本文主要是介绍基于PreScan与Carsim的车道保持联合仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于PreScan与Carsim的车道保持联合仿真
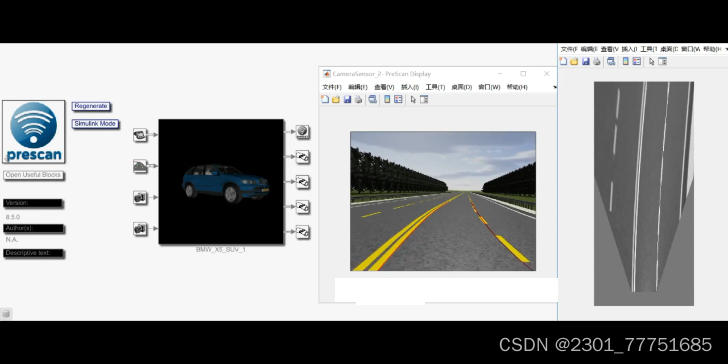
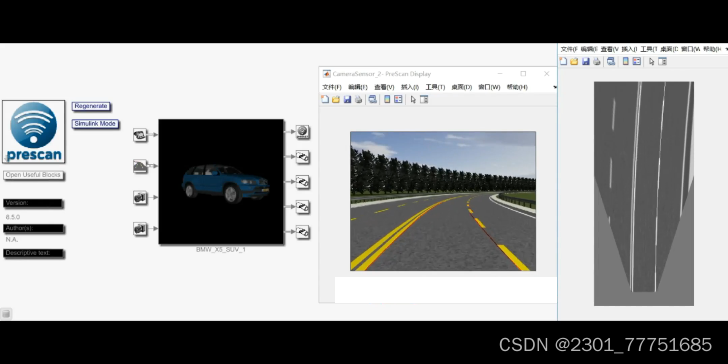
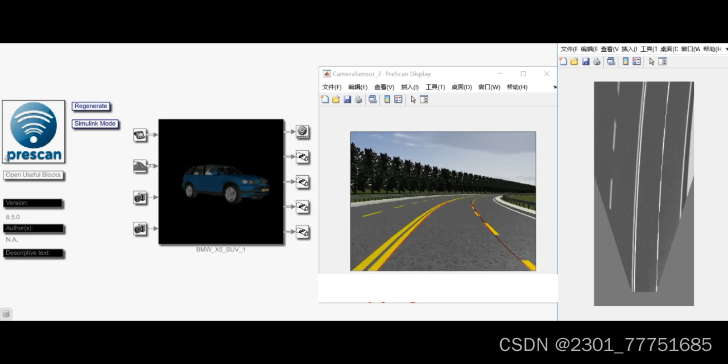
其中车道线识别算法通过采集单目摄像头数据,Ransac算法提取车道线;采用MPC控制器实现车道保持与循迹控制。
内附PreScan、Carsim与Simulink模型,有相关报告和参考文献
ID:63180675501838390
这篇关于基于PreScan与Carsim的车道保持联合仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!