本文主要是介绍ROS Melodic Ubuntu18.04 吸坑体质头铁安装,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ROS 安装
- ROS Melodic Ubuntu18.04 安装
- 1. 找适合的版本
- 2. 安装(按官网步骤)
- 1. 配置系统软件源
- 2. 添加ROS软件源
- 3. 添加公钥
- 4. 安装
- 5. 初始化`rosdep`
- 6. 配置环境变量
- 7.构建工厂依赖
- 8.验收安装是否完成
- 3. 参考文献
- 祝你好运
ROS Melodic Ubuntu18.04 安装
写个小学习笔记方便以后自己查看
2020.12
目前安装教程其实跟官方的就好了,因为公钥会不时改变
ros-wiki 官方安装教程
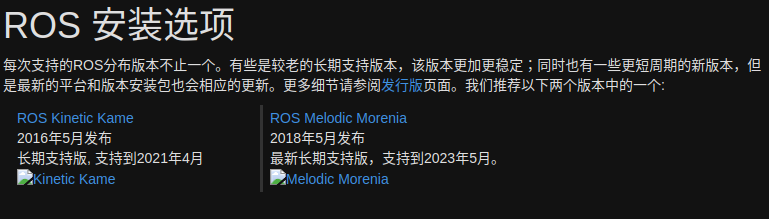
1. 找适合的版本
ROS官网上, 看到让你选择ROS版本:
然后查看ubuntu版本:
cat /etc/issue
可以看到我是 Ubuntu18.04 版本

然后我们百度查一下支持的版本:
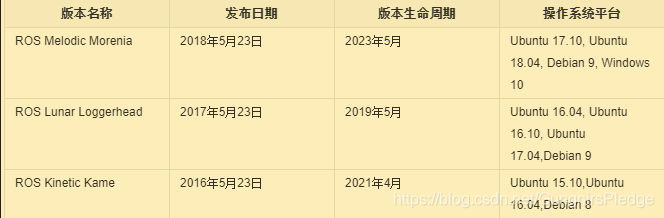
发现我们只能下载Melodic, 所以点击 ROS Melodic Morenia
然后是 Ubuntu 进入官方的安装下载教程里, 安装正式开始.
2. 安装(按官网步骤)
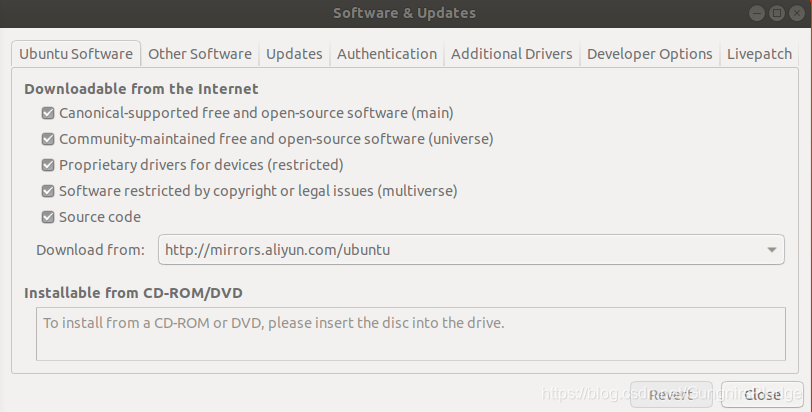
1. 配置系统软件源
因为国内有墙卡着不让上国外的网,所以先确定软件源
- 在ubuntu系统中
Software & Updates中确定如如下的图:
2. 添加ROS软件源
系统保存软件源地址的文件位于目录 /etc/apt/source.list 我们需要将ros软件源地址加到文件中, 所以打开终端, 输入命令添加ros 国内软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

3. 添加公钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116

4. 安装
sudo apt update
sudo apt install ros-melodic-desktop-full
他有可能會出現如下的情況:
The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654
Reading package lists... Done
W: GPG error: http://packages.ros.org/ros/ubuntu bionic InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654
E: The repository 'http://packages.ros.org/ros/ubuntu bionic InRelease' is not signed.
N: Updating from such a repository can't be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.解決的辦法:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
sudo apt-get update
這部分更新來自:https://www.cnblogs.com/chxuyuan/p/11340653.html
5. 初始化rosdep
sudo rosdep init
然后报错 rosdep: command not found 如图:

先不慌,因为没有安装 rosdep 所以当然找不到,官网的教程有点坑的. 然后安装.(这里参考的官网链接)
sudo apt-get install python-rosdep
然后再次初始化rosdep
sudo rosdep init
再次报错:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
先镇定, 解决它,命令行输入:
sudo gedit /etc/hosts
出现一个hosts文档,在文档最后一行加上下面代码,并保存
151.101.84.133 raw.githubusercontent.com
好了,我们继续初始化rosdep:
sudo rosdep init
出现如图:
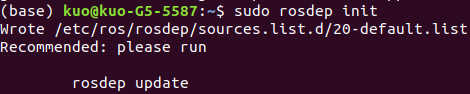
更新一下 rosdep:
rosdep update
还报错,心态有点崩了,继续解决

命令行输入:
sudo apt-get update
rosdep update
這裏一定要注意拿手機熱點來連接,這一點非常重要
出现如图:
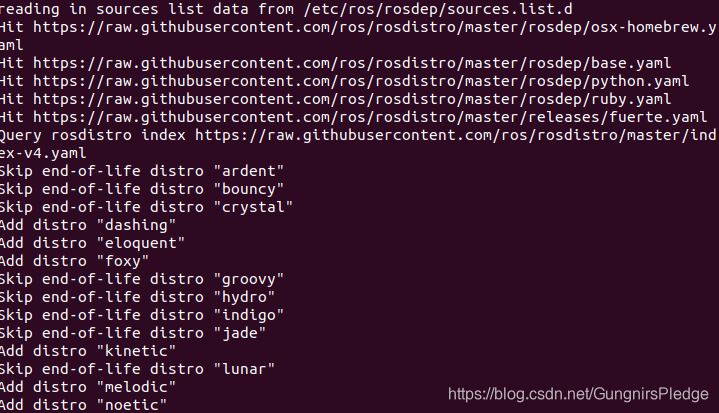
表示 rosdep 安装完成
6. 配置环境变量
命令行输入
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
7.构建工厂依赖
命令行输入:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
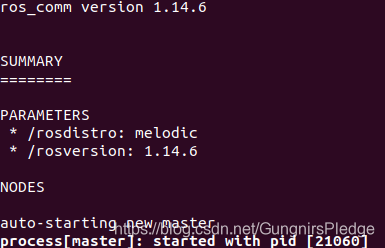
8.验收安装是否完成
这绝b是最让人心惊胆颤的一步,命令行输入:
roscore
出现如下图则为成功:
3. 参考文献
- https://www.jianshu.com/p/bdbfbac69114
- ROS 官方
- 官方rosdep
- @不会飞的小肥鱼
祝你好运
这篇关于ROS Melodic Ubuntu18.04 吸坑体质头铁安装的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








