carsim专题

【自动驾驶】控制算法(八)横向控制Ⅱ | Carsim 与 Matlab 联合仿真基本操作
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

基于carsim的线控转向仿真(2)--齿条力观测
观测器更详细的介绍文章可以关注博主以下两篇文章 从小车倒立摆系统看系统建模控制LQR+LQE仿真_lqr平衡小车仿真模型-CSDN博客 好玩的直流电机调速实验、PID、极点配置、LQR、观测器;不讲大道理_观测器极点配置-CSDN博客 三个实例迅速掌握经典卡尔曼滤波用法_卡尔曼滤波 温度估计-CSDN博客 本篇文章中,博主使用matlab提供的kalman函数,进行观测器设计。 一、系统

基于carsim的线控转向仿真(1)--carsim车辆模型目标角度跟踪
一、Rwa转向执行总成建模 Rwa包括齿轮齿条机构、转向组件以及转向执行电机;如下图,电机输出轴通过齿轮减速增扭后,再经过一个半径为rp的小齿轮,直接带动齿条左右移动。齿条的移动通过转向摇臂,带动车轮转动,整套系统从电机的转动,转换为齿条的左右移动,再转换成车轮的左右摆动。 1、转向电机建模 在线控转向中,转向电机是一个执行器,上层给多少需求力矩,电机控制器便响应多少力矩。这里,我们用
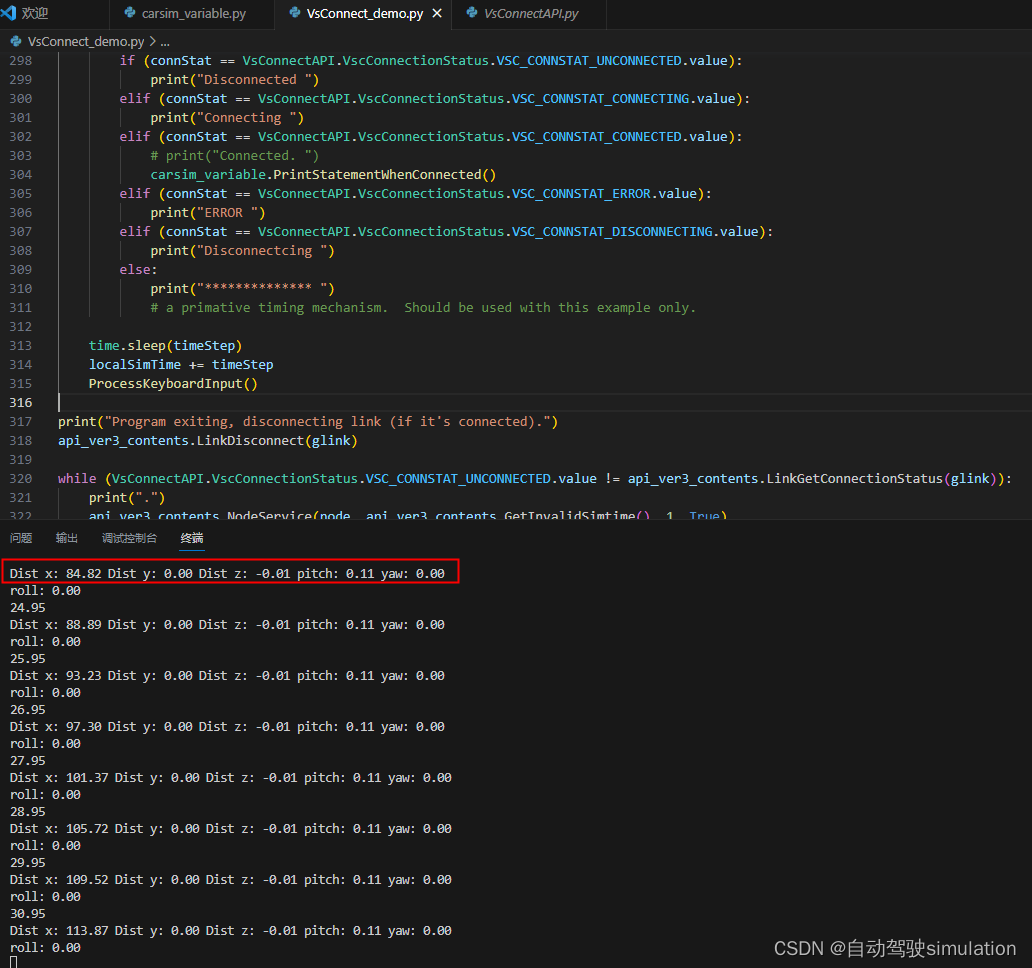
Carsim高级开发:VS Connect通讯开发指南
文章目录 前言一、VS Connect 概念引入二、VS Connect 通讯框架三、Carsim 工程配置1、车辆模型配置2、procedure配置3、Run Control配置4、受控车辆名称配置 四、VS Connect Server代码1、打开Sln工程2、代码修改 五、VS Connect Client代码1、函数的调用关系2、carsim_variable代码3、VsConnec

