car专题

Lesson 87 A car crash
Lesson 87 A car crash 词汇 attendant n. 接待员,随从 构成:attend v. 出席,参加 -ant / -ent 人 例如:student 学生 assistant 助理 相关:attendance n. 出勤率 例句:Conan以前是一个好接待员。 Conan was a good attendant. bring v. 进来,送来

一文概括:内容可寻址寄存器(CAR)
一、概述 内容可寻址寄存器(Content-Addressable Register,CAR)是一种能够根据内容(数据)而非传统的存储地址来进行数据访问的特殊存储单元。与地址可寻址寄存器不同,内容可寻址寄存器可以通过指定的数据值来查找存储的位置,使其在需要高效数据检索的应用中尤其有用。 二、工作原理 内容可寻址寄存器的操作基于数据内容匹配而非地址访问。其工作过

【Car Guide.2】Basic Knowledge
文章目录 【History】【投诉榜】【油 VS 电】【三元锂 vs 磷酸铁锂】【本田、丰田、大众】飞度 【杂谈】 【History】 法国,标志,雪铁龙 美国,通用集团,有别克(GL8),凯迪拉克,雪佛兰,福特 福特旗下,曾有捷豹,路虎,阿斯顿马丁,沃尔沃,四大天王 捷克,斯柯达(大众) 意大利,布加迪(跑车,最快,大众) 英国,阿斯顿马丁 英国,宾利(被劳斯莱

UVA 11766 - Racing Car Computer(DP)
题目链接:11766 - Racing Car Computer 题意:n个人进行比赛,以下n行输入对于每个人而言,有a个人在他前面,b个人在他后面。可能并排,问根据所有人情况,找出矛盾最小的数目。 思路:这题只要想通一点就很简单了。 对于每个人而言,他的位置可能的区间为[a + 1, n - b]。 那么对于两个人而言,如果他们可能区间相交,那么肯定矛盾,反之则不矛盾。 证明
4.4 CMMI4级——几个直接与项目管理相关的PA(PP、PMC、IPM、RSKM、QPM、CAR)
2级到5级,直接跟 项目管理 有关的PA有: 2级:PP( 项目计划 )、PMC( 项目 计划跟踪与控制) 3级:RSKM( 风险管理 )、IPM(集成项目管理) 4级:QPM(定量项目管理) 5级:CAR(原因分析及解决方案) 2级的PP与PMC,描述了项目管理最基本的一些要素,如:项目要做 估算 、定义项目的生命周期、识别风险、制定进度计划
『项目整理』易CAR通项目说明文档-我的第一款APP
『项目整理』易CAR通项目说明文档-我的第一款APP 项目介绍功能介绍技术栈介绍实现效果如何运行备注 项目介绍 易CAR通项目是我的第一个Android项目。是一款结合了AR技术的模仿懂车帝的看车软件。因为是初学,所示实现的效果差强人意,很多的功能界面只实现到静态界面这个程度,使用的也是十分原始的技术栈。 其中AR模块因为体积太大,所以没有上传至gitee,AR功能演示视频如
(免费人工智能机器人、周报通、AI中文站、choose-car、智造喵)分享好用的ChatGPT
目录 1、ChatGPTer - 免费人工智能机器人 2、周报通 3、 AI中文站 - chat.7jm.cn 人工智能,稳定高效

(GPT-PLUS,RawChat,choose-car,Kimi,智谱清言)分享5个好用的ChatGPT
目录 1、GPT-PLUS拼车 2、RawChat公益站点 3、GPT-PLUS共享 4、choose-car 5、AI提示器 6、Kimi.ai - 帮你看更大的世界 7、智谱清言 1、GPT-PLUS拼车 https://home.topai.vip/list GPT-PLUS拼车 TOPAI宇宙 | Link3 2、RawChat公益站点 https:/

