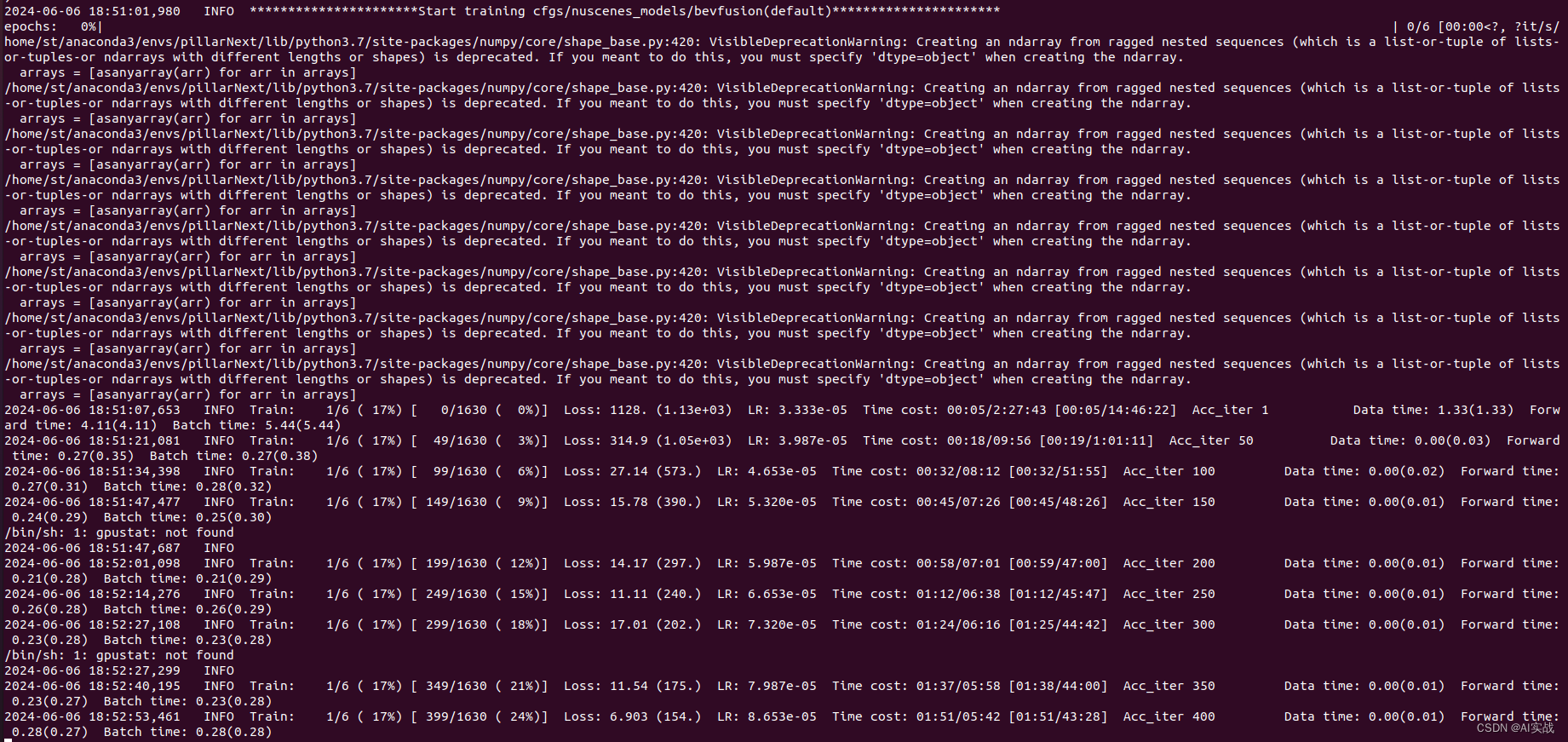
bevfusion专题

【3D目标检测】MMdetection3d——nuScenes数据集训练BEVFusion
引言 MMdetection3d:【3D目标检测】环境搭建(OpenPCDet、MMdetection3d) MMdetection3d源码地址:https://github.com/open-mmlab/mmdetection3d/tree/main?tab=readme-ov-file IS-Fusion源码地址:https://github.com/yinjunbo/IS-Fusion

