曲率专题

ACS运动控制:轨迹拐点、曲率不连续点
1.拐点是什么: 拐点是在2个相邻段之间的非光滑连接的点。在一个拐点处,速度矢量改变了它的方向。如果这个速度矢量非0,那么所有与该段轨迹相关的坐标轴在拐点处的速度均表现出不连续性。 2.曲率不连续点是什么: 是即使两个相邻段之间是平滑连接的,但是两个段具有不同或不同方向的曲率。大多数这样的光滑连接,其实际上是间断点(曲率不连续点)。在该类型的不连续点上,所有相关坐标轴都表现出加速度的不连续性
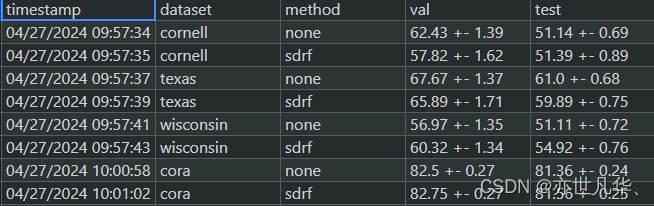
【传知代码】基于曲率的图重新布线(论文复现)
前言:在图形处理中,一个至关重要的问题是图形的重新布线,即在不改变图形基本结构的前提下,通过调整节点间的连接关系,使图形具有更好的性质,如更低的复杂度、更高的可视化效果或更强的鲁棒性。传统的图形重新布线方法往往依赖于直观的经验或简单的启发式算法,难以适应复杂多变的应用场景,近年来,基于曲率的图重新布线技术应运而生,为图形优化领域带来了新的曙光。与传统的方法相比,基于曲率的图重新布线技术更加注重图

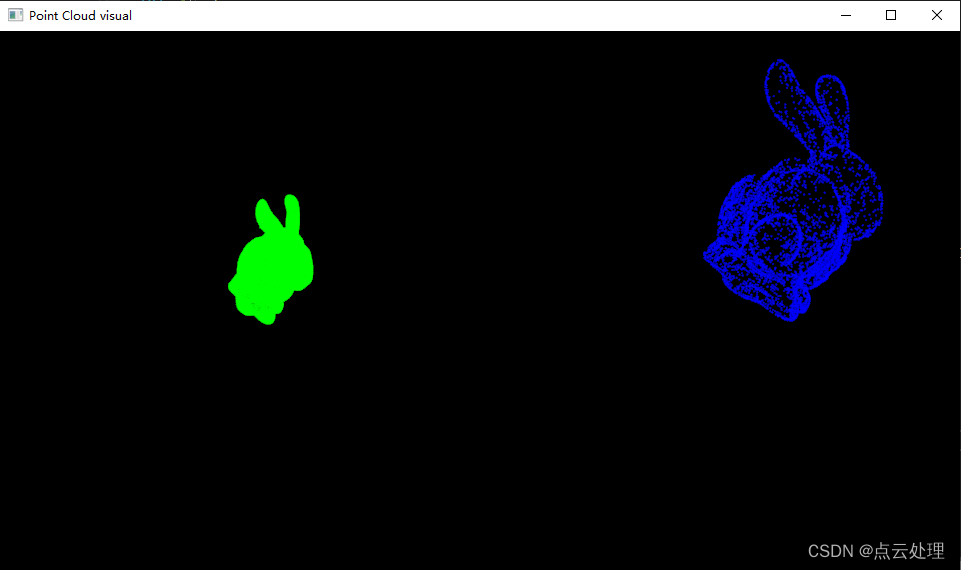
基于曲率的关键点检测
曲率是描述点云中每个点局部几何形状的一种度量。高曲率的点通常位于边缘、角点等显著位置。因此,通过检测曲率较高的点,我们可以找到点云中的关键点。 函数实现 下面是一个用于基于曲率检测关键点的函数实现 计算平均曲率 //计算平均曲率float com_avg_curvature(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud

Arnold材质节点篇-随机颜色抖动color_jitter、三平面triplanar、ambient_occlusion环境光遮蔽、curvature曲率
color_jitter 节点,可以设置模式是物体还是面,具体效果可以看下图: 【三平面triplanar】 在贴图的时候,由于模型形状,进行UV贴图的时候,发现贴图并不能很好的贴到模型上,三平面就是一个很好的方法。 checkboard,可以生成网格贴图到模型上查看贴图效果。 三平面适合不规则贴图的方法。 【光线切换Ray switch】 Ray_switch_
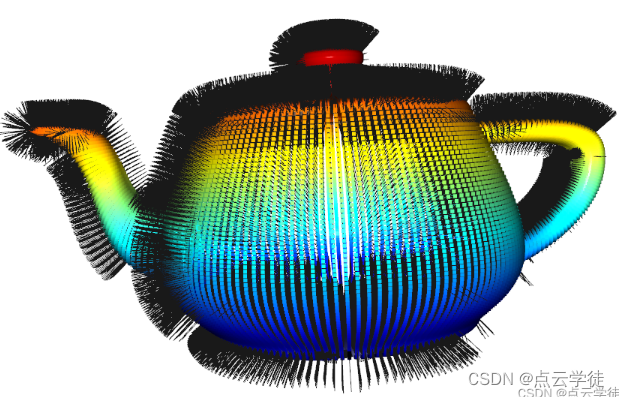
MATLAB 自定义实现点云法向量和曲率计算(详细解读)(64)
MATLAB 自定义实现点云法向量和曲率计算(详细解读)(64) 一、算法介绍二、算法步骤三、算法实现1.代码 (完整,注释清晰,可直接用)2.结果 一、算法介绍 首先说明: ------这里代码手动实现,不调用matlab提供的法向量计算接口,更有助于大家了解法向量和曲率的计算方法,步骤清晰,属于点云处理的深入,相信如何从点云坐标得到每个点的法向量和曲率会在看完代码后完全了解