carsim安装问题总结
由于某些原因,安装carsim软件一直安装不成功。后来看了YouTube的视频。 下载链接为:http://getintopc.com/softwares/simulators/carsim-2017-free-download/ 视频链接为:http://unique-tutorials.info/how-to-install-carsim-2017-without-errors-2/ y

carsim2016和matlab2016b的联合仿真,找不到carsim s-function的解决办法
转载:https://blog.csdn.net/ERTFYANG/article/details/79791060 本人是一个carsim的初学者,使用的是网上关于ABS的那个例程。但是跟着教程做到联合仿真的那一步的时候,遇到了题目中的问题。 解决步骤: 1、将carsim的求解器sloves的文件目录加载到matlab的路径中去 2、将matlab的默认工作目录设置为carsim中si
CarSim 2016安装破解教程
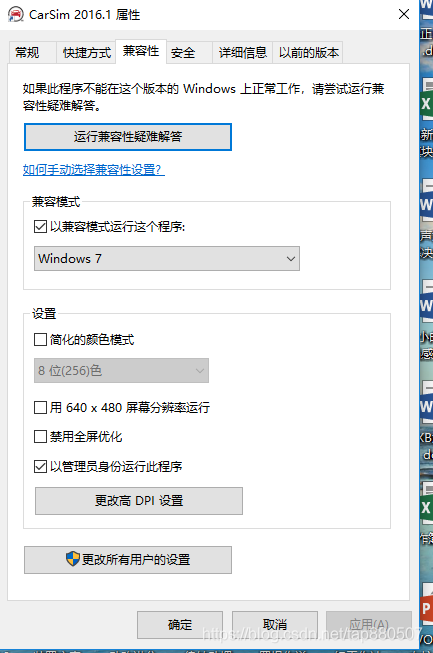
1、运行“Setup_CarSim_2016.1_r20961.exe”开始安装 2、点击NEXT 3、选择安装功能 4、等待安装完成,安装完成后选择NODE LOCK 5、打开破解文件“_SolidSQUAD_”,将其中的CarSim2016.1_Prog覆盖源文件夹 6、以管理员方式运行“SolidSQUADLoaderEnabler.reg”载入注册表 7、运行“Mechanical.Sim

