bag专题

使用 rosbag play 更改bag包发布的话题名称
在ROS开发中,有时我们需要回放已记录的ROS包文件(.bag),并将其中某个话题的数据重新映射到一个新的话题。这在数据处理、调试和系统集成时非常有用。例如,我们可能有一个记录了点云数据的ROS包文件,其中点云数据发布在 /kitti/velo/pointcloud 话题上,但我们的系统期望从 /velodyne_points 话题接收点云数据。这时,我们可以使用 rosbag play 命令来
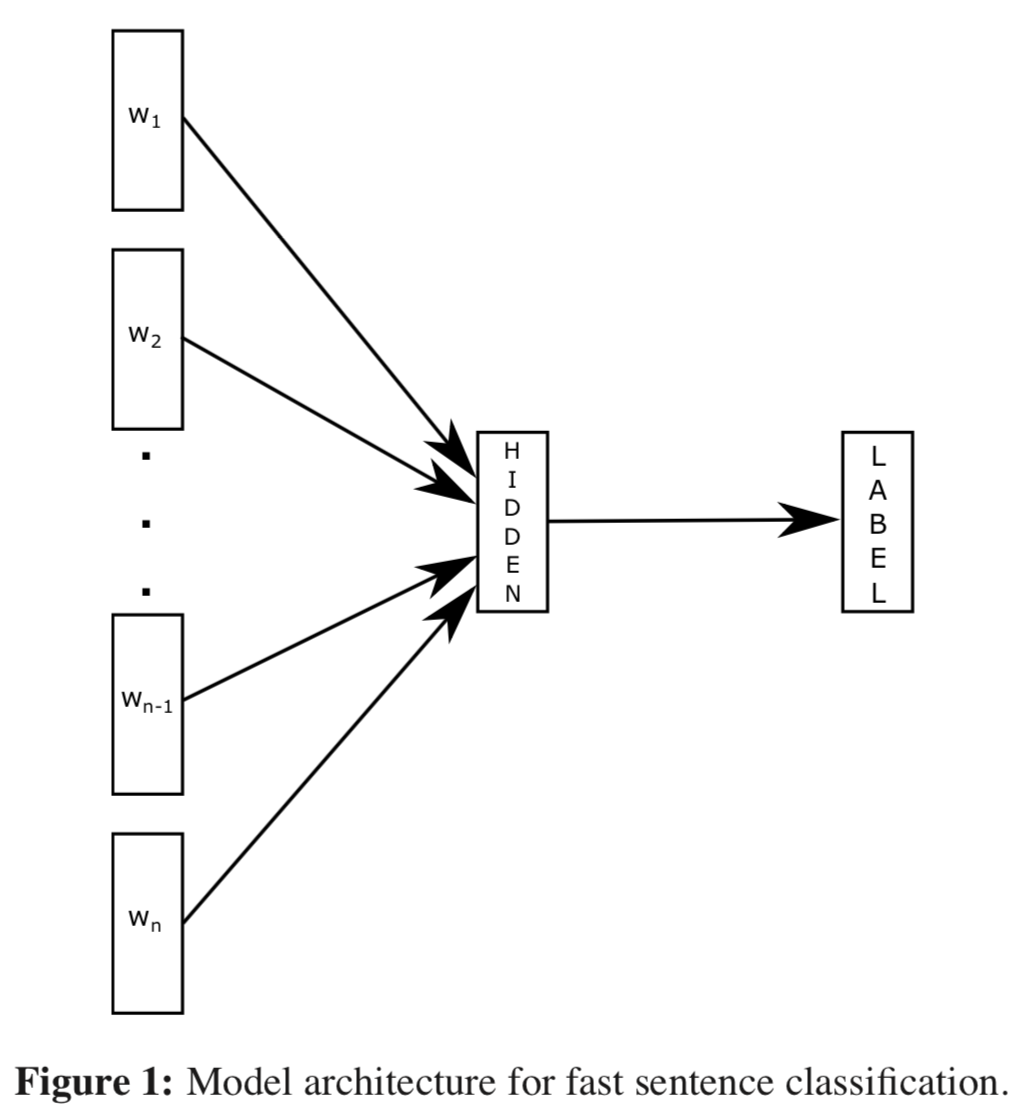
论文阅读:《Bag of Tricks for Efficient Text Classification》
重磅专栏推荐: 《大模型AIGC》 《课程大纲》 《知识星球》 本专栏致力于探索和讨论当今最前沿的技术趋势和应用领域,包括但不限于ChatGPT和Stable Diffusion等。我们将深入研究大型模型的开发和应用,以及与之相关的人工智能生成内容(AIGC)技术。通过深入的技术解析和实践经验分享,旨在帮助读者更好地理解和应用这些领域的最新进展 https://blog.csdn.

