本文主要是介绍Carsim和Simulink四轮转向联合仿真时后轮转角无法输入解决方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
联合仿真时simulink计算出的后轮转角无法被Carsim接收到,此时需要在Carsim软件中输入opt_steer_ext(1) 4即可
如图。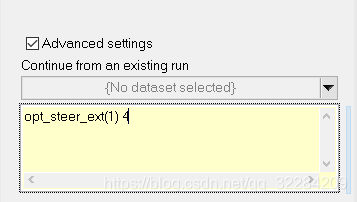
这篇关于Carsim和Simulink四轮转向联合仿真时后轮转角无法输入解决方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍Carsim和Simulink四轮转向联合仿真时后轮转角无法输入解决方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
联合仿真时simulink计算出的后轮转角无法被Carsim接收到,此时需要在Carsim软件中输入opt_steer_ext(1) 4即可
如图。
这篇关于Carsim和Simulink四轮转向联合仿真时后轮转角无法输入解决方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/499682。
23002807@qq.com






