本文主要是介绍Carsim-与Simulink联合仿真时车辆穿模?(1),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录)
- 简介
- 整个Demo流程如下:
- 1. 复制一个已有的demo
- 2. 修改Demo所属Dataset和名称
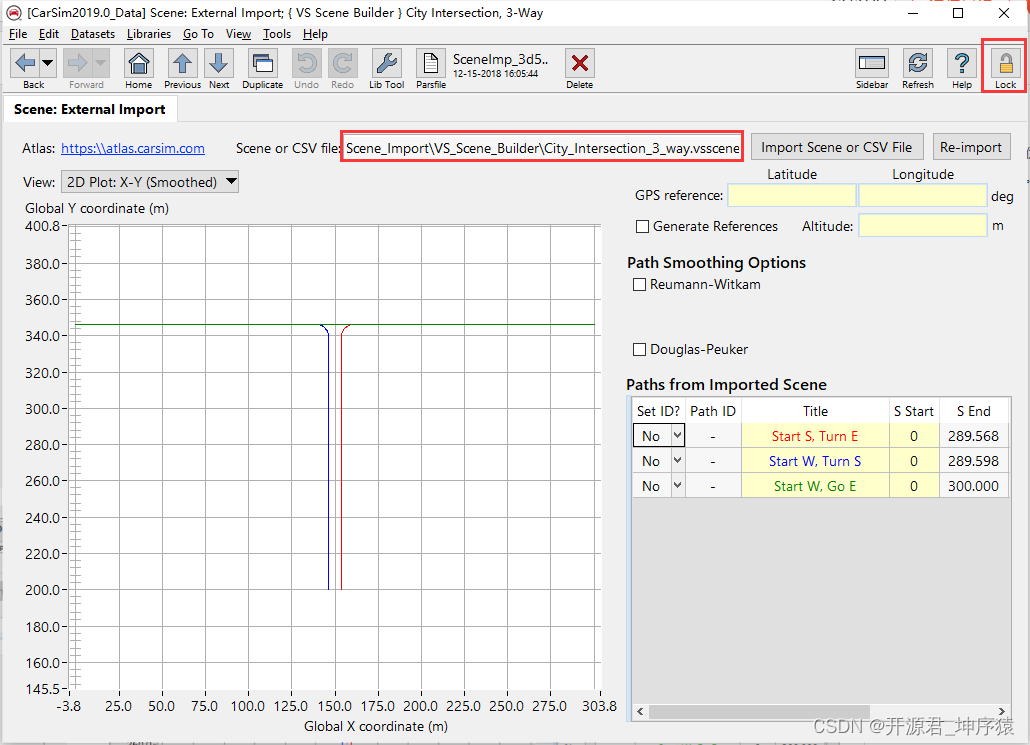
- 2.1 在Carsim的`Procedure - 3D Road - 外部 Path 导入`一栏已经默认导入`Vs Scene Builder`生成的地图文件(`.vsscene`文件),此时不用进行修改。
- 3. 不用Simulink,直接点击`Run Math Model`后,生成的Video车辆状况很正常。
- 4. 使用Simulink
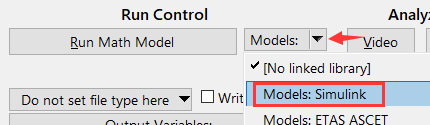
- 4.1 模型使用Simulink
- 4.2 随便选择一个模型,然后`Duplicate`(复制)
- 4.3 选择刚刚复制好的模型,点击进去修改
- 4.4 我将`abs_CS9.mdl`复制为了:`Demo_Simulink_1.mdl`
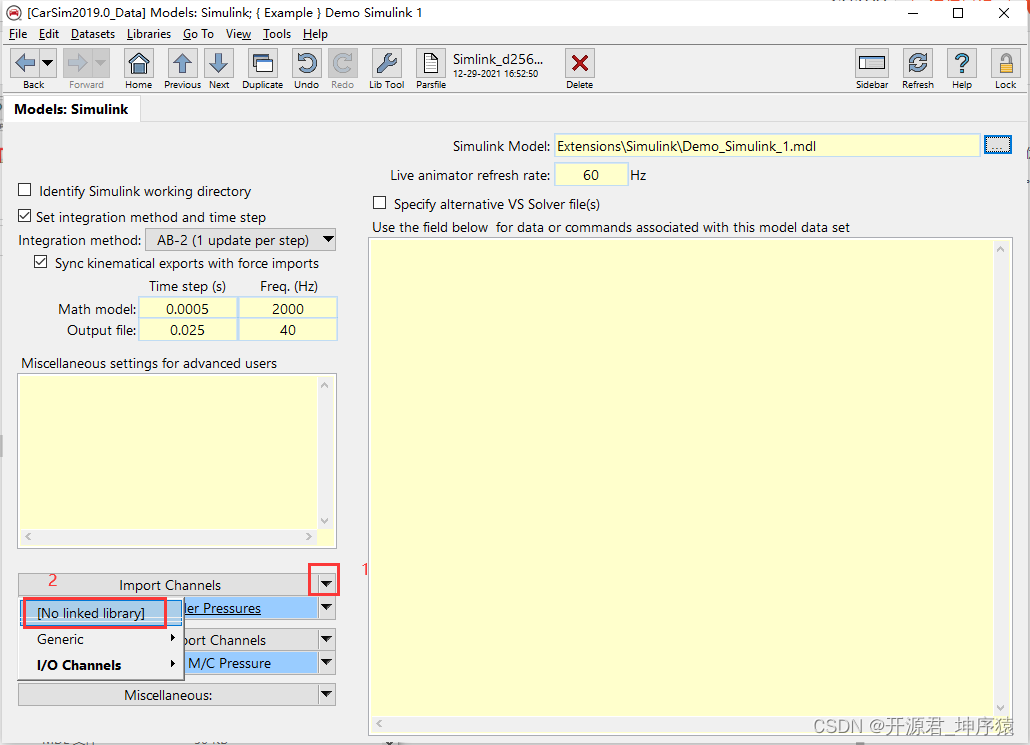
- 4.5 选中刚刚复制的`.mdl`模型
- 4.6 这里我把导入、导出数据都关闭了,因为没必要
- 4.6 运行
- 4.7 实时仿真,也就是上面这个图的`1`步骤可以执行,也可以不执行。点击`Send to Simulink`后,等待Simulink的启动。
- 4.8 点击`Run`,Simulink计算完(或运行几秒后手动停止)后按照上面的步骤查看Video。
简介
Carsim 2019.0自带的Vs Scene Builder有Bug?与simulink联合仿真车辆会穿模?
整个Demo流程如下:
1. 复制一个已有的demo