基于单点预瞄的轨迹跟踪控制算法研究 算法是基于simulin k和carsim联合仿真的 ,算法可以实现高速下准确的跟踪参考路径具有一定的鲁棒性和适应性
基于单点预瞄的轨迹跟踪控制算法研究 算法是基于simulin k和carsim联合仿真的,适合新手学习入门,算法可以实现高速下准确的跟踪参考路径具有一定的鲁棒性和适应性 版本carsim8.02matlab2016b ID:6530623518262519xhusj
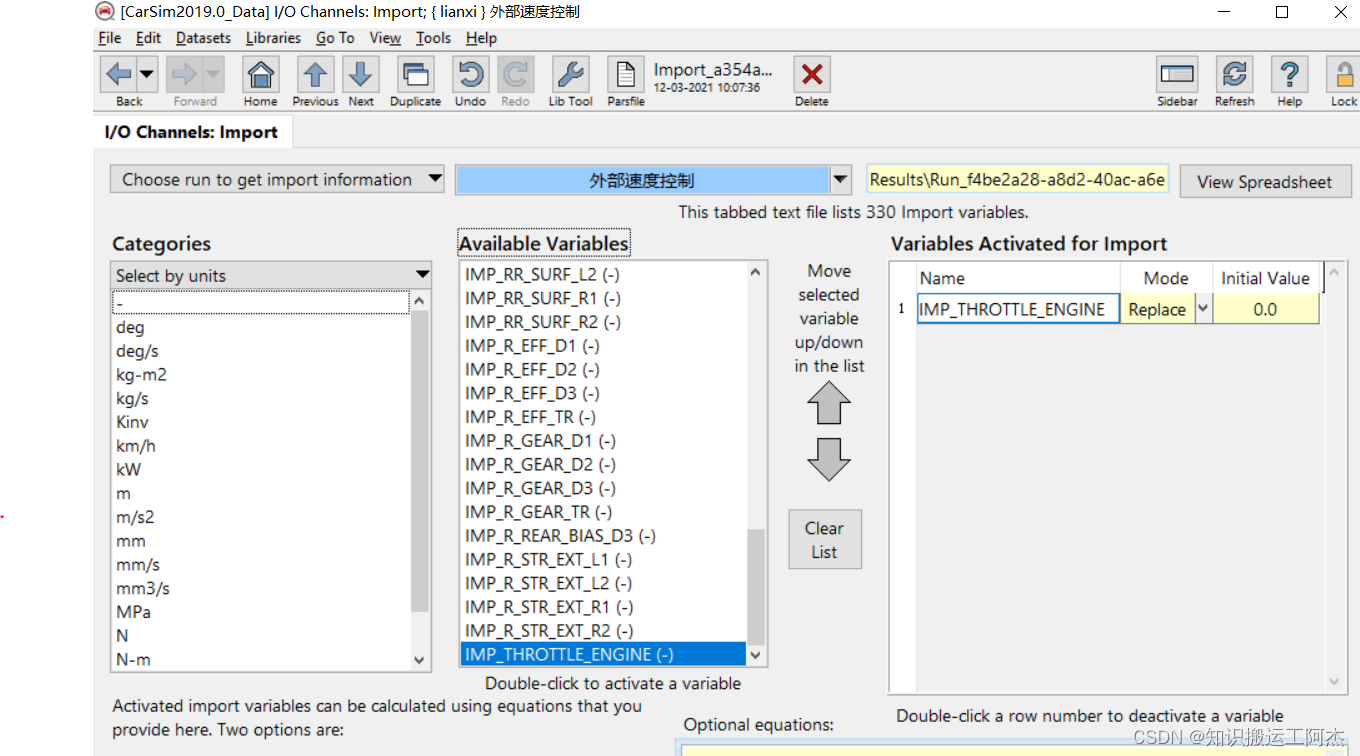
外部控制carsim速度及节气门
1.外部速度控制 首先carsim 这样在produce设置 然后需要输入代码 外部输入设置 可以看到曲线并不稳定 在carsim输入端输入初速度就会变得平滑 2.节气门设置 有两个方法设置外部节气门开度,根据你的具体情况,自己选择。

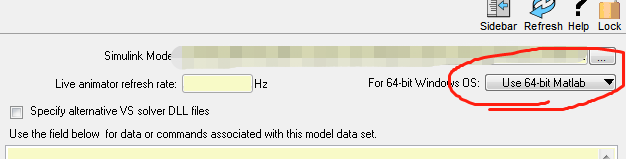
Matlab2020和Carsim2019联合仿真,Carsim提示matlab not found问题解决办法(各版本均适用)
由于之前装了好几个版本的matlab,而carsim只默认第一次安装的matlab,这就导致carsim中send to simulink直接报错error:matlab not found。 即使卸载了matlab2016版本,carsim还是无法识别到matlab2020b。 试了网上的 -regserver,完全没有用,这种办法应该适用于装上了matlab但是没成功注册COM的情况。
carsim与simulink联合仿真遇到的问题
1、carsim和simulink联合仿真的时候,刚开始的输出量有可能是0;所以在simulink模型里边尽量不要设置数据=0;>=0;<=0的时候停止仿真,结果容易只有一个数据,还不给报错,还不太容易被发现。 2、在联合仿真点击完send to simulink后会出现simulink的模型。和一个比较单一的MATLAB命令窗口,在命令窗中输入desktop,会弹出功能比较多的那个 窗口,很多仿
Carsim和Simulink四轮转向联合仿真时后轮转角无法输入解决方法
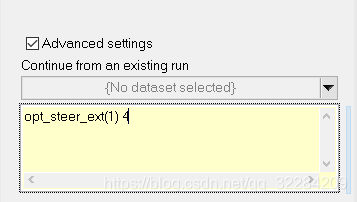
联合仿真时simulink计算出的后轮转角无法被Carsim接收到,此时需要在Carsim软件中输入opt_steer_ext(1) 4即可 如图。