Bag标签之一行代码实行中文分词
用法: <Bag id=书包名 act=2words[name=key] [gap=字符] [quotes=引号]>中英文混合内容</Bag> 例0: 默认分词(无gap和quotes参数) <bagid=pPage act=2words name=words>我喜欢黄色高领T恤衫</bag>输出分词结果 <p><b>结果词组: </b>@{pPage:words}</p>

Bag标签之删除书包中的一条数据
删除书包中的一条数据 查询 <esql module=help id=list>SelectID,Subject,Writer,DayTimeFromMessages</esql>删除前循环输出 <table border=1><tr><th>ID</th><th>主题</th><th>作者</th><th>时间</th></tr><chtml><for bags=list

Bag标签之把字符串分割成数组,返回一个存放数组数据的书包(Bag)
把字符串分割成数组,返回一个存放数组数据的书包(Bag): 操作 <Bag id=test act=splitgap="/">a/b/c/d</Bag>把字符串 a/b/c/d数组,返回书包 test,按关键字 test0、 test1、 test2...取出分割后的值 输出分割后的值 <for end=0 start=@{test:getWidt
修复bag.active文件
文章目录 概要修复过程 概要 在ROS(Robot Operating System)中,rosbag 是一个非常有用的工具,它用于记录和回放ROS的消息数据。当你使用 rosbag record 命令时,它会记录数据到一个bag文件中。在记录过程中,这个文件会有 .active 后缀,表示这是一个当前正在写入的活跃文件。 如果你在文件系统上看到了一个带有 .active 后缀
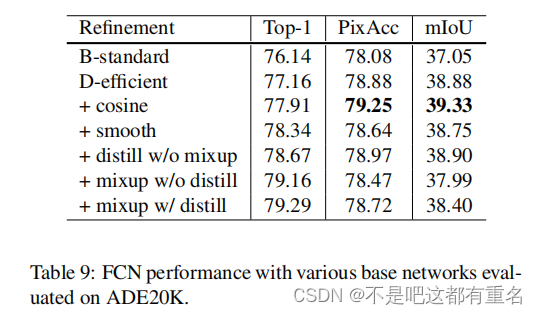
【论文精读】Bag of Tricks for Image Classification with Convolutional Neural Networks
这篇文章比较早了,2018年的 摘要 最近在图像分类研究方面取得的大部分进展可以归功于训练程序的改进,如数据增强和优化方法的改变。然而,在文献中,大多数改进要么作为实现细节简要提到,要么只在源代码中可见。在本文中,我们将检验这些改进的集合,并通过消融研究来评估它们对最终模型准确性的影响。我们将展示,通过将这些改进结合在一起,我们能够显著地改进各种CNN模型。例如,我们在ImageNet上将ResN
Ubuntu20.04配置Kinect 2.0驱动安装和ROS环境下配置以及录制bag包和制作ORB-SLAM数据集
1. 安装libfreenect2 1.1 下载官方文件 git clone https://github.com/OpenKinect/libfreenect2.gitcd libfreenect2 1.2 安装build工具 sudo apt-get install build-essential cmake pkg-config 1.3 安装libusb sudo apt-

oob(out-of-bag)和关于bagging的更多讨论
不用 train_test_split #%% 使用oobfrom sklearn.tree import DecisionTreeClassifierfrom sklearn.ensemble import BaggingClassifierbagging_clf = BaggingClassifier(DecisionTreeClassifier(),n_estimators=500,m
论文浅尝 | BAG:面向多跳推理问答得双向 Attention 实体图卷积网络
论文笔记整理:谭亦鸣,东南大学博士生,研究兴趣:知识图谱问答 来源:NAACL 2019 链接:https://www.aclweb.org/anthology/N19-1032/ 实现多跳推理问答需要模型能够充分理解文本和 query 之间的关系,本文提出了一种双向注意力实体图卷积网络(BAG),该方法利用实体图中的节点及实体图与query之间的attention信息处理上
ros | 怎么修复.bag.active文件成.bag
第一步生成中间文件.orig.active rosbag reindex 2024-03-19-15-20-36.bag.active 2024-03-19-15-20-36.bag.active 是我文件的名字 中间生成的文件不用管 第二步还原为.bag 文件 rosbag fix 2024-03-19-15-20-36.bag.active result.bag 同样的 2

【rosbag】rosbag命令--查看提取bag中的内容
1.rosbag info 查看bag消息 rosbag info --.bag topics是其中的话题内容,/imu中只写了包含imu的数据,但是imu是9轴的,到底磁力计信息是否包含在其中呢? 2.将bag中的某个话题转为txt 将file_name.bag文件中topic_name话题的消息转换到Txt_name.txt文件中: rostopic echo -b file_na