2020百度之星初赛二 Car(状压DP+二分)
Problem Description W 市最近面临了严重的交通拥堵问题,现在决定要在工作日(周一到周五)限号。 每天可以限制若干尾号的车辆,譬如说周一限尾号为 0 的车,周二限尾号为 1,2 的车。 每个尾号在五天当中最多只能被限一次,一天也可以什么牌照都不限。 我们要设置一个容量上限 m,使得至少存在一种方案,每一天不被限号的车的总数都小于等于 m。 请求出最小的 m。 Input
android 9.0 car的相关原生编译脚本配置
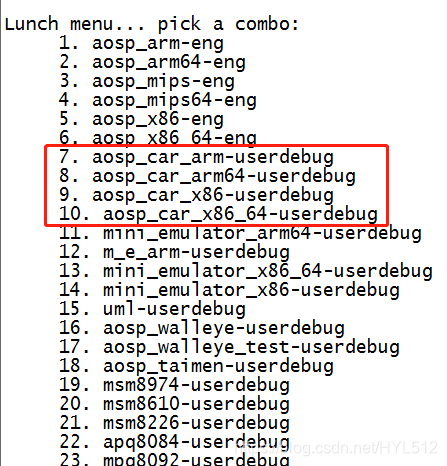
编译时会选择 source build/envsetup.sh lunch 选择 10 可以编译汽车相关的平台系统软件 分别调用以下编译脚本 device\generic\car\common\\car.mk # Auto modulesPRODUCT_PACKAGES += \android.hardware.broadcastradio@2.0-servi

C++ Car类的实现
题目描述: 英文:Implement a Car class that includes data members to represent a car’s make (e.g., Honda), model (e.g., Civic), production year, and price. The class interface includes methods that provide ap
Car的旅行路线 蓝桥真题
蓝桥题是真的坑 样例上写的是t组数据的格式 但是测试数据根本没有t 都是单组 这不是坑人吗? 其实就是最短路裸题 建图时需要一点计算几何 对于每个矩形只给任意三个顶点 利用向量点乘判断直角点 假设 1和3 2和4 互为对角点 那就满足 x1+x3=x2+x4 且 y1+y3=y2+y4 以此求出最后一个点 #include <bits/stdc++.h>using n
龙年首站『英国伦敦』同立海源参展第七届CAR-TCR Summit欧洲峰会
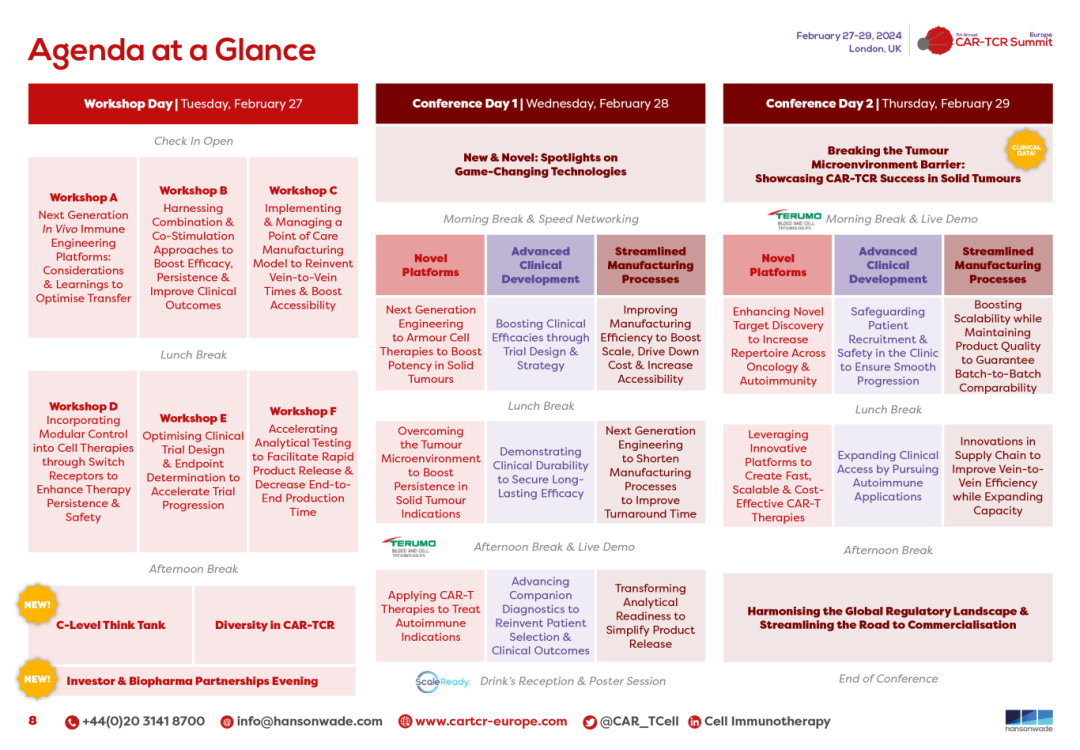
2024龙年首展,相约英国伦敦 第七届CAR-TCR Summit欧洲峰会将于2024年2月27-29日在英国伦敦举办。CAR-TCR Summit峰会是一场世界巅峰级盛会,全球顶尖团队将共聚于此探讨从研发到商业化全流程,以及如何提供安全、有效和商业上可行CAR-TCR疗法。 同立海源生物将携GMP级别的细胞分选磁珠、人源重组蛋白、免疫细胞培养基等CGT领域核心原料和整体解决方案亮相此次会议,
self_drive car_学习笔记--第5课:动态环境感知与3D detection
前言:这节课,主要是介绍激光雷达点云处理算法。处理基本思想就是,将3d点云信息转为2d信息,然后根据上一节课的图片处理算法常规操作即可。是不是挺简单的,哈哈哈。但,比较遗憾,本地环境问题还没有解决,还没有复现。这里记录的是,算法相关的论文以及GitHub开源的项目里面部分代码解析。好了,这一篇也仅供各位参考,欢迎大佬批评指正。 1 雷达激光点云基础及相关知识 1.1 激光雷达点云的认识 1)
pytorch_car_caring 排坑记录
pytorch_car_caring 排坑记录 任务踩坑回顾简单环境问题代码版本问题症状描述解决方法 cuda问题(异步问题)症状描述解决方法 任务 因为之前那个MPC代码跑出来的效果不理想,看了一天代码,大概看明白了,但要做改进还要有不少工作(对我来说),特别是如何对效果进行评估。正好我还要用到RL做这个任务的代码,就在github上看了下,发现有几个,打算都跑跑,看谁效果

