本文主要是介绍环境配置:Ubuntu18.04 ROS Melodic安装,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
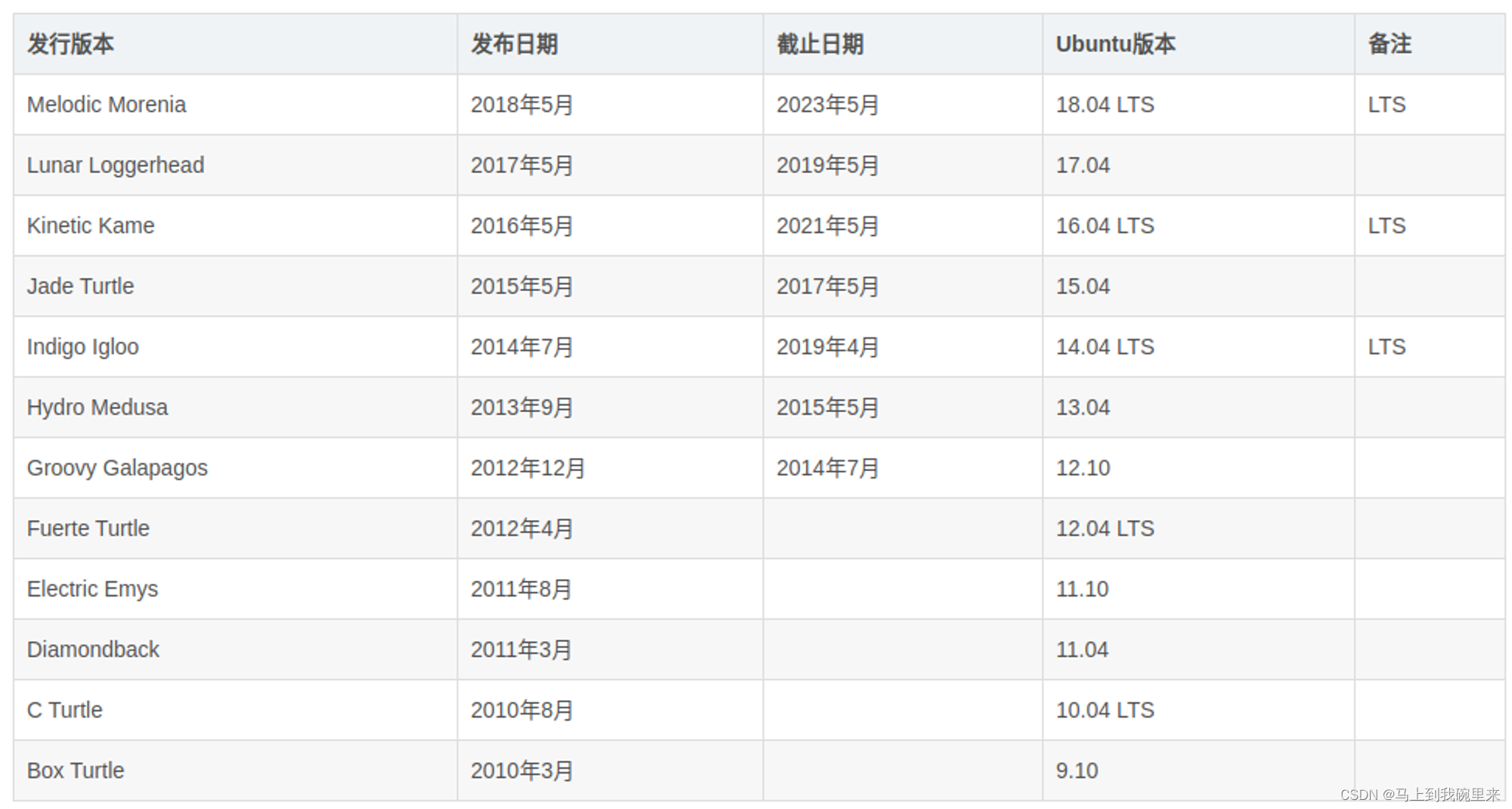
不同版本的Ubuntu与ROS存在对应关系。
ROS作为目前最受欢迎的机器人操作系统,其核心代码采用C++编写,并以BSD许可发布。ROS起源于2007年,是由斯坦福大学与机器人技术公司Willow Garage合作的Switchyard项目。2012年,ROS团队从Willow Garage独立出来,成立了一家非营利组织——开源机器人基金会(Open Source Robotics Foundation, OSRF),并于2013年将ROS移交给该基金会管理。
