本文主要是介绍基于计算机视觉的定位服务原理,基于计算机视觉的汽车四轮定位技术研究,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
同理,可以求出转动角度θ后的 和α,由α、L1和d进而求出θ。
由以上过程求出距离、成像尺寸及空间旋转角度。
1.3 定位参数求取
此方法目标盘上一般选择圆作为规则图形,这是因为圆具有独特的几何特性,是进行相关参数计算最理想的图形。它是轴对称图形,也是中心对称图形;定位时以车轮轮轴所确定的三个相互垂直平面为定位基准:车身平面、轮轴平面、车轮平面。轮轴平面是主销后倾的基准面;车轮平面是前束角、外倾角及主销内倾角的基准面。
当目标的实际尺寸已知,而摄像机处观测点至目标的距离、成像尺寸和转动角度求出后,可以通过计算得出定位参数数据。
用夹具将目标盘以一定角度安装在车轮上,当车辆前后移动时,车轮及目标盘一起前后转动,通过对目标盘上圆沿其纵轴旋转情况进行检测,可检测出前束角的情况;同时,这一过程中目标盘的对称线将形成一组矢量曲面,转动前后目标盘的两条对称线之间夹角叫矢量角。通过矢量角,可计算出车轮外倾角的情况[4](如图4(a)所示)。
在车辆静止时,(如图4(b)所示),使车轮与目标盘向左或向右转动,检测盘面上圆绕其纵轴的旋转情况可检测出主销内倾角情况;检测圆沿其横轴旋转情况,可检测出主销后倾角的情况。

这种方式原理上比较简单,为国外专利技术,虽对目标盘上图案形状等有一定要求,但推导计算过程简捷而巧妙,容易实现快速的定位,且对定位平台没有严格要求。
2、基于空间向量的方式
该方法为通过对安装在车轮上的目标盘(带有规则斑纹)进行运动前后的拍摄,然后进行图像处理和分析提取出目标盘上的特征点,再根据特征点位置在空间坐标上的变化计算出车轮的空间旋转向量,进而由该向量与空间坐标系各坐标轴夹角关系得出定位参数。
2.1 参考坐标系
计算机视觉中,需要用到世界坐标系、摄像机坐标系和图像坐标系三种坐标系。
世界坐标系(Xw,Yw,Zw)是在环境中选择的一个基准坐标系,用来描述摄像机位置,可以根据描述和计算方便等原则自由选取。对于有些摄像机模型,选择适当的世界坐标系可大大简化视觉模型的数学表达式。
摄像机坐标系(Xc,Yc,Zc)以摄像机镜头光心Oc为坐标原点,Xc,Yc轴平行于成像平面,Zc轴垂直于成像平面,其交点在图像坐标系上的坐标为(u0,v0),即摄像机主点。
图像坐标系是定义在二维图像上的直角坐标系,分以像素为单位和以物理长度(如毫米)为单位两种,这里分别用(u,v)和(x,y)来表示,如图5所示。最常用的是以像素为单位的坐标系,通常其坐标原点一般定义在图像的左上角。
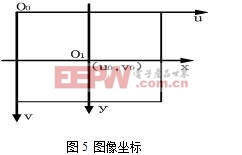
设摄像机CCD每个像素在X轴与Y轴方向上的物理尺寸为dx,dy(该参数由摄像机厂家提供,是已知参数,其比值dy/dx称为Aspect Ratio,即纵横比),由图5可知图像上像素值(u,v)与坐标(x,y)之间的关系是 , ,用齐次坐标与矩阵表示为式(3)。

2.2 摄像机模型
针孔模型是由小孔成像原理推导出来的,是在简单的中心射影(又叫透视投影)基础上加入刚体变换(刚体的旋转与平移)得到的线性摄像机模型。它不考虑各种镜头的畸变,然而它却能很好的模拟实际摄像机,是其它模型和标定方法的基础。
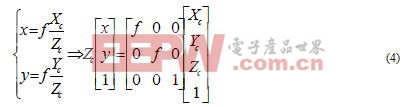
设P是空间某点,其在摄像机坐标系下坐标为(Xc,Yc,Zc);q是P成像平面上的对应点,q的坐标为(x,y),设f为摄像机焦距,则根据透视投影的比例关系为式(4)。
这篇关于基于计算机视觉的定位服务原理,基于计算机视觉的汽车四轮定位技术研究的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