【MIT-BEVFusion代码解读】第四篇:融合特征fuser和解码特征decoder
文章目录 1. fuser模块2. decoder模块2.1 backbone模块2.2 neck模块 BEVFusion相关的其他文章链接: 【论文阅读】ICRA 2023|BEVFusion:Multi-Task Multi-Sensor Fusion with Unified Bird‘s-Eye View RepresentationMIT-BEVFusion训练

CUDA-BEVFusion(1): 环境安装
文章目录 1. 查看ubantu配置2. 环境安装2.1 安装包下载2.1.1 tensorRT 下载2.1.2 CUDA 下载2.1.3 cuDNN 下载 2.2 安装2.2.1 cuda 安装2.2.2 cuDNN 安装2.2.3 tensorRT安装 3. 安装包下载 1. 查看ubantu配置 查看GPU的版本 sudo apt-get install pciut
使用OpenPCDet训练与测试多传感器融合模型BEVFusion,OPenPCdet代码架构介绍
引言 在自动驾驶领域,多传感器融合技术是一种常见的方法,用于提高感知系统的准确性和鲁棒性。其中,BevFusion是一种流行的融合方法,可以将来自不同传感器的数据进行融合,生成具有丰富信息的鸟瞰图(BEV)表示。在本文中,我们将介绍如何使用OpenPCdet框架训练和测试多传感器融合BevFusion 环境搭建与数据准备 安装OpenPCDet: 确标Python环境,确保安装PyTorc
模型部署 - BevFusion - (1) - 思路总结
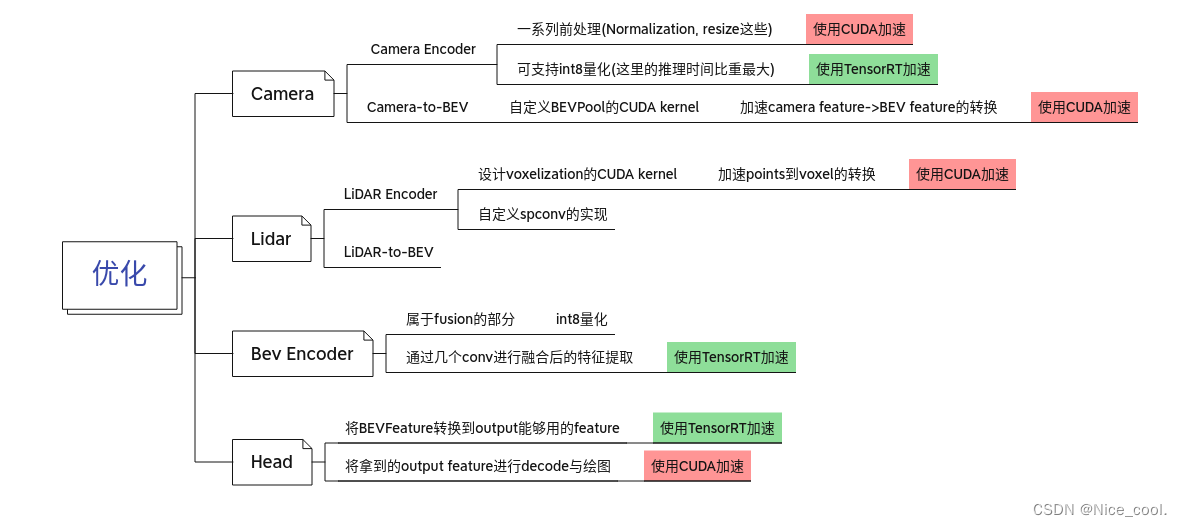
模型部署实践 - BevFusion 思路总结一、网络结构 - 总结1.1、代码1.2、网络流程图1.3、模块大致梳理 二、Onnx 的导出 -总体思路分析三、优化思路总结 学习 BevFusion 的部署,看了很多的资料,这篇博客进行总结和记录自己的实践 思路总结 对于一个模型我们要进行部署,一般有以下几个开发流程或思路: PyTorch 转 ONNX 转 TRTFP16