自2010年3月推出第一个发行版Box Turtle以来,ROS以每年1~2个版本的频率发布多个版本。作为次级操作系统,ROS官方推荐在Ubuntu操作系统上运行,并与Ubuntu发布节奏同步,偶数年发布维护周期为5年的长期演进版本,奇数年发布维护周期为2年的普通版本。然而,在2019年并未发布新版本。ROS已发布的历史版本如表1-1所示。
1 设置安装源
为了安装ROS Melodic,首先需要在Ubuntu 18.04 LTS上添加安装源到source.list,方法如下:
国外的:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

国内的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
清华的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
2 添加秘钥
2.1 添加秘钥
添加秘钥到本地的trusted数据库中并加以验证,方法如下:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
若密钥服务器hkp://ha.pool.sks-keyservers.net:80无法添加成功,则可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80。

2.2 安装公钥
在更新之前,需要安装公钥,否则无法验证签名,这一步也是原书没有的,需要朋友们注意,命令如下:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654

3 安装
sudo apt-get update

sudo apt-get install ros-melodic-desktop-full

sudo apt-get install ros-melodic-rqt*

4 初始化rosdep
这一步或多或少因为在国内都会出现网络问题,参考以下文章:
Ubuntu 18.04 安装 ROS Melodic 中 sudo rosdep init 和 rosdep update 一定能成功的方法
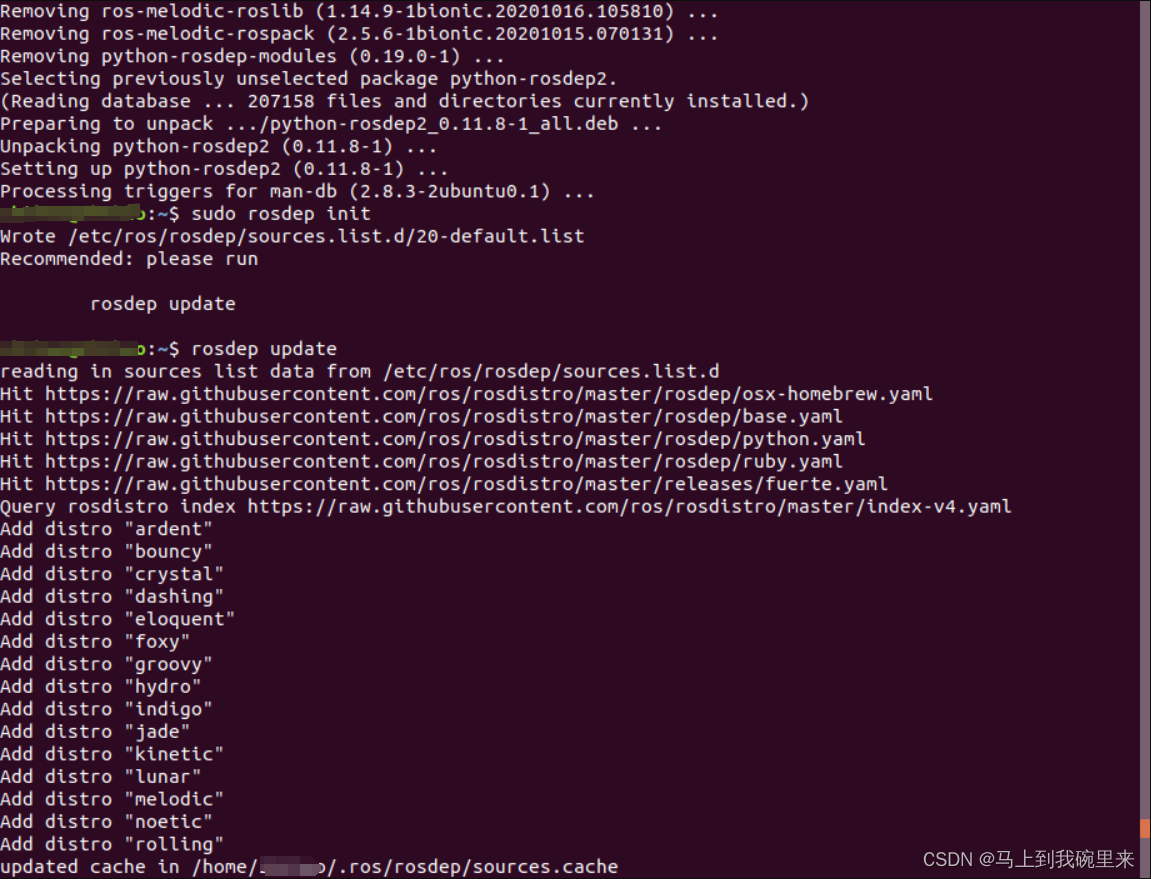
尝试直接科学上网测试也不行,最终不知道怎么的多试了几次就ok了。
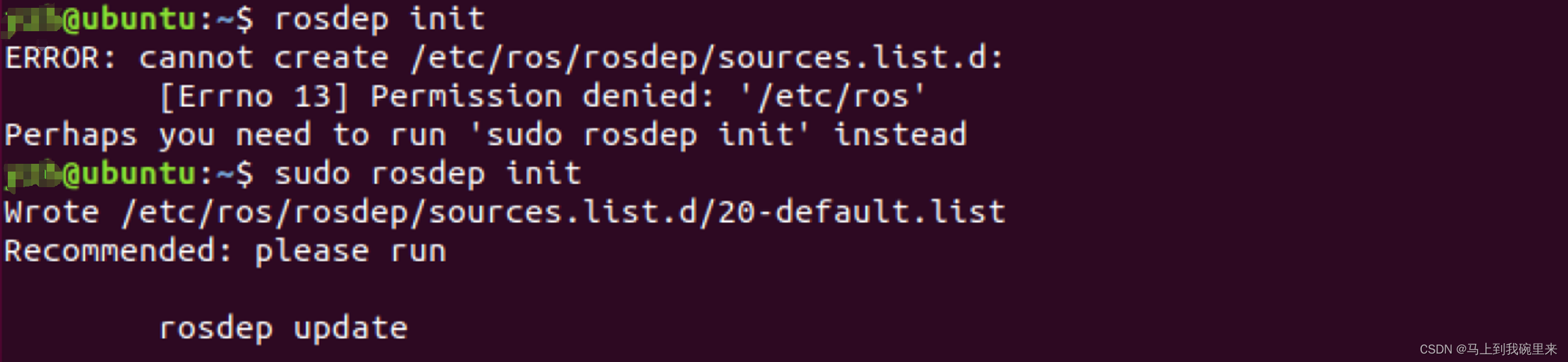
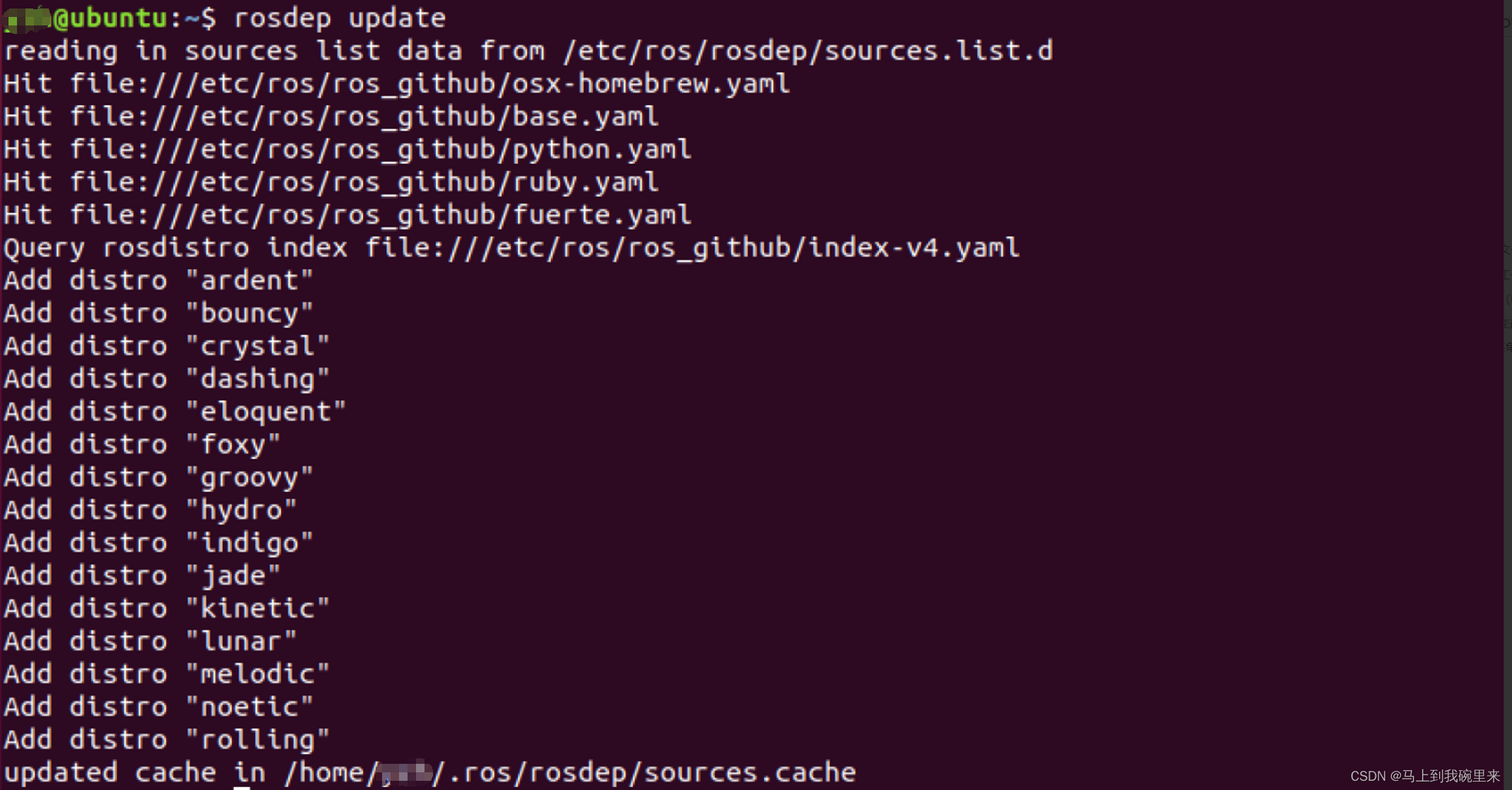
当显示rosdep update就基本成功了,接下来:
