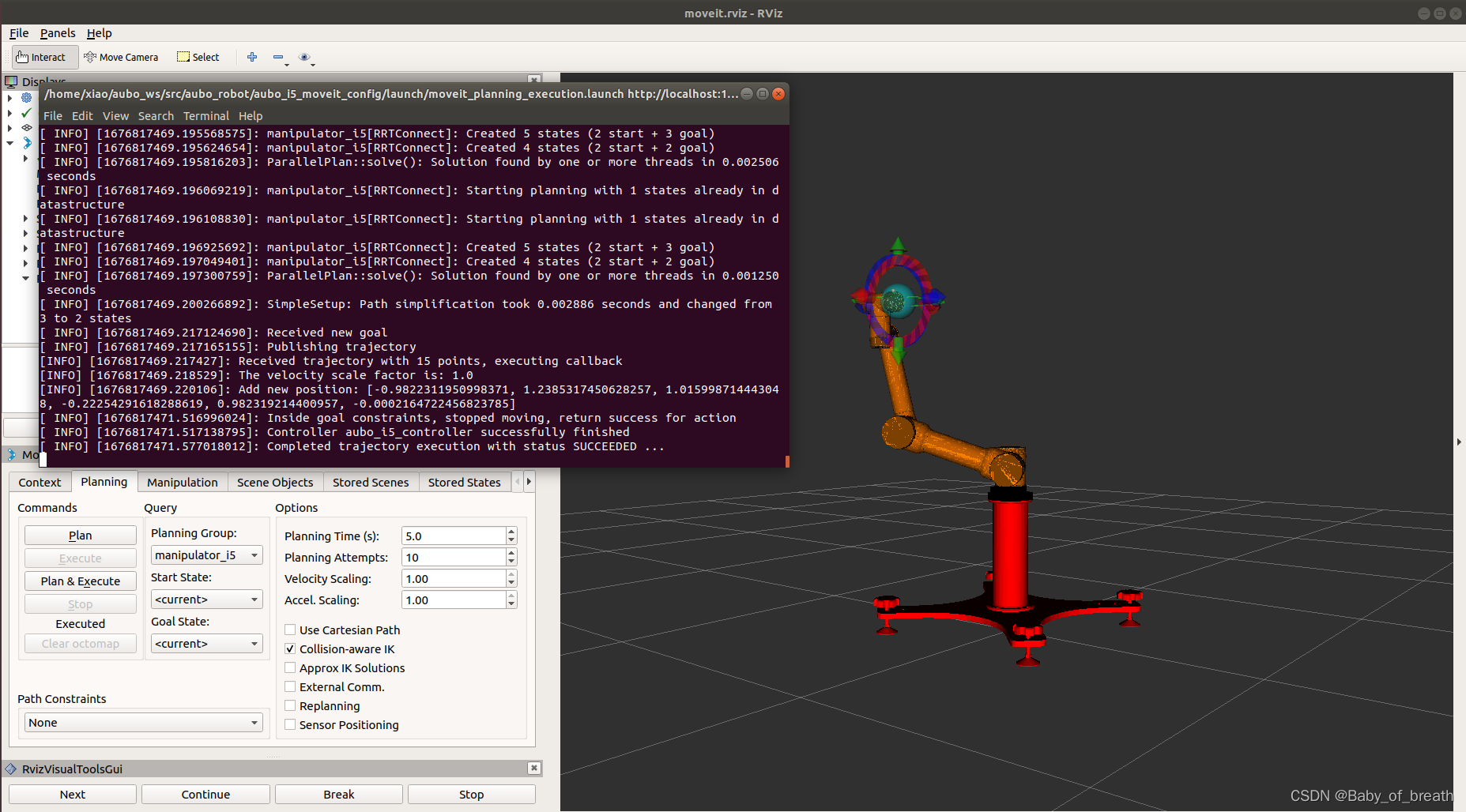
基于ROS-Melodic版本的AUBO-i5基础环境搭建
基于ROS-Melodic版本的AUBO-i5基础环境搭建 一、创建aubo_ws工作空间二、下载AUBO的功能包源码三、配置功能包的环境变量四、编译前的配置五、编译六、运行 版本:Ubuntu 18.04 ROS Melodic 一、创建aubo_ws工作空间 创建文件夹 mkdir -p ~/aubo_ws/src 编译 目的:将普通文件夹转变成ROS的工作空间。注

RoboSense(速腾)16线激光雷达在windows及Ubuntu18+ROS melodic下的实时数据展示
在学习ROS的cartographer建图时,基本都是仿真去实现的。近期公司项目有采购一个RoboSense(速腾)16线激光雷达,尝试接入激光雷达,在windows及Ubuntu18+ROS melodic下展示实时数据,并成功建图,现将实践历程分享记录在此。 一. 使用RSView工具实时展示RoboSense16的雷达数据 首先分享RoboSense16激光雷达相关资料,其中包括用户手册
![[joint_state_publisher-3] process has died,最新遇到的问题,基于ROS melodic版本](https://img-blog.csdnimg.cn/7b1e02c02b054e318fdc163a9cccb8cb.png)
[joint_state_publisher-3] process has died,最新遇到的问题,基于ROS melodic版本
如下图所示,这是我遇到的是这样的情况: 解决思路: 1、先确定是否安装了joint_state_publisher_gui,没有的话用下面的命令行:sudo apt-get install ros-xxx-joint-state-publisher-gui 因为我的版本是melodic,所以xxx是填melodic,其他同学的填自己电脑的版本即可 2、确保urdf文件的首行不能是注释;
