车道专题

YOLOv8/v10+DeepSORT多目标车辆跟踪(车辆检测/跟踪/车辆计数/测速/禁停区域/绘制进出线/绘制禁停区域/车道车辆统计)
01:YOLOv8 + DeepSort 车辆跟踪 该项目利用YOLOv8作为目标检测模型,DeepSort用于多目标跟踪。YOLOv8负责从视频帧中检测出车辆的位置,而DeepSort则负责关联这些检测结果,从而实现车辆的持续跟踪。这种组合使得系统能够在视频流中准确地识别并跟随特定车辆。 02:YOLOv8 + DeepSort 车辆跟踪 + 任意绘制进出线 在此基础上增加了用户

RK3568笔记五十七:基于UNetMultiLane的多车道线等识别部署
若该文为原创文章,转载请注明原文出处。 此篇记录在正点原子的ATK-DLRK3568上复现山水无移大佬的UNetMultiLane 多车道线、车道线类型识别。 数据是基于开源数据集 VIL100。其中数据标注了所在的六个车道的车道线和车道线的类型。 8条车道线(六个车道),对应的顺序是:7,5,3,1,2,4,6,8。其中1,2对应的自车所在的车道,从左往右标记。 车道线的类别(10个

Road-SLAM:基于道路标线车道级精度SLAM
文章:Road-SLAM : Road Marking based SLAM with Lane-level Accuracy 作者:Jinyong Jeong, Younggun Cho, and Ayoung Kim1 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经允许请勿转载! 对本文以及俯

基于RK3588的多摄像头车辆与车道线检测系统(基于rk3588的车辆和车道线检测,可以带四个720p的摄像头,2个1080p的摄像头)
硬件配置: 处理器:Rockchip RK3588,这是一款高性能的嵌入式处理器,支持多路高清视频输入和处理。摄像头配置: 4个720p(1280x720)分辨率的摄像头2个1080p(1920x1080)分辨率的摄像头 软件环境: 操作系统:Linux发行版,如Ubuntu开发语言:C++/Python框架:OpenCV用于图像处理,TensorFlow或PyTorch用于深度学习模型
使用OpenCV来实现自动驾驶中的车道线检测
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶” 作者:Dt Pham 编译:ronghuaiyang 导读 这是一个非常简单通用的pipeline,很有参考价值。 在这个项目中,我使用Python和OpenCV构建了一个pipeline来检测车道线。该pipeline包含以下步骤: 相机校正视角转换颜色阈值和区域掩码寻找车道像素测量车道曲线和曲率在原图像上显示结果 1. 相机
ECCV2020 | 300+FPS!超快的结构感知车道检测新网络
点击上方蓝字,获得更多精彩内容 精彩内容 浙大提出:超快速结构感知的车道线检测网络 ,在速度和准确性方面综合表现出色!轻量级版本速度高达300+ FPS!论文链接:https://arxiv.org/abs/2004.11757代码刚开源:https://github.com/cfzd/Ultra-Fast-Lane-Detection作者团队:浙江大学(李玺团队) 1 摘要 从上图可以看出

车道偏离预警系统技术规范(简化版)
车道偏离预警系统技术规范(简化版) 1 系统概述2 预警区域3 功能条件4 显示需求5 指标需求 1 系统概述 车道偏离预警系统工作在中高速驾驶的情况下,当驾驶员因注意力不集中导致车辆偏离本车道时,系统通过光学和声学信号对驾驶员进行提醒,减少因此导致的交通事故。功能主要依靠安装在车辆前挡风玻璃上的摄像头实现。 2 预警区域 当车辆偏离侧前轮外边缘 0.7s后将

Python图像处理入门学习——基于霍夫变换的车道线和路沿检测
文章目录 前言一、实验内容与方法二、视频的导入、拆分、合成2.1 视频时长读取2.2 视频的拆分2.3 视频的合成 三、路沿检测3.1 路沿检测算法整体框架3.2 尝试3.3 图像处理->边缘检测(原理)3.4 Canny算子边缘检测(原理)3.5 Canny算子边缘检测(实现)3.5.1 高斯滤波3.5.2 图像转化(彩色->灰度)3.5.3 Canny边缘检测3.5.4 生成Mask掩膜

实战 | 通过微调SegFormer改进车道检测效果(数据集 + 源码)
背景介绍 SegFormer:实例分割在自动驾驶汽车技术的快速发展中发挥了关键作用。对于任何在道路上行驶的车辆来说,车道检测都是必不可少的。车道是道路上的标记,有助于区分道路上可行驶区域和不可行驶区域。车道检测算法有很多种,每种算法都有各自的优缺点。 在本文中,我们将使用Berkeley Deep Drive数据集对HuggingFace(Enze Xie、Wenhai