八. 实战:CUDA-BEVFusion部署分析-分析BEVFusion中各个ONNX
目录 前言0. 简述1. camera.backbone.onnx(fp16)2. camera.backbone.onnx(int8)3. camera.vtransform.onnx(fp16)4. fuser.onnx(fp16)5. fuser.onnx(int8)6. lidar.backbone.xyz.onnx7. head.bbox.onnx(fp16)总结下载链接参考

BevFusion (2): nuScenes 数据介绍及点云可视化
1. nuScenes 数据集 1.1 概述 nuScenes 数据集 (pronounced /nu:ːsiː:nz/) 是由 Motional (以前称为 nuTonomy) 团队开发的自动驾驶公共大型数据集。nuScenes 数据集的灵感来自于开创性的 KITTI 数据集。 nuScenes 是第一个提供自动驾驶车辆整个传感器套件 (6 个摄像头、1 个 LIDAR、5 个 RADAR、
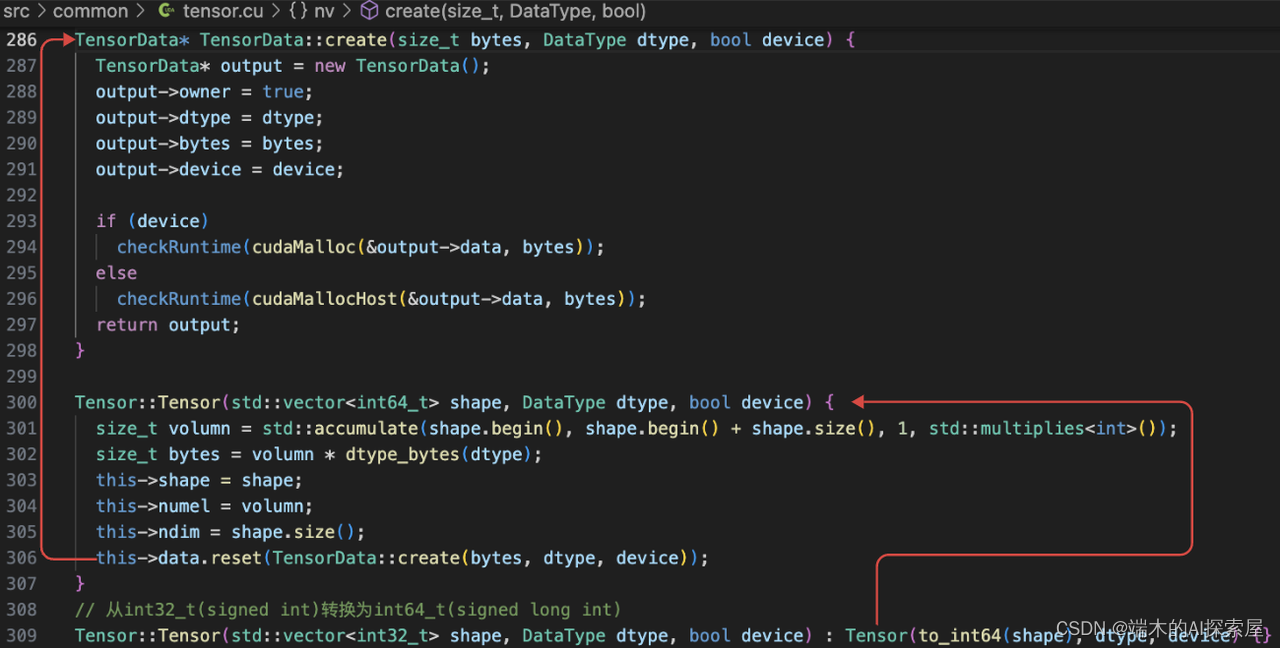
MIT-BEVFusion系列九--CUDA-BEVFusion部署4 c++解析pytorch导出的tensor数据
目录 创建流打印 engine 信息打印结果内部流程 启动计时功能加载变换矩阵并更新数据(重要)内部实现 该系列文章与qwe一同创作,喜欢的话不妨点个赞。 在create_core方法结束后,我们的视角回到了main.cpp中。继续来看接下来的流程。本章的重点在于pytorch导出的tensor数据的解析。 创建流 流用于表示一系列的命令(如内存传输命令和核函数