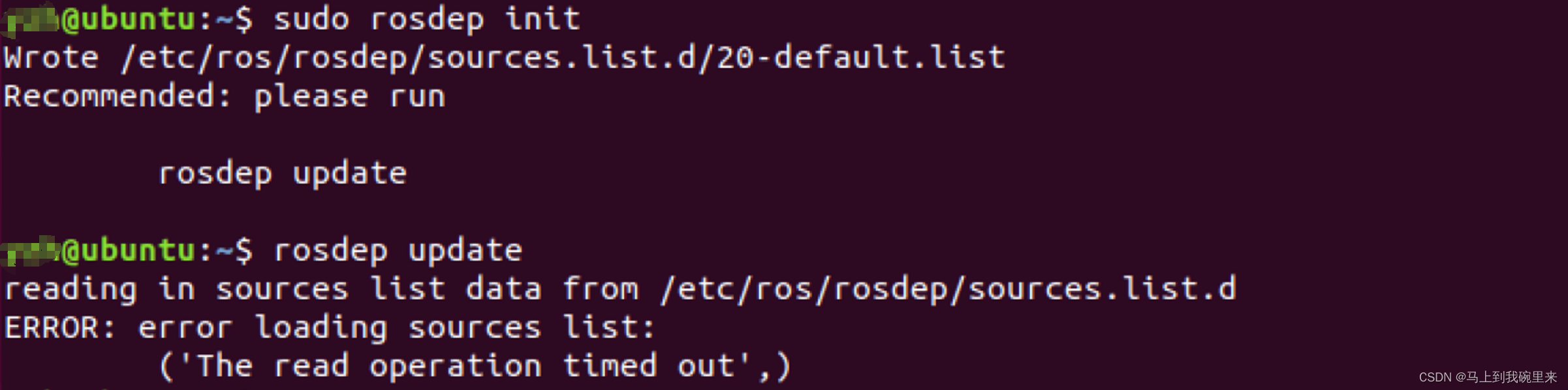
这个错误就是网络问题造成的,理论上换成手机热点就可以。但还是要多试几次。
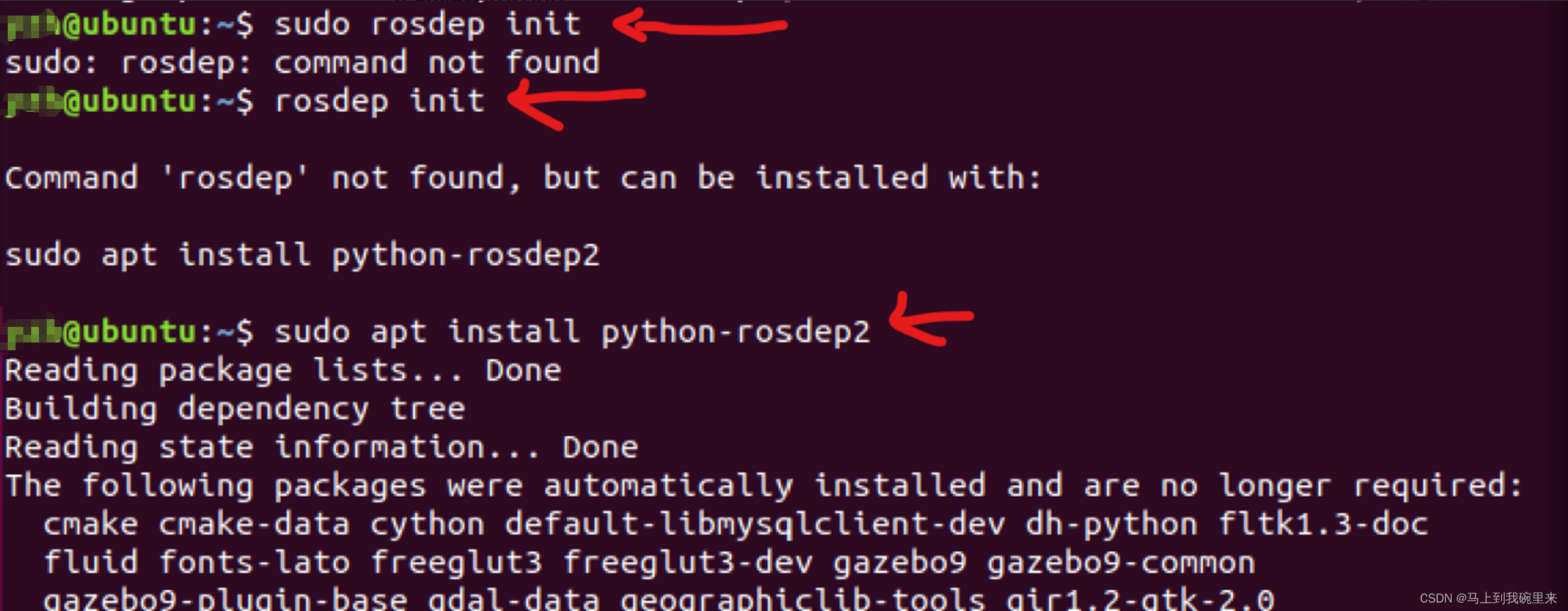
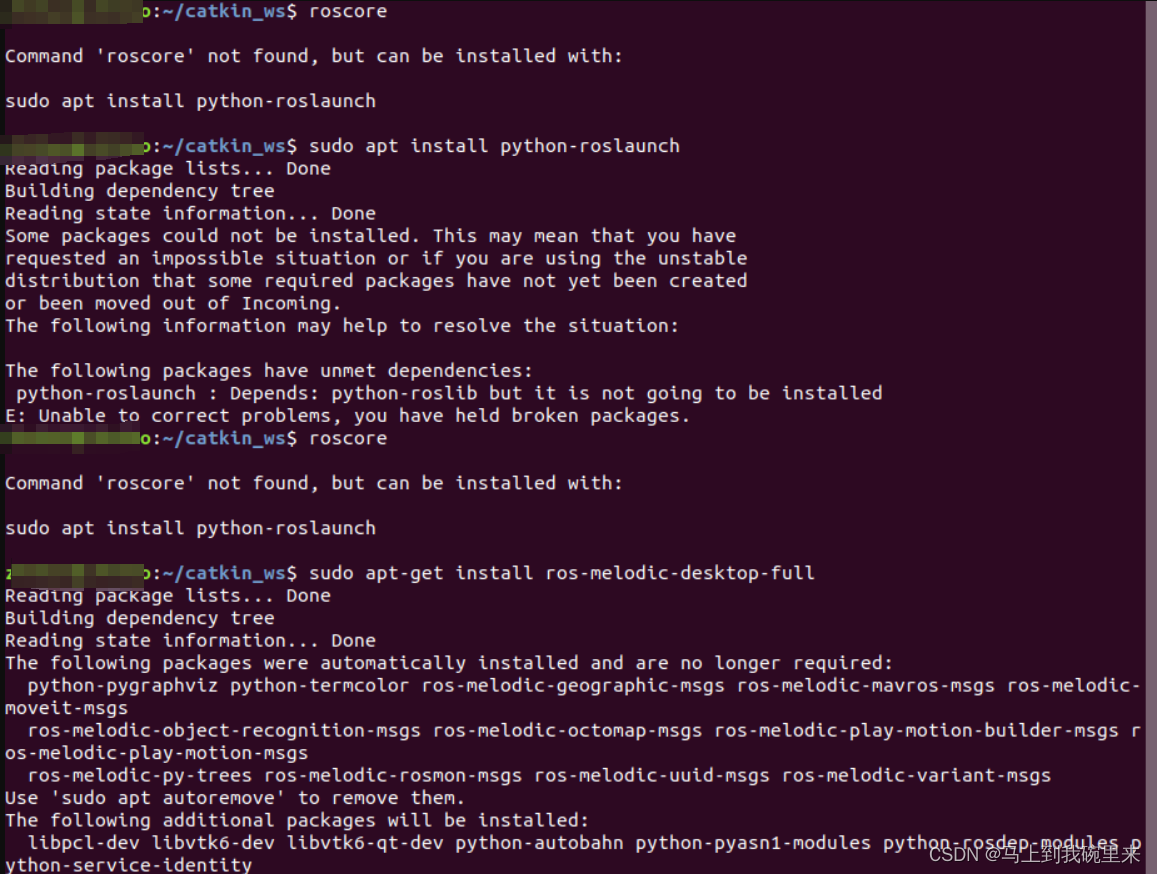
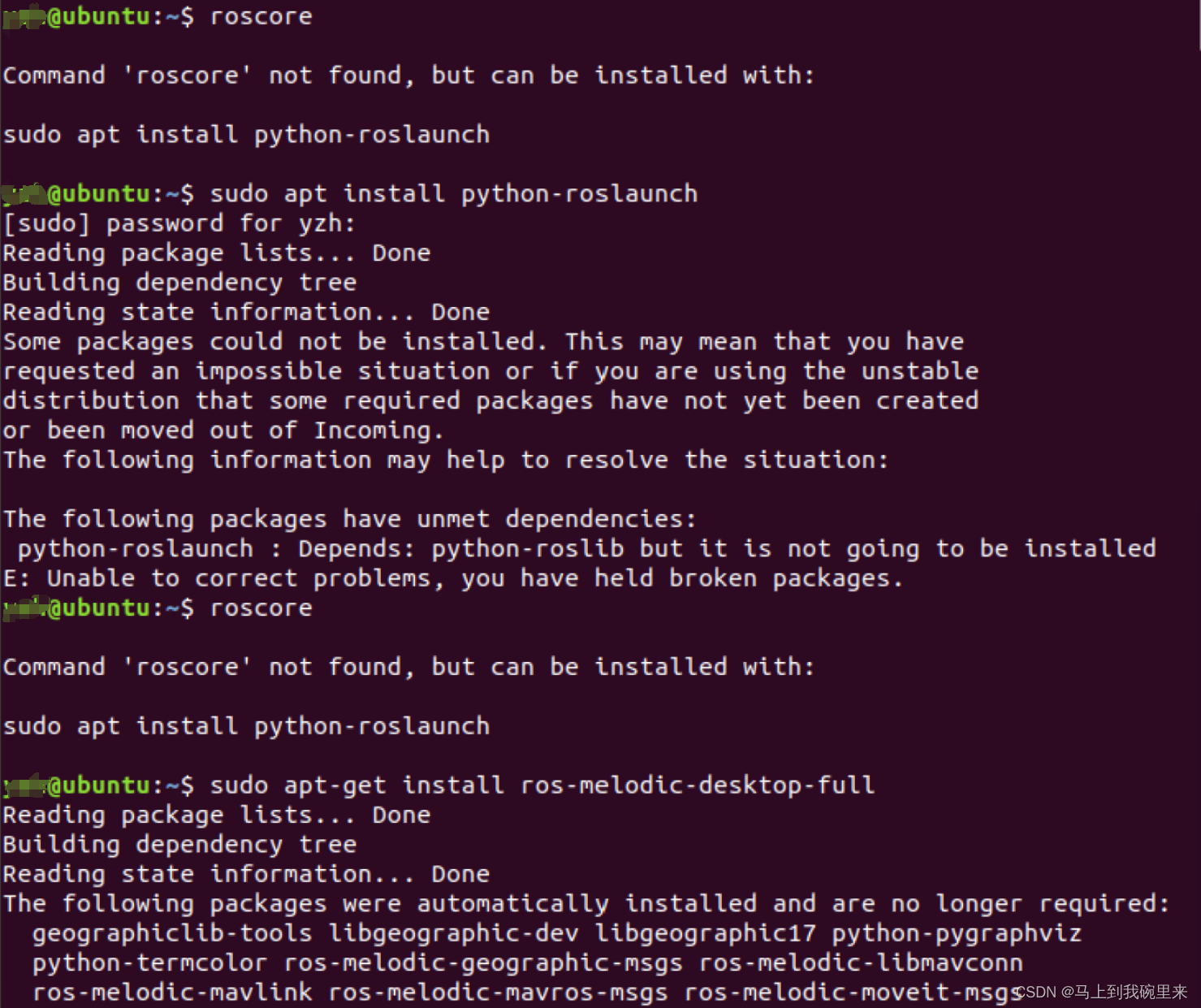
💡 当执行sudo rosdep init,反馈没有该指令。我在网上查找的一个方法是:在终端输入rosdep init,终端提示安装"sudo apt install python-rosdep2 " ,按照提示安装后,确实可以执行sudo rosdep init。