利用GNSS IMU集成提高车道级定位精度
准确的定位对于很多不同的事情都是至关重要的。导航系统可以引导我们去某个地方,自动驾驶汽车可以利用这些数据在道路上安全行驶。尽管全球导航卫星系统(GNSS)在定位方面非常出色,但它们可能并不总是提供最准确的车道水平事实。解决这个问题的一个有希望的方法是将GNSS模块与IMU(惯性测量单元)集成。在这篇博文中,我们将探讨GNSS IMU集成如何帮助提高车道水平定位的准确性。让我们来谈谈这项技术的所有伟

车道线检测霍夫直线检测原理分析
http://blog.csdn.net/happy_stars_2016/article/details/52691255 一、车道线检测步骤 1、灰度化 灰度化关键函数: cvCvtColorcvCvtColor(IplImage* src, IplImage* dst, CV_BRG2GRAY); 最后一个参数为 CV_BRG2GRAY ,表示将BRG图片(彩色图片)

车道线检测交通信号识别车辆实时检测
系列文章目录 提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加 TODO:写完再整理 文章目录 系列文章目录前言车道线检测机器学习 前言 认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长! 本文先对车道线检测&交通信号识别&车辆实时检测做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章 提示:以下是本篇文

车道分割YOLOV8-SEG
车道分割YOLOV8-SEG,训练得到PT模型,然后转换成ONNX,OPENCV的DNN调用,支持C++,PYTHON,ANDROID开发 车道分割YOLOV8-SEG

当一个车进入车道只占另外一个车道的1/4或者比1/4还小的问题解答—— 另请大神们指点一二
上面的图当然是一个例子,不可能上传的比较全,这个主要是一个典型的跨车道问题,我现在主要的问题是什么那,我加了一个条件,当车的位置小于1/4时,我认为无车,当时,当车慢慢的移动到大于1/4时,就会算做一个车,这样就会造成多检,当我起初判断有车进来时,我设置一个标志位,而且它的位置小于1/4,左右两边都可以,然后判断与之对应的隔壁车道,判断是否有车同时进来,如果有车同时进来,则认为是跨车

PINet车道线检测+YOLOv8视频目标检测
前言: 本文主要目的是实现在PINet车道线检测的代码中嵌入YOLOv8的目标检测模块,具体效果如图所示: 在学习和使用YOLOv8进行目标检测时,感觉可以和最近研究的车道线检测项目结合起来,形成一套如上图所示的视频效果。 其实将车道线检测和目标检测结合可以提供更全面的场景信息。车道线检测提供了关于道路结构和车辆行驶方向的信息,而目标检
【元胞自动机】基于matlab元胞自动机双车道交通流模型含靠右行驶【含Matlab源码 231期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

【车道线检测】基于matlab Hough变换图片车道线检测 【含Matlab源码 276期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

传统方法(OpenCV)_车道线识别
一、思路 基于OpenCV的库:对视频中的车道线进行识别 1、视频处理:视频读取 2、图像转换:图像转换为灰度图 3、噪声去除:高斯模糊对图像进行去噪,提高边缘检测的准确性 4、边缘检测:Canny算法进行边缘检测,找出图像中边缘 5、区域裁剪:定义ROI(Region of Interest,感兴趣区域),裁剪出这个区域的边缘检测结果 6、直线检测:霍夫变换对ROI区域

车道线检测_Canny算子边缘检测_1
Canny算子边缘检测(原理) Canny算子边缘检测是一种经典的图像处理算法,由John F. Canny于1986年提出,用于精确、可靠地检测数字图像中的边缘特征。该算法设计时考虑了三个关键目标:低错误率(即尽可能多地检测真实的边缘,同时避免误报)、边缘定位的准确性(确保检测到的边缘位置与实际边缘位置紧密对应)以及边缘的单响应性(确保图像中的每一个边缘只被检测一次,避免重复或断裂)。Ca

Python车道线偏离预警
程序示例精选 Python车道线偏离预警 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言 这篇博客针对《Python车道线偏离预警》编写代码,代码整洁,规则,易读。 学习与应用推荐首选。 运行结果 文章目录 一、所需工具软件 二、使用步骤 1. 主要代码 2. 运行结果 三、在线协助 一、所需工具软件

