轨迹专题


全英文地图/天地图和谷歌瓦片地图杂交/设备分布和轨迹回放/无需翻墙离线使用
一、前言说明 随着风云局势的剧烈变化,对我们搞软件开发的人员来说,影响也是越发明显,比如之前对美对欧的软件居多,现在慢慢的变成了对大鹅和中东以及非洲的居多,这两年明显问有没有俄语或者阿拉伯语的输入法的增多,这要是放在2019年以前,一年也遇不到一个人问这种需求场景的。 地图应用这块也是,之前的应用主要在国内,现在慢慢的多了一些外国的应用场景,这就遇到一个大问题,我们平时主要开发用的都是国内的地

【PSINS】SINS与航位推算的EKF例程讲解|三维轨迹
文章目录 SINS与航位推算例程构造滤波前滤波主体滤波后处理 运行结果源代码 SINS与航位推算 SINS是捷联惯导,略。 航位推算: 本文讲解的程序是PSINS工具箱(相关文章:PSINS初学指导,https://blog.csdn.net/callmeup/article/details/136459824)的一个函数,在此基础上进行优化。如果要运行,需要先安装工具箱

【自动驾驶】控制算法(七)离散规划轨迹的误差计算
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作,荣幸在CSDN首发🐒 若您觉得内容有价值,还请评论告知一声,以便更多人受益。 转载请注明出处,尊重原创,从我做起。 👍 点赞、评论、收藏,三连走一波,让我们一起养成好习惯😜 在这里,您将

在Postgresql中计算工单的对应的GPS轨迹距离
一、概述 在某个App开发中,要求记录用户的日常轨迹,在用户巡逻设备的时,将记录的轨迹点当做该设备巡逻时候的轨迹。 由于业务逻辑上没有明确的指示人员巡逻工单-GPS位置之间的关系,所以通过时间关系进行轨迹划定。 二、创建测试表 首先创建测试表,包括用户表、工单表以及GPS轨迹表。 用户表 --用户表CREATE TABLE a_users (userid varchar NUL

机器人学——机械臂轨迹规划-2
直线轨迹 线段转折点速度不连续 加速度状态讨论 double dot 多段直线轨迹,转折点利用二次方程转为圆弧 关键步骤 第一个线段处理 Vt = V0 + at , 此处的V0 = 0 , 利用函数连续性,左右速度相等,联立求解 sgn(x):符号函数 最后一个线段处理 真实系统中的加速度影响因素 规划轨迹未通过via points 若通过
考研——生命轨迹中一段无法抹去的铿锵岁月
不少人说考研是痛苦的,很少有人说考研是快乐的。然而,无论是痛苦还是快乐,经历过的人都会把曾经的苦与乐看成是自己走向成熟的一段经历,一种克服人生困境的能力和一笔无形的宝贵财富。一路走来,学会了承受和容忍,也学会了坚强与坚持。多年以后,可能时光不在,但是记忆犹新。或许某一天,当闲暇追忆往事时,我依然会为选择考研而感觉亢奋与喜悦。因为那是一段为梦想而奋斗的日子,是人生美好的东西,值得珍惜。所以,感

animation+transform实现轨迹平移
之前通过animation+transtion实现平移,transtion通过定义left和top值来移动; 其中 animation是定义一个动画,可以通过百分数来定义每个时刻的状态 基本的需要: -webkit-animation-name: Aname; -webkit-animation-duration: 30s; 本次操作实现,太阳落山的轨迹,用了transform属性,可

python动画:实现目标的运动轨迹【paths】
一,介绍 在 Manim 库中,“路径(paths)”指的是一些功能函数,这些函数用于确定在点集之间进行变换时所需的路径。这些函数为动画制作提供了灵活性和表现力,使得物体在场景中的移动表现得更加生动和自然。 具体来说,路径函数能够根据给定的一组点,生成一条连贯的运动轨迹,控制物体在动画中的运动方式。例如,当你想让一个图形从一个位置移动到另一个位置时,简单的线性运动可能显得乏味,而使用路径函数则

基于OpenLayers实战地理信息系统(离线地图,通过基站转经纬度,Quartz深入,轨迹实战)
我这里有套课程想和大家分享,需要的朋友可以加我qq和我联系。QQ2059055336. 一、本课程是怎么样的一门课程(全面介绍) 1.1、课程的

Apollo9.0 PNC源码学习之Planning模块—— Lattice规划(七):横纵向运动轨迹的优选
参考文章: (1)Apollo6.0代码Lattice算法详解——Part 7: 获得最优轨迹 (2)Lattice算法详解 0 前言 // 优选出cost最小的trajectory// 7. always get the best pair of trajectories to combine; return the first// collision-free trajectory

【Simulink】使用简化机械臂系统动力学的抓取和放置任务及轨迹调度
abbSavedConfigs.mat 文件中的配置 文件中保存了多个关节角度配置,每个配置对应不同的机器人操作步骤。这些配置通常用于控制机器人在执行任务时的各个关键姿态和动作。 各个配置的功能解释: configSequence (18x7 double): 功能: 包含了机器人执行任务的关节角度序列。这是一个 18 行 7 列的矩阵,每列对应于机器人的一个特定姿态或操作步骤。通常用于