Carsim Tiretester使用说明
1.选择轮胎 如果没有轮胎的模型可以直接将S301里的轮胎模型parsfile文件复制粘贴过去创建一个新的轮胎文件。 2.设置试验工况 进入之后页面说明如下: 2.1设置扫描内容 sweep vertical load:扫描垂向载荷 Sweep slip angle:扫描侧偏角 Sweep slip ratio:扫描滑移率 Sweep inclination angle:扫描内
carsim与simulink联合仿真——轨迹跟随,车道保持,横向控制
carsim与simulink联合仿真——轨迹跟随,车道保持,横向控制 carsim的cpar文件导入即可使用 simulink的mdl模型文件支持自己修改 模型说明文件 ID:8145666153449184

carsim与simulimk联合仿真大合集 横向控制,轨迹跟随,车道保持 基于pid的轨迹跟随联合仿真模型
carsim与simulimk联合仿真大合集!! LKA,车道保持 横向控制,轨迹跟随,车道保持: 基于pid的轨迹跟随联合仿真模型 基于单点预瞄的轨迹跟随联合仿真模型 基于多点预瞄的轨迹跟随联合仿真模型 基于模糊PID的轨迹跟随联合仿真模型 基于预瞄跟随+滑模变结构控制的轨迹跟随联合仿真模型 基于预瞄+滑模变结构+模糊控制+预瞄距离自适应的轨迹跟随联合仿真模型 基于MPC的极限

Carsim与simulink联合仿真模型 基于MPC工具箱的轨迹跟随,横向控制,车道保持
Carsim与simulink联合仿真模型 基于MPC工具箱的轨迹跟随,横向控制,车道保持 ID:6950671739985661多不多啦米

carsim和simulink联合仿真 ACC
1目标车辆模型搭建 设Car1为目标车辆,也就是主车的目标车辆,在其车辆模型参数设置板块中,选择CarSim软件中的B-Class,Sport Car为基准车。 进入B-Class,Sport Car参数设置。其中的车辆模型参数设置主要是对车身、仿真动画、动力系统、制动系统、转向系统、前后悬以及车轮的选型及参数设置。在动力传动系统设置中,目标车辆的动力系统设置为传统传动系统,如图所示,使用内部引擎
Carsim和simulink联合仿真车轮胎侧偏刚度估计 使用的算法:递归最小二乘法RLS算法
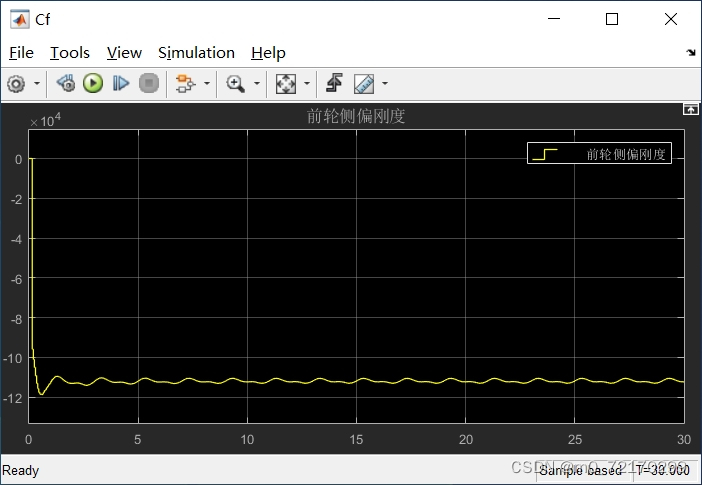
Carsim和simulink联合仿真车轮胎侧偏刚度估计 使用的算法:递归最小二乘法RLS算法 测试的工况: 正弦工况,不同车速 估计的参数为:前轮和后轮的侧偏刚度 s函数写的代码,主流建模方式,不需要繁杂的模块调试模型觉得卡尔曼滤波和状态空间方程编程清晰明了,精度很好 simulink里面是算法模型,carsim提供了实车数据,相对于simulink搭建的七自由度车辆验证模型,carsim更具有
轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真
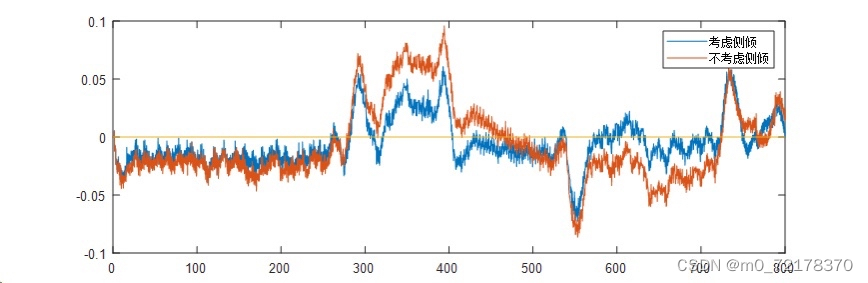
轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真 ID:73100674012393406hjm7