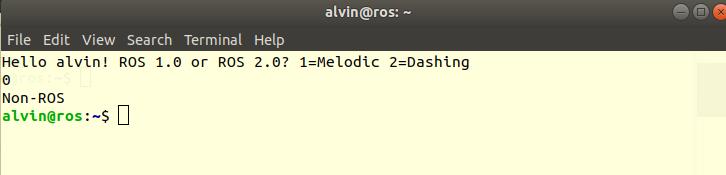
Ubuntu18.04 安装ROS Melodic Ros2 Dashing踩坑笔记
一、Ubuntu 18.04的安装 ubuntu2go的制作 关于Ubuntu2go:为了便利学习,采用把Ubuntu安装在U盘中在电脑上运行的方式是最佳的选择,当然你可以选择在你的电脑里安装双系统,之前对与Ubuntu2go的制作已经在参考Zhangrelay老师博客的基础上做了更详细的补充(其实张老师已经说的非常详细了,我算是把它白话了一下),这里附上链接: Ubuntu2Go制作使用
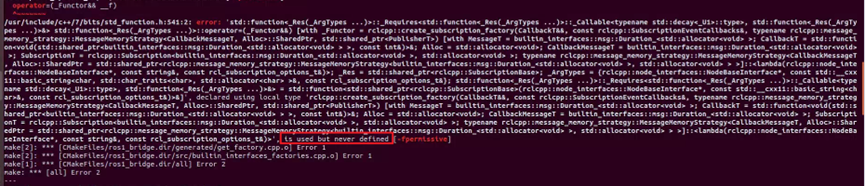
【ros2】ros melodic迁移到ros2 dashing过程中碰到的问题及解决方法
序言 总结踩坑经历,以利他人问题解决不易,觉得有用还请点赞收藏支持 1. error: forming pointer to reference type … & 报错原因: ros2回调函数的参数不能是引用形式 &,需要去除& 解决方法: 如果是指针引用,直接去除引用 void Callback(const your_topic_msgs::ConstPtr &msg)修改为voi

【ubuntu18.04出现E: 无法定位软件包 ros-melodic-cartographer-ros的问题】
ubuntu18.04出现E: 无法定位软件包 ros-melodic-cartographer-ros ubuntu出现无法定位软件包的问题,一般可以通过改变ROS的源来实现. 1、切换到清华源,设置软件源,国内的比较快 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/u

解决ros melodic中cv2.imshow报错问题
