本文主要是介绍轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
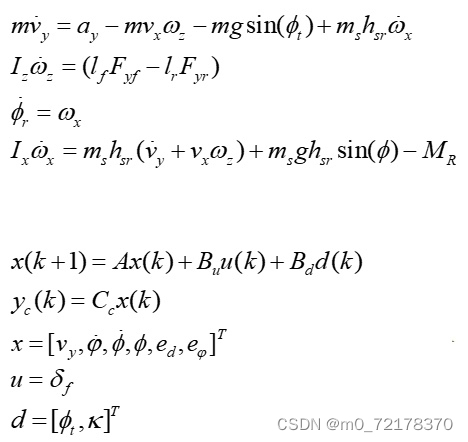
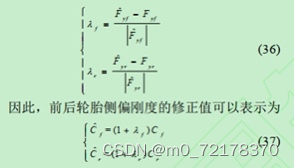
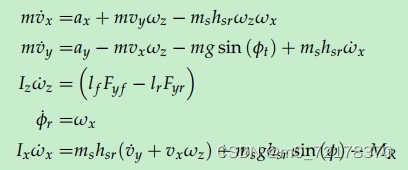
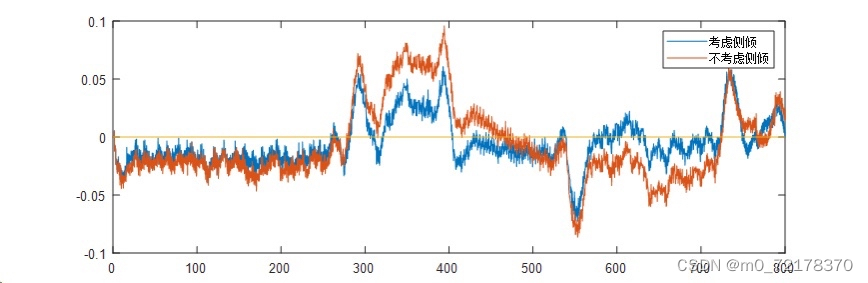
轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度
simulink carsim联合仿真
 ID:73100674012393406
ID:73100674012393406 hjm7
hjm7

这篇关于轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度
simulink carsim联合仿真
ID:73100674012393406hjm7
这篇关于轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/258268。
23002807@qq.com