车道线检测综述——【极市】方浩:车道线检测新SOTA,RESA个人笔记
视频链接:https://www.bilibili.com/video/BV1664y1o7wg 一、背景 车道线检测:从输入的图片中检测出车道线,图片是由车辆的前置摄像头拍摄。 1.1 车道线检测在自动驾驶中如何使用 自动驾驶从算法的角度主要分为三个部分:环境感知、决策、执行。环境感知即通过各种传感器采集数据,用算法进行分析,再输入Planning模块,Planning模块根据自己要
车道线检测中的IPM变换
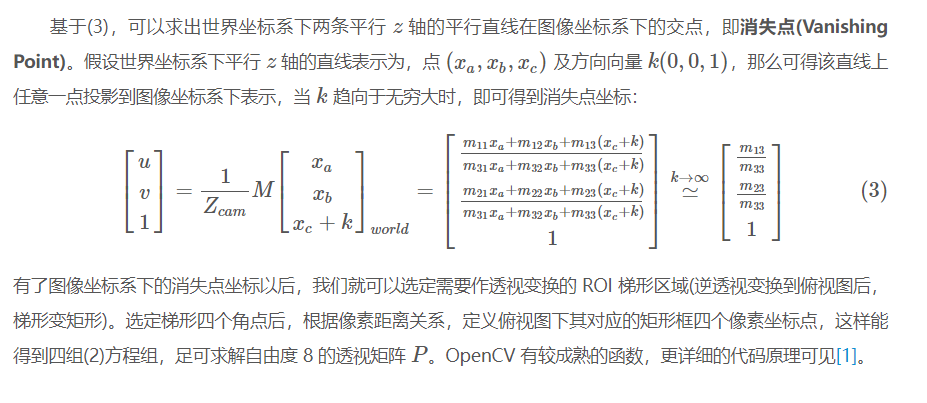
车道线检测中的IPM变换 车道线检测(Lane Detection)是 ADAS 系统中重要的功能模块,而对于 L4 自动驾驶系统来说,在不完全依赖高精度地图的情况下,车道线检测结果也是车辆运动规划的重要输入信息。由于俯视图(BEV, Bird’s Eye View)下做车道线检测相比于前视图,有天然的优势,所以本文根据几篇论文(就看了两三篇)及项目经验,探讨总结俯视图下做车道线检测的流程方案,
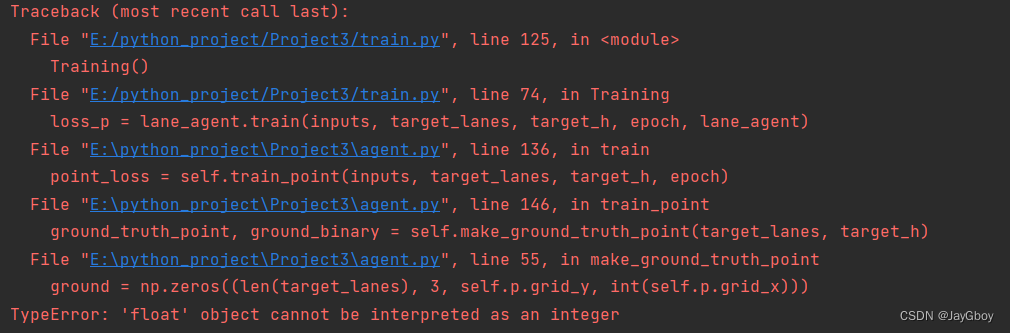
【PINet车道线检测】代码复现过程
《Key Points Estimation and Point Instance Segmentation Approach for Lane Detection》 论文:https://arxiv.org/abs/2002.06604 代码:GitHub - koyeongmin/PINet 论文解读:http://t.csdnimg.cn/AOV91 这是篇关于自动驾驶中车道检测技术
车道线分割项目记录-Discriminative_loss
目录 一、损失函数原理 1. L_var 2. L_dist 二、代码 一、损失函数原理 主要是看明白了每个符号代表的意思就能明白了。 1. L_var L_var是方差损失,也就是一条车道线的像素点之间的方差越小越好。上面的式子中,前面两个求和以及1/C,1/N,就是为了平均这个损失值,取所有的车道线,再取所有的像素点,计算完了对所有车道线以及所有像素点求均值。

第一章 课程介绍——基于matlab的车道保持PID控制器搭建(仅供学习)
基于matlab的车道保持PID控制器搭建 第一章 课程介绍 第二章 PID原理介绍 第三章 基于MATLAB/simulink的PID控制器搭建 第四章 基于MATLAB/simulink与Carsim联合仿真的车道保持PID控制器搭建 第五章 课程总结与展望 文章目录 基于matlab的车道保持PID控制器搭建第一章 课程介绍1、课程目录2、课程效果 第二章 PID原理介绍总结

计算机设计大赛 深度学习机器视觉车道线识别与检测 -自动驾驶
文章目录 1 前言2 先上成果3 车道线4 问题抽象(建立模型)5 帧掩码(Frame Mask)6 车道检测的图像预处理7 图像阈值化8 霍夫线变换9 实现车道检测9.1 帧掩码创建9.2 图像预处理9.2.1 图像阈值化9.2.2 霍夫线变换 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 机器视觉 深度学习 车道线检测 - opencv 该项目较为新颖,