ACS运动控制:轨迹拐点、曲率不连续点
1.拐点是什么: 拐点是在2个相邻段之间的非光滑连接的点。在一个拐点处,速度矢量改变了它的方向。如果这个速度矢量非0,那么所有与该段轨迹相关的坐标轴在拐点处的速度均表现出不连续性。 2.曲率不连续点是什么: 是即使两个相邻段之间是平滑连接的,但是两个段具有不同或不同方向的曲率。大多数这样的光滑连接,其实际上是间断点(曲率不连续点)。在该类型的不连续点上,所有相关坐标轴都表现出加速度的不连续性

SpringBoot接入高德地图猎鹰轨迹服务API
SpringBoot接入高德地图猎鹰轨迹服务API 一、AP文档 猎鹰轨迹服务API文档 二、页面图 1、需登录账号,申请对应的应用key值 三、代码部分: 1、控制层 @RestController@RequestMapping("/gdTrack")public class TrackController {private final MapTrackUtils mapT

U3D——刀光轨迹插件的改进
原文地址:http://www.cnblogs.com/hellohuan/p/3478907.html U3D——刀光轨迹插件的改进 之前在PC端的游戏中实现过轨迹,算法喜闻乐见,收集每帧的控制点,对其进行B样条插值,生成D3DTriStrip。 这两天刚刚接触U3D,美术给了一个轨迹的插件,要求我扩展脚本,支持锁链刀弯刀的刀光计算,暂且命名多控制点的轨迹。 算是

openlayers 轨迹回放(历史轨迹),实时轨迹
本篇介绍一下使用openlayers轨迹回放(历史轨迹),实时轨迹 1 需求 轨迹回放(历史轨迹)实时轨迹 2 分析 主要是利用定时器,不断添加feature 轨迹回放(历史轨迹),一般是一次性拿到所有坐标点,按照时间间隔不断循环添加feature实时轨迹,一般是通过websocket监听,不断获取最新坐标点,根据上报的频率,可能需要抽样 3 实现 <template><div
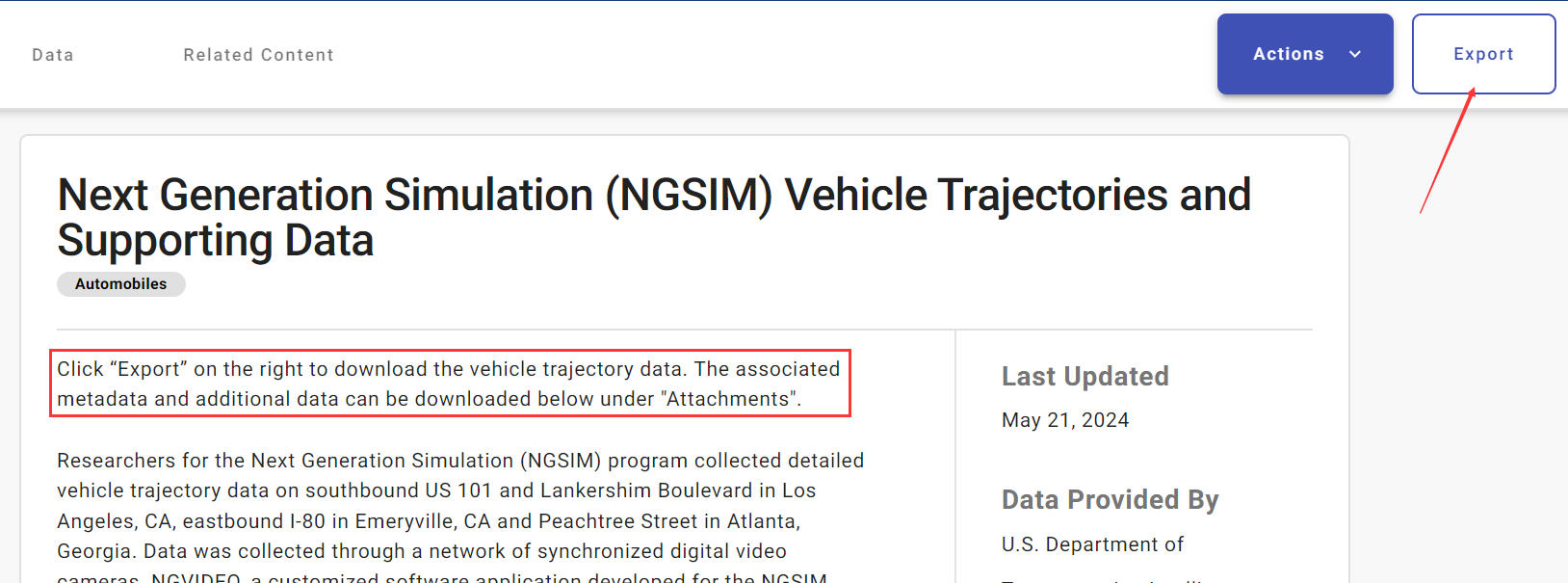
车辆轨迹预测系列 (二):常见数据集介绍
车辆轨迹预测系列 (二):常见数据集介绍 文章目录 车辆轨迹预测系列 (二):常见数据集介绍1、NuScenes (2020):1、下载2、说明 2、Waymo Open Dataset (2020):1、介绍2、概述3、下载4、教程5、参考 3、Lyft Level 5 (2020):1、官方2、数据集3、备注 4、Argoverse (2019):1、数据下载2、参考 5、INTERA