ROS2高效学习第九章 -- ros2 bag之编程实现包录制
ros2 bag之编程实现包录制 1 前言和资料2 正文2.1 bag_record 功能介绍2.2 bag_operator 之 bag_record 3 总结 1 前言和资料 在ROS2高效学习第二章 – ros2常用命令和相关概念学习,熟练玩起来小乌龟样例这篇博客里,我们简单介绍了 ros2 的录包和播包命令,以及与 ros1 包格式的区别。更早一点,我们在ROS高效入门第

rqt播放bag包时某些topic播放失败----解决思路
在使用rqt播放bag包时,有时会出现某些topic无法播放的情况。 报错现象是UnicodeDecodeError: 'ascii' codec can't decode byte 0xe6 in position 1905等相关类型的错误。 原因是由于自定义消息中的string类型变量编码格式为UTF-8格式编码,解码为ASCII码时会报错。 解决思路是,打开/opt/ros/jade/
bag文件转pcd文件
一 ros的rviz能够播放bag 1.运行ros: $ roscore 2.运行rviz: $ rosrun rviz rviz 3.运行rosbag: $ rosbag play XXX.bag rviz需要添加PointCloud2,然后再PointCloud2的属性里面的Topic选择对应的topic。 二 bag文件转PCD文件 参考:http://wiki.ros.or

ROS运行bag文件及其坐标系转换
参考 https://blog.csdn.net/adamshan/article/details/82901295(adamshan大神博客24期激光雷达的地面-非地面分割和pcl_ros实践) https://blog.csdn.net/elsa211/article/details/88209247 https://blog.csdn.net/xu_fengyu/article/det

解决ROS中 rosbag play bag 包遇到:Required ‘op‘ field missing问题
在Robot Operating System (ROS)中使用rosbag play命令回放bag文件时,可能会遇到一个错误消息:“Required 'op' field missing”。这个问题通常指示bag文件有损坏或格式不兼容,阻止了正常的消息回放。本文档将指导你如何诊断和解决这个问题。 问题原因 遇到“Required 'op' field missing”错误的原因主要有:

AtCoder Beginner Contest 332 --- E - Lucky bag --- 题解
目录 E - Lucky bag 题目大意: 思路解析: 代码实现: E - Lucky bag 题目大意: 思路解析: 在方差中平均值只与输入有关为定值。看到数据范围为 2 <= D <= N <= 15,想到是否能使用状压dp来进行解答。 dp[i][j] (i为二进制)表示 i二进制状态下选择了这么多个物品,
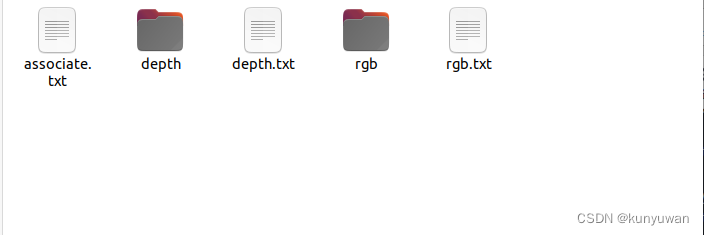
激光雷达LiDAR和相机的.bag数据解析与对齐
LiDAR数据解析 Ubuntu18.04 系统,已安装ROS 查看bag信息,在相应文件夹下打开终端 rosbag info xxx.bag 获得对应的topics topics: /velodyne_points 940 msgs : sensor_msgs/PointCloud2/zed2i/zed_node/le
NLP_Bag-Of-Words(词袋模型)
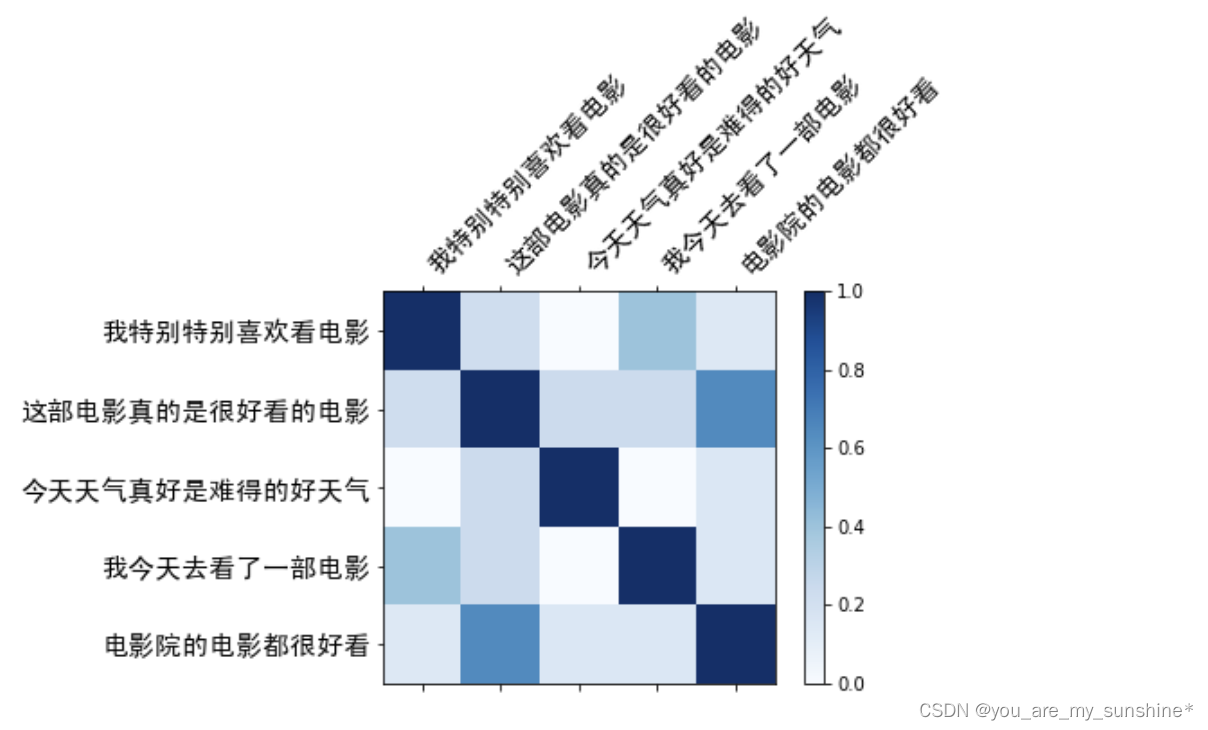
文章目录 词袋模型用词袋模型计算文本相似度1.构建实验语料库2.给句子分词3.创建词汇表4.生成词袋表示5.计算余弦相似度6.可视化余弦相似度 词袋模型小结 词袋模型 词袋模型是一种简单的文本表示方法,也是自然语言处理的一个经典模型。它将文本中的词看作一个个独立的个体,不考虑它们在句子中的顺序,只关心每个词出现的频次,如下图所示 用词袋模型计算文本相似度 1.构建实

