本文主要是介绍【ros2】ros melodic迁移到ros2 dashing过程中碰到的问题及解决方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
序言
- 总结踩坑经历,以利他人
- 问题解决不易,觉得有用还请点赞收藏支持
1. error: forming pointer to reference type … &
-
报错原因: ros2回调函数的参数不能是引用形式 &,需要去除&
-
解决方法:
-
如果是指针引用,直接去除引用
void Callback(const your_topic_msgs::ConstPtr &msg)修改为 void Callback(const your_topic_msgs::ConstPtr msg) -
如果是普通引用,去掉&并使用指针参数
void Callback(const your_topic_msgs::SubStruct& msg)修改为 void Callback(const your_topic_msgs::SubStruct::ConstPtr msg)ConstPtr为ros2消息头文件中重定义的消息类型的const指针
-
2. error: no match for ‘operator=’ (operand types are ‘publisher xxx’ and ‘publisher::shared_ptr’
-
报错的代码:
rclcpp::Publisher<your_msg> pub_; pub_ = handler->create_publisher<your_msg>(“/your topic”, 1); -
报错原因: pub_声明的类型不对,应该声明为shared_ptr,即
rclcpp::Publisher<your_msg>::SharedPtr pub_;
3. boost::system::system_category() 或者 boost::system::generic_category()
-
报错的代码:

-
报错原因: 找不到boost方法的实现
-
解决方法: 添加boost功能包,并添加头文件+库文件的搜索路径
find_package(Boost 1.55.0 REQUIRED COMPONENTS system filesystem) include_directories(untitled ${Boost_INCLUDE_DIRS}) link_directories(untitled ${Boost_LIBRARY_DIRS}) target_link_libraries(untitled ${Boost_LIBRARIES})
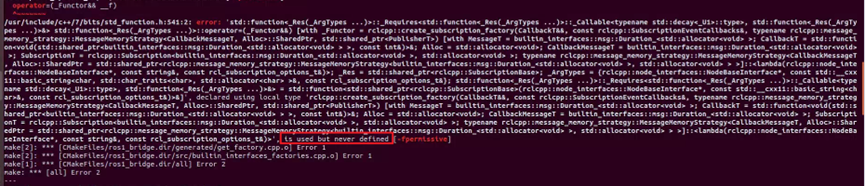
4. undefined reference to ‘rosidl_message_type_support_t const* rosidl_typesupport_cpp::get_message_type_support_handle<自定义消息名字>’
-
报错的代码:

-
报错原因: 链接生成可执行文件阶段,找不到函数实现。通常是.a或者.so(函数定义)的链接有问题
-
解决方法:
- 将编译好的install目录(包含include+share+lib)拷贝到项目里。install包含头文件、库文件以及.cmake配置文件等
- find_package: 中添加功能包,名字就是cmakelists.txt中的project_name,如perception_msgs
- include_directories:中添加头文件路径,your_path_to_msg/include/
- target_link_libraries: 中添加库文件路径,因为find_package(your_pkg)后都会产生环境变量 your_pkg_INCLUDE_DIRS和your_pkg_LIBRARIES,添加消息库文件如下
5. 构造函数报错error: no matching function for call to ‘rclcpp_lifecycle::LifecycleNode::LifecycleNode()’
-
报错的代码: 继承自rclcpp_lifecycle::LifecycleNode的子类构造函数报错