特征值的大小和局部区域的曲率和特征向量的大小的关系
一、特征值和特征向量是矩阵的特征分解产生的结果。在计算机视觉和图形学领域,通常用于分析局部曲率和形状的特征。下面是特征值、特征向量和局部曲率之间的关系: 特征值(Eigenvalues): 特征值表示了在特征向量方向上的变化程度。在计算局部曲率时,特征值通常表示曲率的大小。特征值的大小直接反映了局部区域在对应特征向量方向上的曲率大小。较大的特征值表示更大的曲率变化,而较小的特征值表示更小的曲率
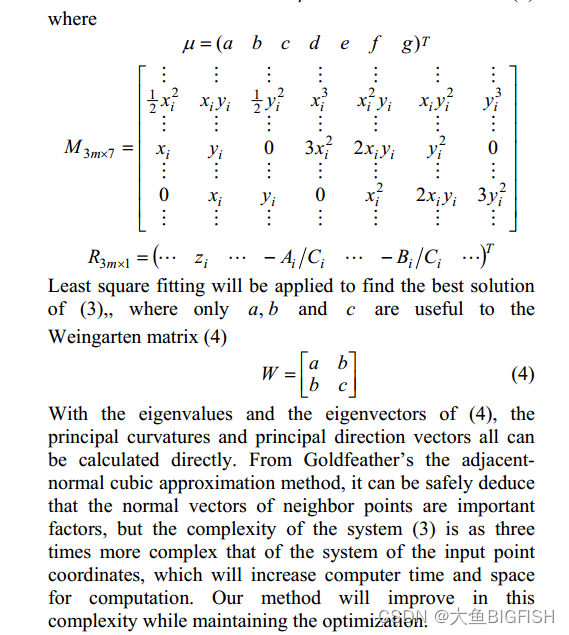
二次曲面拟合计算点云法曲率、主曲率以及平均曲率(手写版)
目录 一、相关原理及介绍 二、计算流程 三、实现代码 四、最终结果 参考文献:[1]周煜,张万兵,杜发荣等.散乱点云数据的曲率精简算法[J].北京理工大学学报,2010,30(07):785-789.DOI:10.15918/j.tbit1001-0645.2010.07.021. [2]蔡志敏,王晏民,黄明.基于KD树散乱点云数据的Guass平
loss的相对曲率的测量
loss的相对曲率的测量 代码代码解释 代码 from matplotlib import pyplot as pltimport numpy as nploss=np.linspace(0,10,1000)loss=8/(np
(JZ4244)2019.01.29【NOIP提高组】模拟B组 0.yi (曲率飞船)
【五校联考6day2】yi Description 小明是■■■星际旅游公司的员工,负责安排飞船,有N 艘飞船由他管理,每艘飞船能容纳的人数都不同。今天小明被要求为一个去锑星的旅游团安排往返的飞船,旅游团有M人,小明希望用最少的飞船完成任务。但不是所有的飞船都能用的,地球和锑星距离K镾(此单位由锑星人发明,后在星际旅游业界广泛使用),而每一艘飞船加满燃料后能飞行的最长路程都不一样,除了
关于曲率、曲率半径和曲率圆,看这几篇文章就够啦
关于曲率、曲率半径和曲率圆的内容,是考研数学数学一和数学二大纲中明确要求掌握的内容,但这部分内容在很多教材教辅以及练习题中较少涉及。在本文中,荒原之梦考研数学网就为大家整理了曲率、曲率半径和曲率圆方程相关的概念、基础知识以及练习题,能使我们更好的学习和练习这部分内容: 什么是曲率?什么是曲率圆? - 荒原之梦考研数学曲率的公式(B005) - 荒原之梦考研数学曲率半径的公式(B005) - 荒原
Matlab 点云曲率计算(之二)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 之前已经讨论过许多关于计算曲率的问题,这里使用一个通过拟合三次曲面方程的方式来计算曲率,计算过程如下图所示: 二、实现代码 %********
Matlab 点云曲率计算(之二)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 之前已经讨论过许多关于计算曲率的问题,这里使用一个通过拟合三次曲面方程的方式来计算曲率,计算过程如下图所示: 二、实现代码 %********
硬科技企业社区“曲率引擎”品牌正式发布
“曲率引擎”,是科幻作品中最硬核的加速系统,通过改变时空的曲率,可实现光速飞行甚至能够超越光速。11月3日,“曲率引擎(warp drive)”作为硬科技企业社区品牌,在2023全球硬科技创新大会上正式对外发布。 西安中科光机投资控股有限公司董事长曹慧涛在发布会上介绍,位于西安市高新区的这个硬科技企业创业基地,突显“曲率引擎”科技空间概念,以光子产业技术创新为依托,承载着硬科技创业“雨林生态”的
硬科技企业社区“曲率引擎”品牌正式发布
“曲率引擎”,是科幻作品中最硬核的加速系统,通过改变时空的曲率,可实现光速飞行甚至能够超越光速。11月3日,“曲率引擎(warp drive)”作为硬科技企业社区品牌,在2023全球硬科技创新大会上正式对外发布。 西安中科光机投资控股有限公司董事长曹慧涛在发布会上介绍,位于西安市高新区的这个硬科技企业创业基地,突显“曲率引擎”科技空间概念,以光子产业技术创新为依托,承载着硬科技创业“雨林生态”的
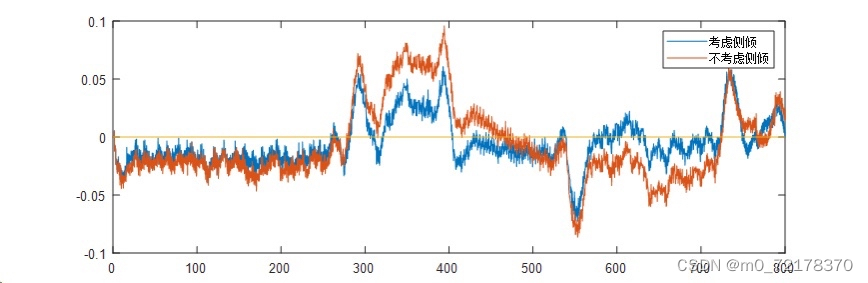
轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真
轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真 ID:73100674012393406hjm7

曲率、曲率圆和曲率半径
一个圆半径越小,看起来就越弯曲;半径越大,看起来就越平;半径无限大,看起来就像一条直线,几乎不弯曲了。 —— 引言 曲率是描述曲线弯曲程度的量。从上面左图可以看出,弯曲程度越大、转角越大;从右图可以看出,转角相同时,弧越短、弯曲程度越大。 如上图所示,曲线C在M点的曲率定义为: 如上图所示,设曲线y=f(x)在点M处的曲率为,在点M处的曲线的法线上,在凹的一侧取一点
PCL点云处理之Pcd文件读取、法线与曲率计算、多线程加速、属性字段合并 (二百零八)
PCL点云处理之Pcd文件读取、法线与曲率计算、多线程加速、属性字段合并(二百零八) 一、相关介绍二、算法实现1.代码 一、相关介绍 (夜深人不静) 法线和曲率的计算是点云处理中常用的关键特征,PCL提供了特有的点类型PointNormal来记录这些信息,通过OMP多线程对相关的计算函数进行加速,实现快速计算法线和曲率,如果不加速往往是非常耗时的,当然这里的代码很短,快速看完就