简单且高效的水域物探轨迹坐标转换程序
简单且高效的水域物探轨迹坐标转换程序 前言 水上测线的高精度定位是水域物探的难题,水域磁法、水域地震实施时常采用船舶拖拽传感器进行走航式观测,GPS仪器放在船舶上测量,造成船舶位置与传感器位置存在偏差,后期资料整理需要校正。每次水域物探采集几万至几十万个平面坐标数据,采用手工校正费时费力,且较易出错。因此,本人开发了一套简单且高效的水域物探轨迹坐标校正程序。 文章目录 简单且高效的水域物

【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory
【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory Generation and Control for Quadrotors 本系列主要是对精读的一些关于无人机、无人车的轨迹搜索论文的整理,包括了论文所拓展的其他一些算法的改进思路。 这是本系列的第一篇文章,也是UAV轨迹规划的开山之作,是所有学习无人机方向的需要精读的第一篇文章,两个作者来自于宾夕

高德地图轨迹回放/轨迹播放
前言 本篇文章主要介绍高德地图的轨迹回放或播放的实现过程,是基于vue2实现的功能,同时做一些改动也是能够适配vue3的。其中播放条是用的是element UI中的el-slider组件,包括使用到的图标也是element UI自带的。可以实现轨迹的播放、暂停、停止、播放倍数,以及播放拖拽,涉及到的高德地图的相关权限申请,这里就不再赘述,好了,废话不多说,效果图附上。 效果图

【Cloudscapes V2】Blender商城10周年免费领取礼物超逼真的Vdb云和爆炸合集烟雾体积云字体符号轨迹火焰粒子
6月19号的限时免费领取插件挺牛的,可以在blender里渲染体积云、爆炸特效、火焰、烟雾等效果,非常逼真。 Blender商城10周年免费领取礼物:https://blendermarket.com/birthday Cloudscapes V2 - 超逼真的 Vdb 云和爆炸合集 CloudScapes 是 VDB 格式的 Blender 逼真的 3D 体积云库。它包括 18 种云和 3
【凤凰房产-注册安全分析报告-缺少轨迹的滑动条】
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 1. 暴力破解密码,造成用户信息泄露 2. 短信盗刷的安全问题,影响业务及导致用户投诉 3. 带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞 所以大部分网站及App 都采取图形验证码或滑动验证码等交互解决方案, 但在机器学习能力提高的当下,连百度这样的大厂都遭受攻击导致点名批评, 图形验证及交互验证方式的安全性到底如

轨迹规划论文阅读20220109-A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles
0、摘要 提出了一种基于轨迹优化的高效实时自动驾驶运动规划方法。将轨迹空间离散化->利用cost functions 来找到最佳轨迹。 引[CSDN1]: 规划器首先把规划空间离散化 ,并根据一组代价函数搜索最优轨迹,然后对轨迹的path和speed进行迭代优化。文中提出了一种“post-optimization”的方法,可以弥补离散化难以求出最优解的问题(离散越密,越接近最优解),

轨迹优化 | 图解欧氏距离场与梯度场算法(附ROS C++/Python实现)
目录 0 专栏介绍1 什么是距离场?2 欧氏距离场计算原理3 双线性插值与欧式梯度场4 仿真实现4.1 ROS C++实现4.2 Python实现 0 专栏介绍 🔥课程设计、毕业设计、创新竞赛、学术研究必备!本专栏涉及更高阶的运动规划算法实战:曲线生成与轨迹优化、碰撞模型与检测、多智能体群控、深度强化学习运动规划、社会性导航、全覆盖路径规划等内容,每个模型都包含代码实现加深理

Spark高级数据分析(1) ——纽约出租车轨迹的空间和时间数据分析
本文在之前搭建的集群上,运行一个地理空间分析的示例,示例来自于《Spark高级数据分析》第八章。 Github项目地址:https://github.com/sryza/aas/tree/master/ch08-geotime , 这个例子是通过分析纽约市2013年1月份的出租车数据,统计纽约市乘客下车点落在每个行政区的个数。 在开始正文之前,需要掌握以下基础知识: Scala基础语法
Web前端轨迹追踪:深入探索与解析
Web前端轨迹追踪:深入探索与解析 在数字化时代的浪潮中,Web前端作为用户与互联网世界交互的桥梁,承载着丰富的信息和交互体验。而轨迹追踪,作为前端开发中不可或缺的一环,对于提升用户体验、优化产品性能以及实现精准营销具有重要意义。本文将从四个方面、五个方面、六个方面和七个方面,深入剖析Web前端轨迹追踪的核心要点和实践策略。 四个方面:Web前端轨迹追踪的基础概念与原理 首先,我们需要明确W