但是sudo apt install python-rosdep2会导致之前sudo apt-get install ros-melodic-desktop-full安装的包部分丢失(这是后面才意识到的问题),执行楼主所有步骤后,发现没有roscore这个指令,所以还要重新执行sudo apt-get install ros-melodic-desktop-full,就有roscore指令了。
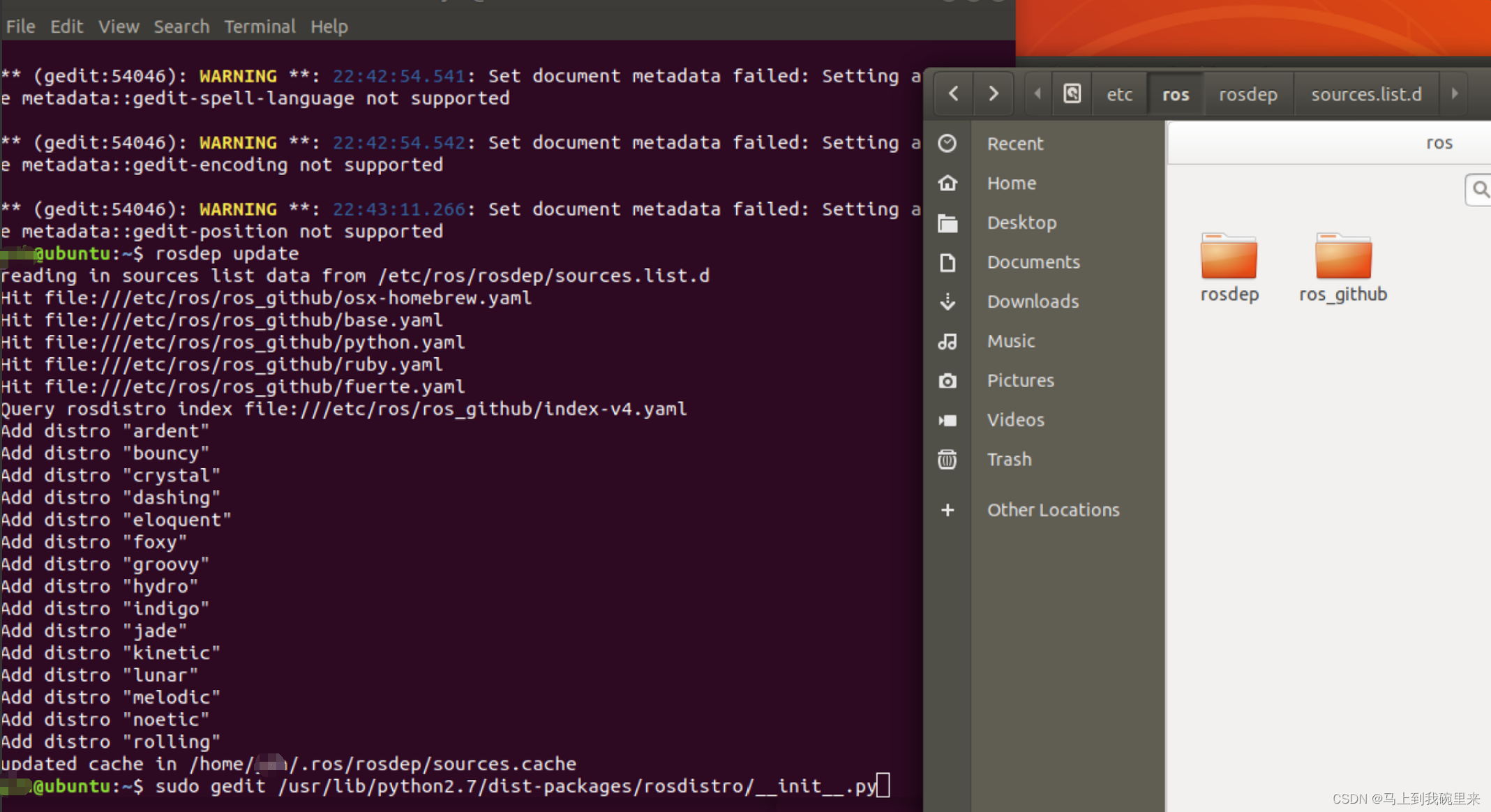
添加右侧的文件夹,然后改动rosdep中的文件链接地址为本地,然后改动init的py文件为本地即可。
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/**init**.py
5 安装rosinstall
sudo apt-get install python-rosinstall

这一步并没有成功,但似乎也没有影响到后面的进展?
