四轮专题
如何设计一款四轮智能小车
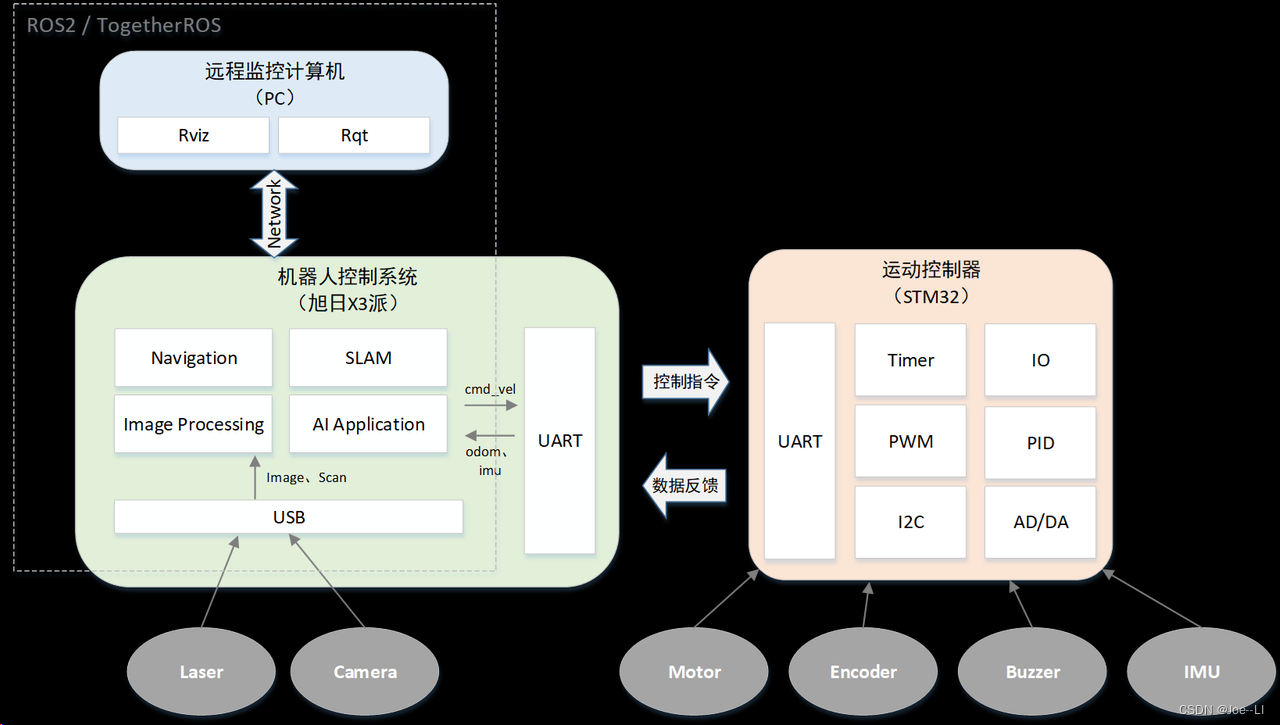
此部分共分为五个小节,通过这个 Part 的学习,我们将了解机器人的概念和组成,对机器人的整体设计有一个明确的思路,然后通过机械结构、驱动系统、传感系统、控制系统四大组成部分,展开介绍设计一款智能小车的基本思路。 通过这一讲课程,我们希望大家脑海中能够对智能小车有一个明确的认识和开发思路,未来我们再逐个击破,把它一点一点做出来。 总体设计思路 从控制的角度来讲,机器人可以划分为图中四大组成部
Carsim和Simulink四轮转向联合仿真时后轮转角无法输入解决方法
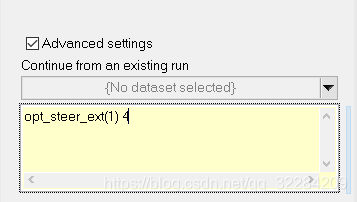
联合仿真时simulink计算出的后轮转角无法被Carsim接收到,此时需要在Carsim软件中输入opt_steer_ext(1) 4即可 如图。

分享一套开源充电桩云平台(v2.5.1)-- 支持二轮(电动自行车)、四轮(电动汽车)
开源充电桩云平台(v2.5.1) 支持二轮(电动自行车)、四轮(电动汽车) 后台体验地址 二轮后台体验地址,star star : 点我访问 四轮后台体验地址,star star : 点我访问 用户端二维码 公众号二维码 小程序二维码 一,平台简介 开源充电桩云平台(含硬件充电桩)(v2.5.1)包括了前端uniapp(公众号、H5、小程序)、采集端、运营
四轮独立驱动电动汽车,四轮侧偏刚度估计,四电机模型
四轮独立驱动电动汽车,四轮侧偏刚度估计,四电机模型,carsim输出真实值,ckf估计侧偏刚度,由s函数编写 ID:84300703713666725

四轮两驱小车(三):STM32驱动MPU6050进行转弯
前言: 寒假已经过了一半了,前段时间跟学弟一起从零开始搞了一下深度学习,现在才想起来这个系列还没有更完。本篇博客主要介绍一下这个小车转直角弯的神器----MPU6050 MPU6050介绍: 我所采用的MPU6050是某宝上十几块钱的这种,这种MPU6050有个缺点是带有零点漂移,这个接下来我会在博客里给大家提供我的解决方案,优点显而易见是便宜,如果坏了也不心疼,
基于计算机视觉的定位服务原理,基于计算机视觉的汽车四轮定位技术研究
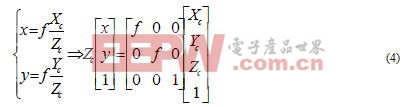
同理,可以求出转动角度θ后的 和α,由α、L1和d进而求出θ。 由以上过程求出距离、成像尺寸及空间旋转角度。 1.3 定位参数求取 此方法目标盘上一般选择圆作为规则图形,这是因为圆具有独特的几何特性,是进行相关参数计算最理想的图形。它是轴对称图形,也是中心对称图形;定位时以车轮轮轴所确定的三个相互垂直平面为定位基准:车身平面、轮轴平面、车轮平面。轮轴平面是主销后倾的基准面;车轮平面是前束角、外倾

汽车底盘调校 四轮定位
开车的朋友一定对“四轮定位”这个词并不陌生。一台比举升机稍微复杂一些的设备、显示着奇奇怪怪正负数字的电脑、技师在车底翻来覆去的摆弄,所谓“定位”就完成了,那么,所谓的“四轮定位”究竟“定”了什么?我们一起来聊聊,做个明白人。 简单而言,“车轮定位”就是通过一些参数来精确定位车轮与转向节、车架之间的相对位置,以实现更理想的车辆直线行驶稳定性、转向便利性(转向轮)及减小轮胎和机件的