Carsim-与Simulink联合仿真时车辆穿模?(1)
目录) 简介整个Demo流程如下:1. 复制一个已有的demo2. 修改Demo所属Dataset和名称2.1 在Carsim的`Procedure - 3D Road - 外部 Path 导入`一栏已经默认导入`Vs Scene Builder`生成的地图文件(`.vsscene`文件),此时不用进行修改。 3. 不用Simulink,直接点击`Run Math Model`后,生成的Vi
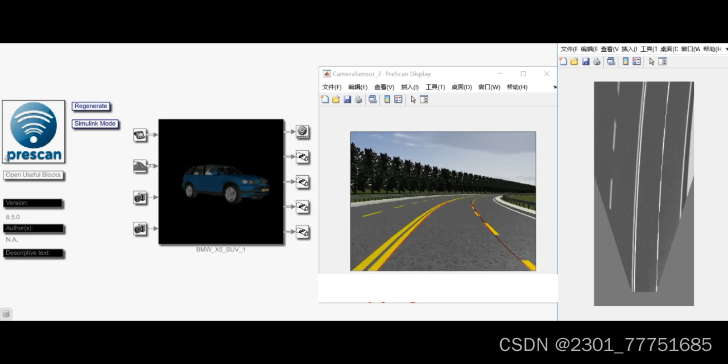
基于PreScan与Carsim的车道保持联合仿真
基于PreScan与Carsim的车道保持联合仿真 其中车道线识别算法通过采集单目摄像头数据,Ransac算法提取车道线;采用MPC控制器实现车道保持与循迹控制。 内附PreScan、Carsim与Simulink模型,有相关报告和参考文献 ID:63180675501838390

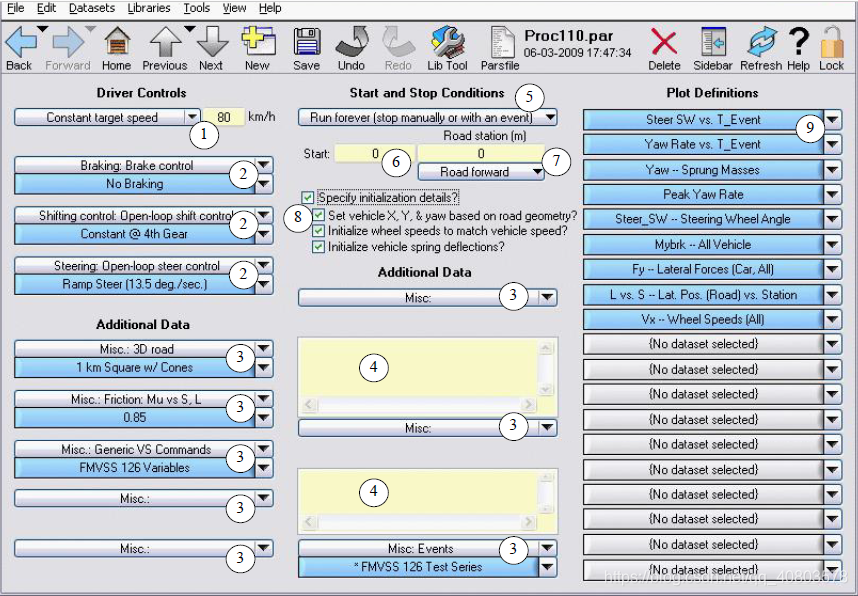
carsim仿真过程变量设置
procedure:仿真过程设置主要包括驾驶员模型,道路,启动和停止条件,与程序相关联的绘图,以及可能更多的信息,如道路和风力输入,事件,动画信息等;依次打开后可以看到带有数字的界面。 ①速度、加速度设置:初速度,油门;开环节气门控制;恒速;目标速度和时间关系;目标速度和位置关系;没有特殊速度控制。