6 加载环境设置文件
source /opt/ros/melodic/setup.bash

7 创建并初始化工作目录
ROS使用一个名为catkin的ROS专用构建系统。为了使用它,用户需要创建并初始化
catkin工作目录,如下所示。除非用户创建新的工作目录,否则此设置只需设置一次。
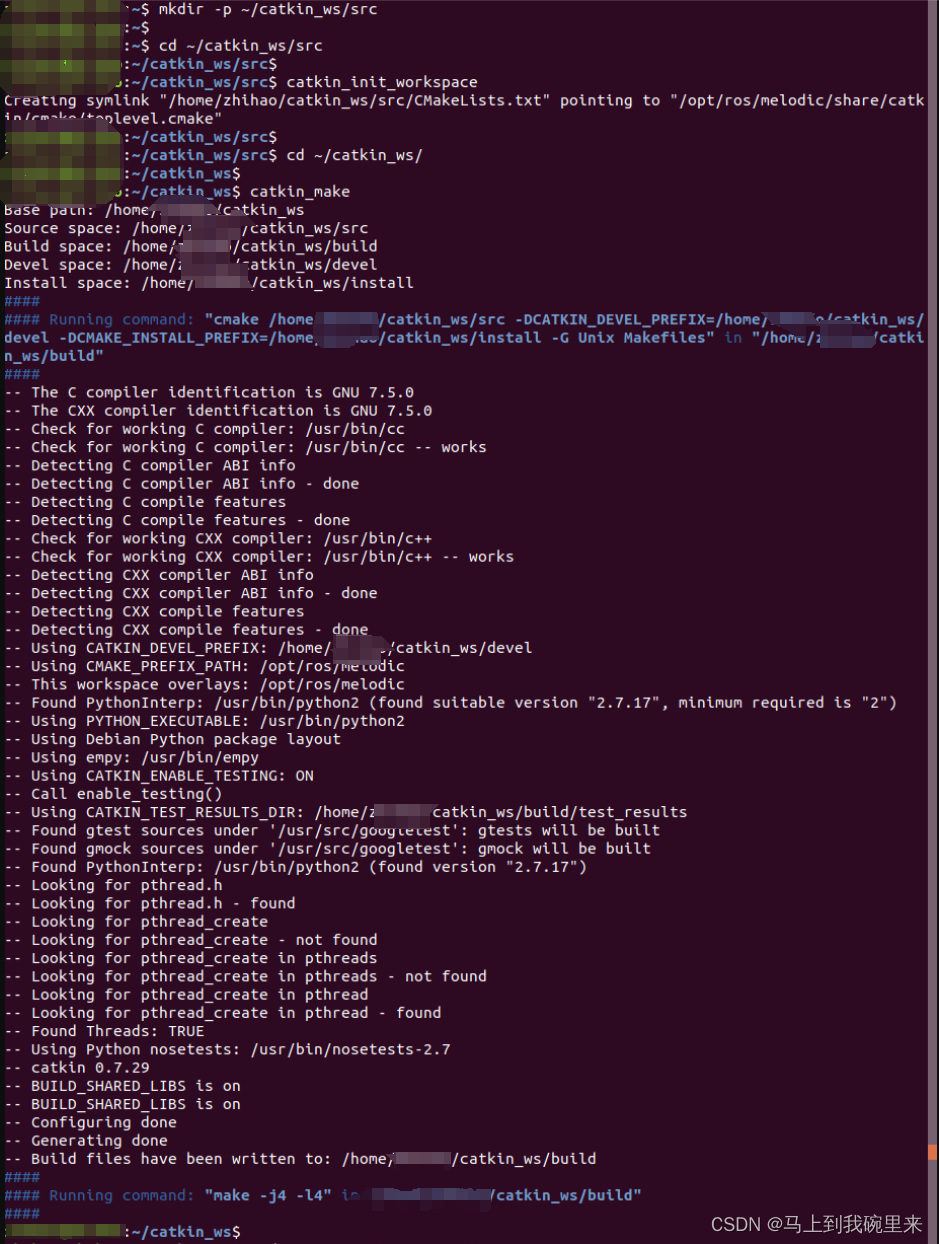
mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspace
目前,只有src目录和CMakeLists.txt文件在catkin工作目录中,使用catkin_make命令来构建
cd ~/catkin_ws/catkin_make
8 设置环境变量(略过)
sudo apt install net-tools
gedit ~/.bashrc
这里操作过程中直接跳到了下一步,并没有用,需要注意!