2. 修改Demo所属Dataset和名称

2.1 在Carsim的Procedure - 3D Road - 外部 Path 导入一栏已经默认导入Vs Scene Builder生成的地图文件(.vsscene文件),此时不用进行修改。


3. 不用Simulink,直接点击Run Math Model后,生成的Video车辆状况很正常。

结果酱紫的

4. 使用Simulink
4.1 模型使用Simulink
4.2 随便选择一个模型,然后Duplicate(复制)
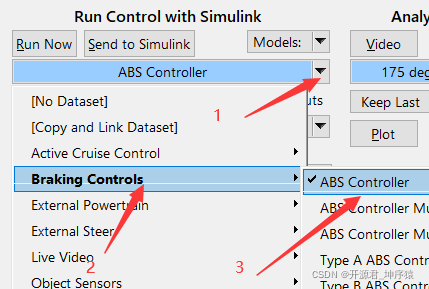
例如:Example,Demo Simulink 1
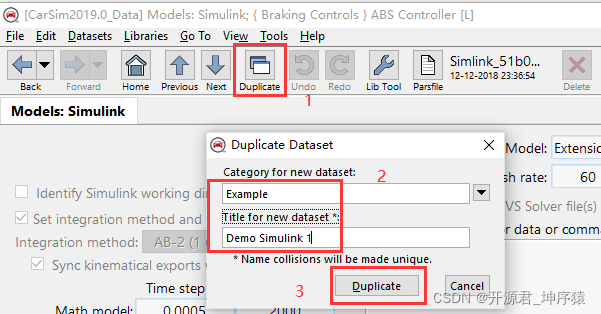
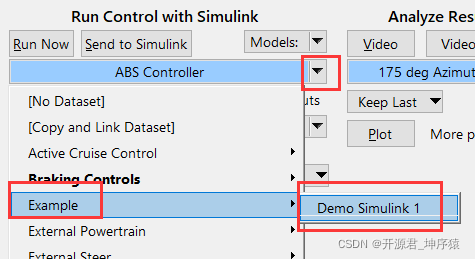
4.3 选择刚刚复制好的模型,点击进去修改
该模型的路径在carsim的数据库目录
(示例为:D:\Program Files (x86)\CarSim\CarSim2019.0_Data\Extensions\Simulink)
为什么要找这个目录?
因为要复制一个新的,以免影响后续其他案列的运行