目标识别:Bag-of-words表示图像
转载至:https://www.cnblogs.com/shihuajie/p/5782515.html BOW (bag of words) 模型简介 Bag of words模型最初被用在文本分类中,将文档表示成特征矢量。它的基本思想是假定对于一个文本,忽略其词序和语法、句法,仅仅将其看做是一些词汇的集合,而文本中的每个词汇都是独立的。简单说就是讲每篇文档都看成一个袋子(因为里面装的都是词

多示例论文泛读--2018-1-MIRSVM_ Multi-instance support vector machine with bag representatives
题目 MIRSVM: Multi-instance support vector machine with bag representatives 包代表的多实例支持向量机 符号系统 符号含义 n n n包的个数 m m m示例的个数 d d d示例的属性个数 B = { B 1 , … , B n } \mathcal{B}=\left\{\mathcal{B}_{1}, \ldots,
【MATLAB第92期】基于MATLAB的集成聚合多输入单输出回归预测方法(LSBoost、Bag)含自动优化超参数和特征敏感性分析功能
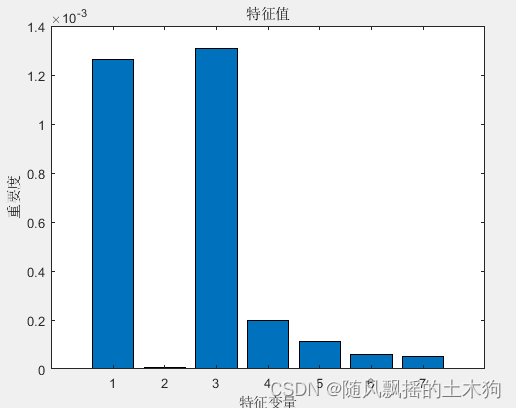
【MATLAB第92期】基于MATLAB的集成聚合多输入单输出回归预测方法(LSBoost、Bag)含自动优化超参数和特征敏感性分析功能 本文展示多种非常用多输入单输出回归预测模型效果。 注:每次运行数据训练集测试集为随机,故对比不严谨,不能完全反映模型效果。 样本数据选用7变量1因变量。 %% 导入数据res = xlsread('数据集.xlsx');%% 划分训练集和测试集