关于Car api之sensorManager的获取使用
最近研究这块,突然看到一个提示 那我就去这里看看,发现是这样的: CarSensorManagerTest : @MediumTestpublic class CarSensorManagerTest extends CarApiTestBase {@Testpublic void testCreate() throws Exception {CarSensorManager carSens
class_4:car类
#include <iostream>using namespace std;class Car{public://成员数据string color; //颜色string brand; //品牌string type; //车型int year; //年限//其实也是成员数据,指针变量,指向函数的变量,并非真正的成员函数void (*printCarInfo)(string
使用Java 编程定义一个汽车类Car
编程定义一个汽车类Car 要求如下: (1)定义成员变量:品牌(String brand),价格(double price),颜色(String color),销售日期(Calendar date); (2)定义无参构造方法和带参构造方法,其中无参构造方法调用带参构造方法来初始化类中的变量; (3)定义上述成员变量所对应的getXxx()/setXxx()方法;以及一个显示所有成员信息
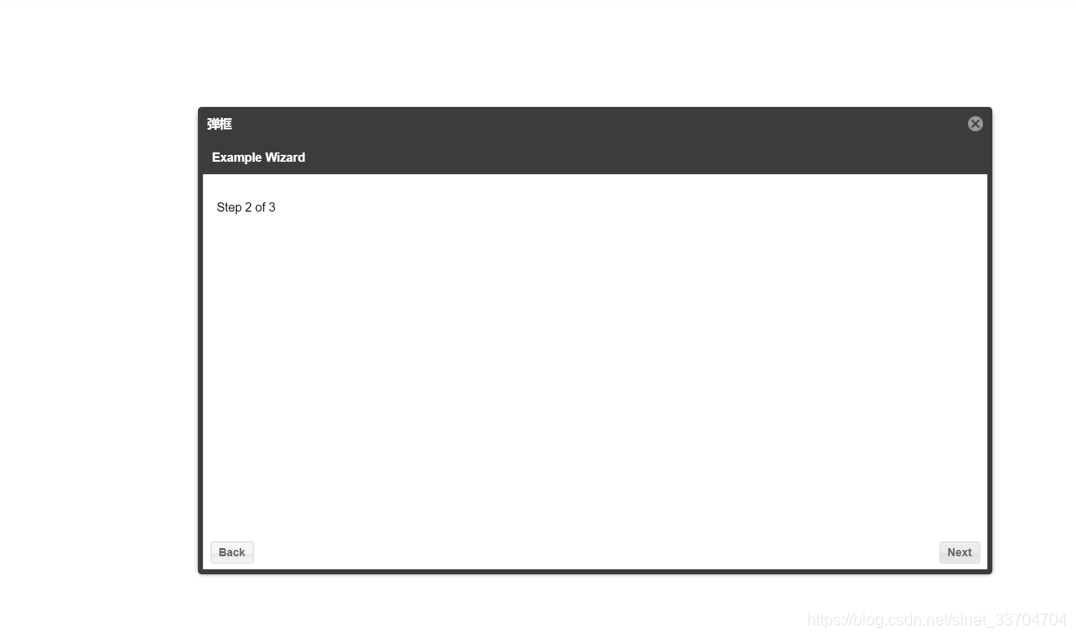
Ext4.2 Car布局 上一步下一步示例
示例 function addXXX(info){ var navigate = function(panel, direction){ var layout = panel.getLayout(); layout[direction](); Ext.getCmp('move-prev').setDisabled(!layou