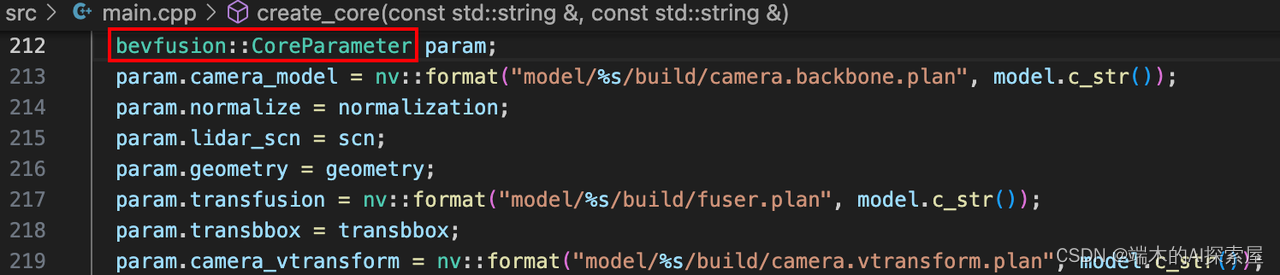
MIT-BEVFusion系列九--CUDA-BEVFusion部署2 create_core之参数设置
目录 加载命令行参数main 函数中的 create_core图像归一化参数体素化参数稀疏卷积网络参数真实世界几何空间参数 (雷达坐标系下体素网格的参数)解码后边界框的参数构建 bevfusion::Core 存储推理时需要的参数 本章开始,我们将一起看CUDA-BEVFusion的代码流程,看看NVIDIA部署方案的思路方法。 加载命令行参数 将代码debug起来,lau
MIT-BEVFusion系列八--onnx导出1 综述及相机网络导出
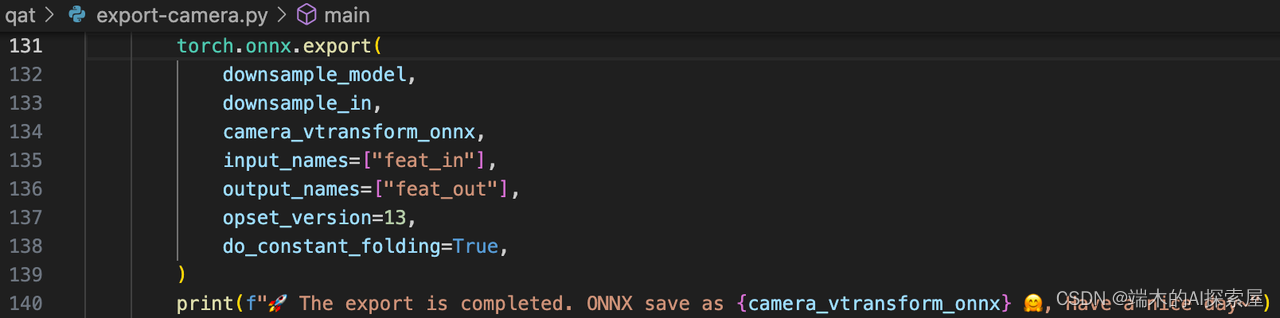
目录 综述export-camera.py加载模型加载数据生成需要导出成 onnx 的模块Backbone 模块VTransform 模块 生成 onnx使用 pytorch 原生的伪量化计算方法导出 camera.backbone.onnx导出 camera.vtransform.onnx 综述 bevfusion的各个部分的实现有着鲜明的特点,并且相互独立,特别是考虑到
MIT-BEVFusion系列八--onnx导出2 spconv network网络导出
这里写目录标题 export-scn.py加载模型设置每层的精度属性初始化输入参数导出模型model.encoder_layers 设置初始化参数设置 indice_key 属性更改 lidar backbone 的 forward更改lidar网络内各个层的forward带参数装饰器,钩子函数代码使用装饰器修改forward举例 跟踪模型推理初始化张量lidar.backbone 前向操作