主要报错是 opencv\modules\highgui\src\window.cpp:651: error: (-2:Unspecified error) The function is not implemented. Rebuild the libra ry with Windows, GTK+ 2.x or Cocoa support. If you are on Ubuntu or D
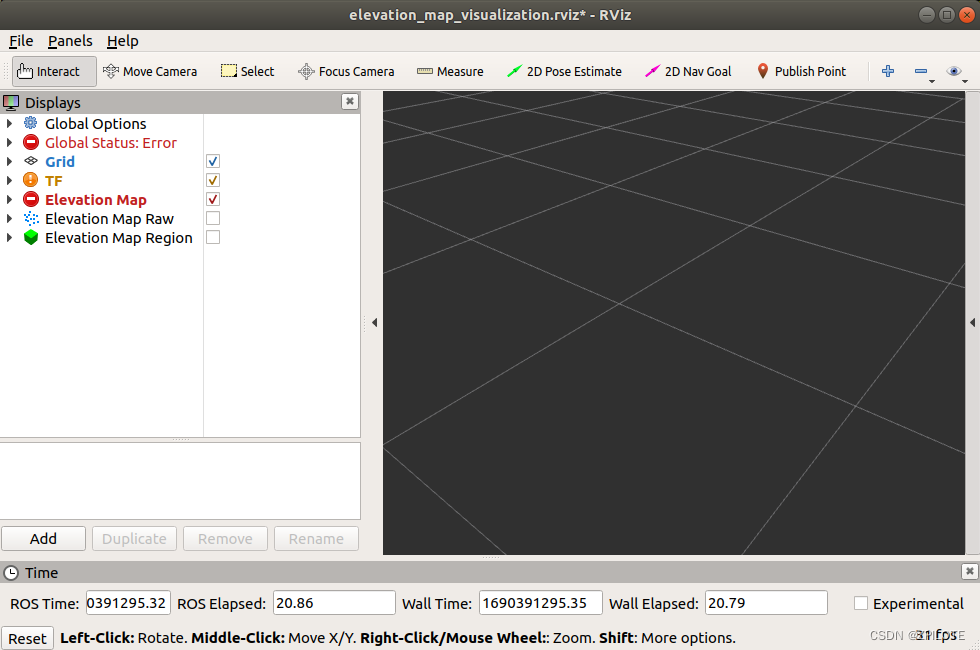
elevation mapping算法1之Ubuntu18.04+ROS-melodic编译安装elevation mapping高程图及示例运行
文章目录 0 引言1 安装依赖1.1 grid map1.2 Eigen1.3 kindr1.4 Point Cloud Library (PCL) 2 编译和问题解决3 运行示例3.1 turtlesim3_waffle_demo3.2 simple_demo 和 Ground Truth Demo 0 引言 苏黎世开源的elevation mapping指的是苏黎世联邦理工

grid map算法1之Ubuntu18.04+ROS-melodic编译安装grid_map栅格地图及示例运行
文章目录 0 引言1 安装依赖和编译1.1 安装依赖1.2 下载编译 2 运行示例2.1 simple_demo2.2 tutorial_demo2.3 iterators_demo2.4 image_to_gridmap_demo2.5 grid_map_to_image_demo2.6 opencv_demo2.7 resolution_change_demo2.8 filters_de
ubuntu18.04下ROS-melodic安装--告别外网站点限制
ROS安装 (强烈推荐鱼香ROS的一键安装!!!什么都不用管)在多次给自己以及帮助他人安装ROS时,饱受rosdep init,rosdep update失败的困扰,其原因就是通常无法连接到国外站点,导致系统文件无法下载。本人站在各位前辈的肩膀上总结出无需外网,无需运气的安装方法,供需要的同学采纳。首先选择中科大的镜像源(其他的如清华,阿里云亦可)添加软件源配置秘钥更新软件源安装rosdep