prescan专题
Prescan 8.5.0版本实现循环障碍小车的设置
Prescan 8.5.0版本实现循环障碍小车的设置 1、 先在prescan中搭建我们所需要的道路场景以及一个封闭的车辆行驶曲线(使用Inherited path Definition),封闭路径的意思是道路的起点和终点是同一个位置点,然后将我们所需要的车辆给放到我们所设置的道路路径上: 2、 接着鼠标单机选中放到路径上的车辆(注意这个车辆的我们不使用动力学模型,否则设置的循环可能不成功,有

prescan学习之二:自动化测试--prescan.experiment的使用
看了prescan的自动化测试,将所得写下来。 1.搭建模型2.Data Model Api3.各个函数使用举例3.1 getDefaultFilename3.2 getFieldValue3.3 readDataModels3.4 replaceWorldObjectByName3.5 run3.6 runWithDataModels3.7 setFieldValue3.8 world
PreScan与MATLAB联合仿真报错
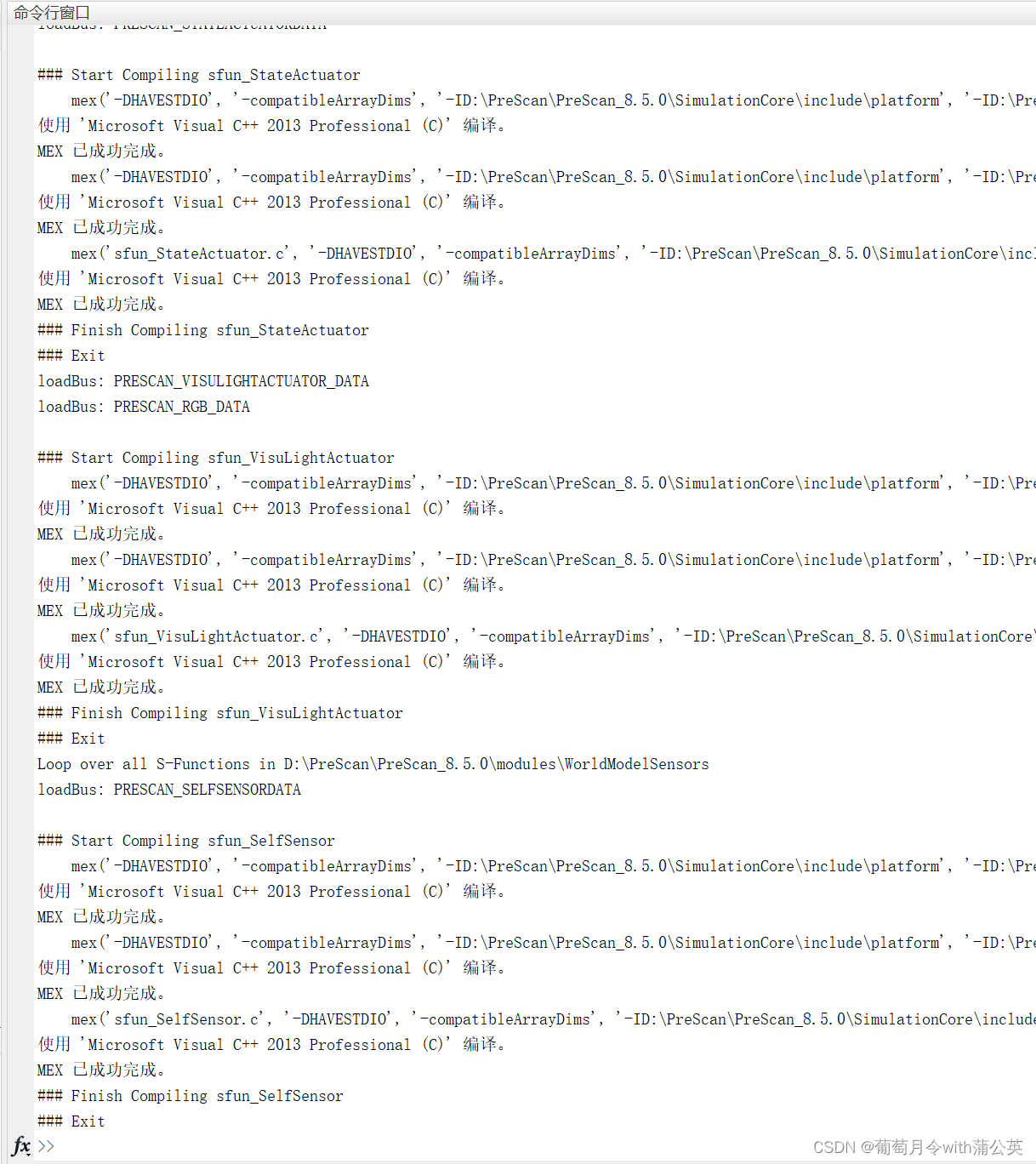
一、 问题: Error:Matlab ||和&&运算符的操作数必须能够转换为逻辑标量值 二、解决办法 必须安装VS2013(我装的VS2017不行的),然后重启prescan和MATLAB,编译通过,界面如下: 三、VS2013安装包 链接:https://blog.csdn.net/qq_33742119/article/details/80075352 转自:https://bl
PreScan与MATLAB联合仿真报错
一、 问题: Error:Matlab ||和&&运算符的操作数必须能够转换为逻辑标量值 二、解决办法 必须安装VS2013(我装的VS2017不行的),然后重启prescan和MATLAB,编译通过,界面如下: 三、VS2013安装包 链接:https://blog.csdn.net/qq_33742119/article/details/80075352 转自:https://bl
基于PreScan与Carsim的车道保持联合仿真
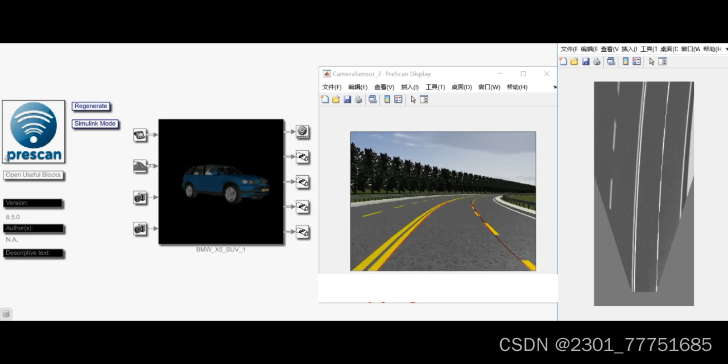
基于PreScan与Carsim的车道保持联合仿真 其中车道线识别算法通过采集单目摄像头数据,Ransac算法提取车道线;采用MPC控制器实现车道保持与循迹控制。 内附PreScan、Carsim与Simulink模型,有相关报告和参考文献 ID:63180675501838390