八. 实战:CUDA-BEVFusion部署分析-学习spconv的优化方案(Implicit GEMM conv)
目录 前言0. 简述1. 什么是Implicit GEMM Conv2. Explicit GEMM Conv3. Implicit GEMM Conv4. Implicit GEMM Conv优化5. spconv和Implicit GEMM Conv总结下载链接参考 前言 自动驾驶之心推出的 《CUDA与TensorRT部署实战课程》,链接。记录下个人学习笔记,仅供自己参

八. 实战:CUDA-BEVFusion部署分析-导出带有spconv的SCN网络的onnx
目录 前言0. 简述1. 使用spconv进行SCN的推理测试2. 导出onnx3. 补充-装饰器+钩子函数总结下载链接参考 前言 自动驾驶之心推出的 《CUDA与TensorRT部署实战课程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第八章——实战:CUDA-BEVFusion部署分析,一起来学习导出带有 spconv 的 SCN 网络的 onnx

八. 实战:CUDA-BEVFusion部署分析-环境搭建
目录 前言0. 简述1. CUDA-BEVFusion浅析2. CUDA-BEVFusion环境配置2.1 简述2.2 源码下载2.3 模型数据下载2.4 基础软件安装2.5 protobuf安装2.5.1 apt 方式安装2.5.2 源码方式安装 2.6 编译运行2.6.1 配置 environment.sh2.6.2 利用TensorRT构建模型2.6.3 编译运行程序 2.7 拓展-P

bevfusion 学习笔记
目录 tensorrt ros部署: 也依赖ros2 c++ ros2安装指导: 相机标定工具源码: 官方github,部分模型开源 tensorrt ros部署: https://github.com/linClubs/BEVFusion-ROS-TensorRT 也依赖ros2 c++ GitHub - newintelligence4/BEVfusion_pre

三. LiDAR和Camera融合的BEV感知算法-BEVFusion实战
目录 前言1. BEVFusion实战 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第三章——LiDAR和Camera融合的BEV感知算法,一起去学习下 BEVFusion 的相关代码 课程大纲可看下面的思维导图 1. BEVFusion实战 实战部分先放放吧,感兴趣的可以点击 h
BEVFusion复现 (Ubuntu RTX3090)
https://github.com/ADLab-AutoDrive/BEVFusion 1.环境安装 我的机器是RTX3090,CUDA11.1 1.创建虚拟环境 conda create -n bevfusion python=3.8.3 2.安装PyTorch 和 torchvision pip install torch==1.8.0+cu111 torchvision==0.9

【多传感器融合】BEVFusion: 多任务-多传感器融合框架 ICRA 2023
前言 BEVFusion其实有两篇, 【1】BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework. NeurIPS 2022 | 北大&阿里提出 【2】BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation I
【论文阅读】以及部署BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework BEVFusion:一个简单而强大的LiDAR-相机融合框架 NeurIPS 2022 多模态传感器融合意味着信息互补、稳定,是自动驾驶感知的重要一环,本文注重工业落地,实际应用 融合方案: 前融合(数据级融合)指通过空间对齐直接融合不同模态的原始传感器数据。 深度融合
BEVfusion环境配置笔记
论文文章:BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation 论文代码:bevfusion 下载项目 原文推荐用nvidia docker,其实可以不用,直接: cd home && git clone https://github.com/mit-han-lab/bevf

BEVFusion代码复现实践
bevfusion代码复现环境部署 mit版本代码github地址本人代码仓库地址 ,求个☆^_^Fast-BEV代码复现实践BEVFustion-TensorRT部署BEV各算法环境部署实战汇总如果觉得本文章可以,一键三连支持一波,^_^部署有问题的小伙伴欢迎留言和加Q裙-472648720 1 环境安装 python-3.8, torch-1.10.0, cuda-11.3不要问其他版本