English trip V1 - 7.My dream car 我梦想的车 Teacher:Lamb Key: famous for
中华In this lesson you will learn to describe an object(目标). 课上内容(Lesson) famous for 以…著称,闻名 国家(名词) 和 国家的(形容词) Countries and Nationalities国家(country的复数)和名族 Germany - German Germany i

yolov7训练数据集详细流程bike-car-person
一、准备深度学习环境 下载yolov7代码 下载完成解压放在自己的主目录 命名yolov7-4 二、 准备自己的数据集 1.进入主目录 2.进入data目录下把你的xml文件夹命名为Annotations,把你的存放图片文件夹命名为images 3.分别新建ImageSets、imagtest(里面存放测试图片)、labels(里面存放转换之后的yolo格式文件) 三、 1.2


Pytorch R-CNN目标检测-汽车car
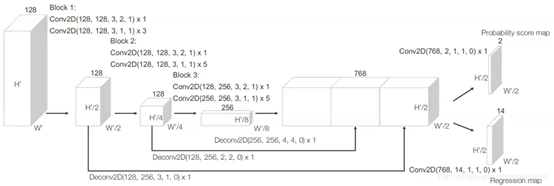
概述 目标检测(Object Detection)就是一种基于目标几何和统计特征的图像分割,它将目标的分割和识别合二为一,通俗点说就是给定一张图片要精确的定位到物体所在位置,并完成对物体类别的识别。其准确性和实时性是整个系统的一项重要能力。 R-CNN的全称是Region-CNN(区域卷积神经网络),是第一个成功将深度学习应用到目标检测上的算法。R-CNN基于卷积神经网络(CNN),线性回归,
UVa12661 Funny Car Racing(Dijkstra)
题意 给定n个点,m条边,起始点s,目标点t,求从起点s到终点t的最短距离。已经道路上的边e是每隔 e a e_a ea秒开启,再隔 e b e_b eb秒关闭,通过时间为 e t e_t et 思路 在计算边 e u v e_{uv} euv从u到v的时间时,用 d u d_u du表示到达u时的时间,如果 ( d u m o d ( e a + e b ) ) + e t <

java 建一个car_用java创建一个汽车类(Car),为其定义两个属性:颜色和型号,为该类创建两个构造方法...
满意答案 hui123wang 推荐于 2017.11.26 采纳率:42% 等级:11 已帮助:7097人 public class Car { private int color; // 颜色 0:未定义 1:红 2:黄 3:蓝 ... private int type ; // 型号 0:未定义 1:轿车 2:卡车 3:大巴 4:越野车 // 无形参的构造方法 public Ca