-
报错原因: 基类中没有不带参数的构造函数,这个时候需要调用基类构造函数,然后又没有显示调用基类中带参的构造函数,就会出现该报错
-
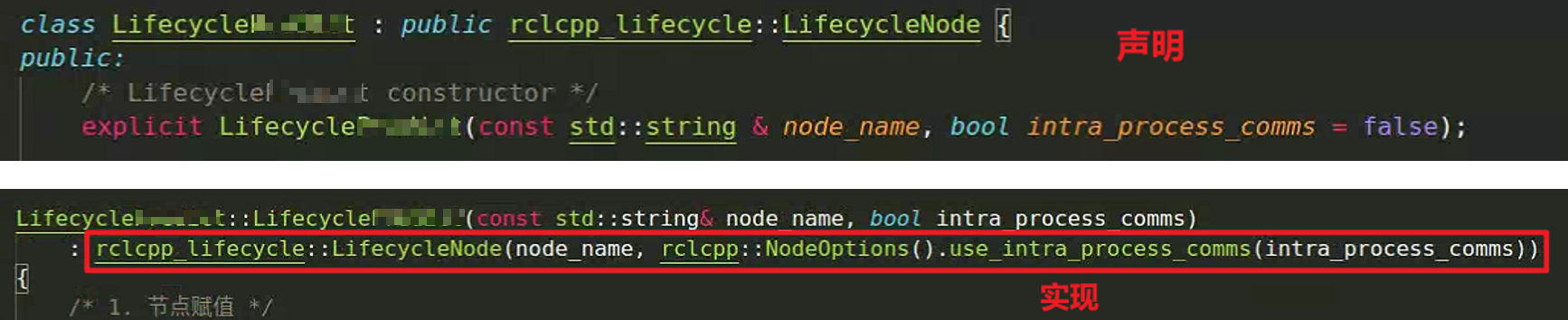
解决方法: 显示调用基类的构造函数,从而初始化从基类中继承来的成员变量。本问题解决如下
-
注:
当基类中只声明了带参构造函数的时候要特别注意,需要显示调用基类构造函数;
当基类中带参构造函数参数都有默认值时,在派生类中也可以不用显示调用基类构造函数;
当基类中既有无参又有有参构造函数时,当不显示调用,则默认调用基类无参构造函数。
6. error: no matching function for call to ‘rclcpp::executors::SingleThreadedExecutor::add_node()’
-
报错的代码: LifecycleYourNode继承自rclcpp_lifecycle::LifecycleNode这一行调用时报错如下


-
报错原因: 参数类型不匹配,executor.add_node(argument)的参数类型是std::shared_ptr<rclcpp::Node>而不是std::shared_ptr<rclcpp_lifecycle::LifecycleNode>
-
解决方法:

7. Could not find a package configuration file provided by “launch_test_ament_cmake” with any of the following names: launch_test_ament_cmakeConfig.cmake, launch_test_ament_cmake-config.cmake
-
报错描述: 下载ros1_bridge源码到ros2 dashing工程中编译报错
-
报错原因: 首先是使用的ros1_bridge版本与ros2版本不对应;其次,没有安装ros-dashing-launch相关的包,提示无法找到这些包
-
解决方法:
-
ros2版本和ros1_bridge版本要对应,否则会报找不到库函数以及头文件生成失败等,如下。下载ros2对应版本的ros1_bridge源码,比如dashing版本就下载 git clone -b dash https://github.com/ros2/ros1_bridge.git
-
安装ros-dashing-launch*包,如ros-dashing-launch-testing, ros-dashing-launch-testing-ament-cmake, ros-dashing-launch-testing-ros等,这些包没有默认安装
-
source环境变量source /opt/ros/dashing/setup.bash生效ros2编译环境
-
然后colcon build进行编译
-
8. UnicodeDecodeError: ‘ascii’ codec can’t decode byte 0xe8 in position 22: ordinal not in range(128)
- 报错原因:
- python采用的系统语言的环境变量不是utf-8,标准输出的编码不支持要处理的字符
- python的标准输出编码是由PYTHONENCODING等环境变量决定,如果没有就取系统环境变量LC_ALL等配置编码的值去设置标准输出
- 解决方法: 设置系统语言的环境变量为utf-8,在/etc/profile末尾添加:export LC_ALL=“en_US.utf8”
【参考文章】
移植到ros2 foxy碰到的报错
问题2参考文章1
问题2参考文章2
问题3参考文章1
问题3参考文章2
问题5参考文章1
问题5参考文章2
问题7参考文章
问题8参考文章
created by shuaixio, 2023.05.03
这篇关于【ros2】ros melodic迁移到ros2 dashing过程中碰到的问题及解决方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