4.4 我将abs_CS9.mdl复制为了:Demo_Simulink_1.mdl

4.5 选中刚刚复制的.mdl模型
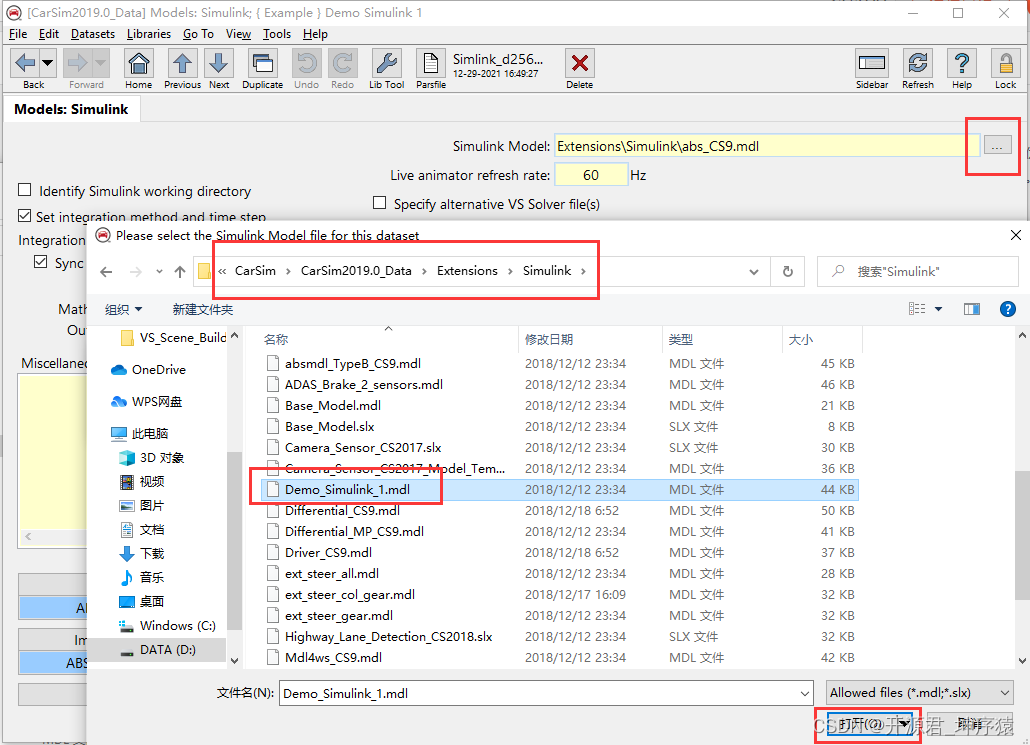
4.6 这里我把导入、导出数据都关闭了,因为没必要
4.6 运行
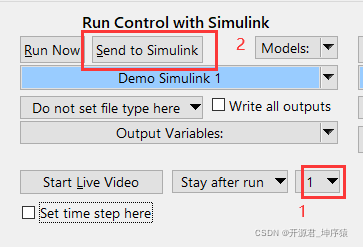
4.7 实时仿真,也就是上面这个图的1步骤可以执行,也可以不执行。点击Send to Simulink后,等待Simulink的启动。

4.8 点击Run,Simulink计算完(或运行几秒后手动停止)后按照上面的步骤查看Video。
结果酱紫!!!
车辆一直在地图的下面运行,或者一直往下坠落,根本没有初始化到地图文件的路径上!!!!
![]()

这篇关于Carsim-与Simulink联合仿真时车辆穿模?(1)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!