# Set ROS melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash# Set ROS Network
#ifconfig查看你的电脑ip地址
export ROS_HOSTNAME=192.168.89.135
export ROS_MASTER_URI=http://${ROS_HOSTNAME}:11311# Set ROS alias command 快捷指令
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_ws/src'
alias cm='cd ~/catkin_ws && catkin_make'

💡 当执行sudo rosdep init,反馈没有该指令。我在网上查找的一个方法是:在终端输入rosdep init,终端提示安装"sudo apt install python-rosdep2 " ,按照提示安装后,确实可以执行sudo rosdep init。但是sudo apt install python-rosdep2会导致之前sudo apt-get install ros-melodic-desktop-full安装的包部分丢失(这是后面才意识到的问题),执行楼主所有步骤后,发现没有roscore这个指令,所以还要重新执行sudo apt-get install ros-melodic-desktop-full,就有roscore指令了。
9 配置ROS环境变量
第八步的操作确实是有点迷(第八步确实有用,在roscore没反应的时候,需要重新执行一次最开始的sudo apt-get install ros-melodic-desktop-full),所以就直接跳过了,这里的操作也可以直接用。
默认情况下,ROS_HOME的路径为"~/.ros",该目录保存着日志文件和测试结果文件。另外,第一次启动ROS时,需要进行环境变量配置,命令如下:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
这两条指令相当于Windows系统中设置环境变量path,即在终端可以自由使用ROS系统指令,这里强调是系统指令,而不是自己创建的包或者节点,后者是需要使能相应的工作空间,具体可以参考:ROS工作空间。
查看环境变量是否设置正确,命令如下:
env | grep ROS
笔者查看环境变量结果如下:
ROS_ETC_DIR=/opt/ros/melodic/etc/ros
ROS_ROOT=/opt/ros/melodic/share/ros
ROS_VERSION=1
ROS_PYTHON_VERSION=2
ROS_PACKAGE_PATH=/opt/ros/melodic/share
ROS_DISTRO=melodic
至此,ROS的核心程序包安装完毕。
然后按下图执行命令:
10 启动运行小海龟例子
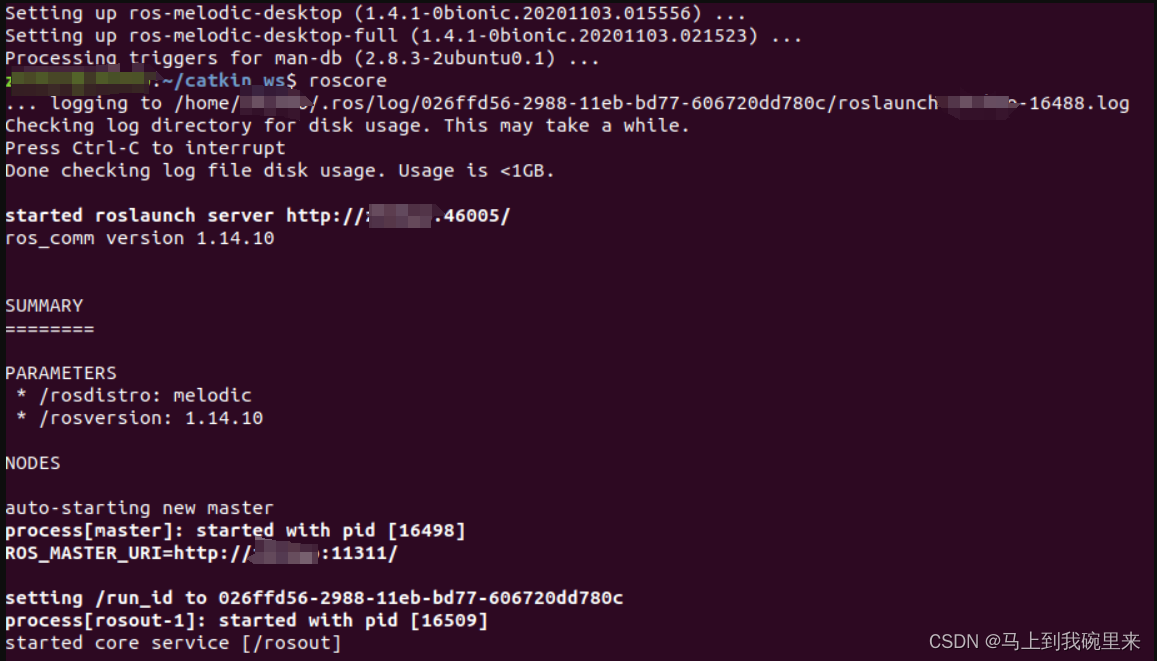
1.第一个终端运行如下命令
roscore

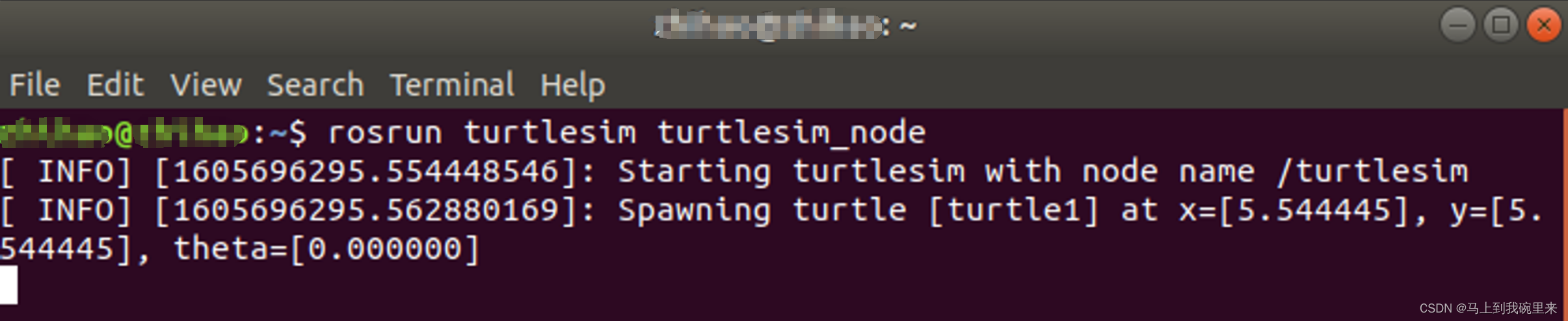
2.打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
rosrun turtlesim turtlesim_node
3.如果希望小海龟能够移动,打开第三个终端,利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key
11 小结
时至今日,已经不再用上述如此复杂的方式来配置环境,但是希望这个过程可以给有需要的朋友一点启发和帮助。
Reference
ubuntu18.04安装ROS Melodic(最详细配置)
Ubuntu 20.04安装Ros Noetic及Ubuntu 18.04安装ROS Melodic(两版本详细填坑)
Ubuntu18.04安装ROS Melodic(详细,亲测安装完成,有清晰的截图步骤)
这篇关于环境配置:Ubuntu18.04 ROS Melodic安装的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








