本文主要是介绍bag文件转pcd文件,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一 ros的rviz能够播放bag
1.运行ros: $ roscore
2.运行rviz: $ rosrun rviz rviz
3.运行rosbag: $ rosbag play XXX.bag
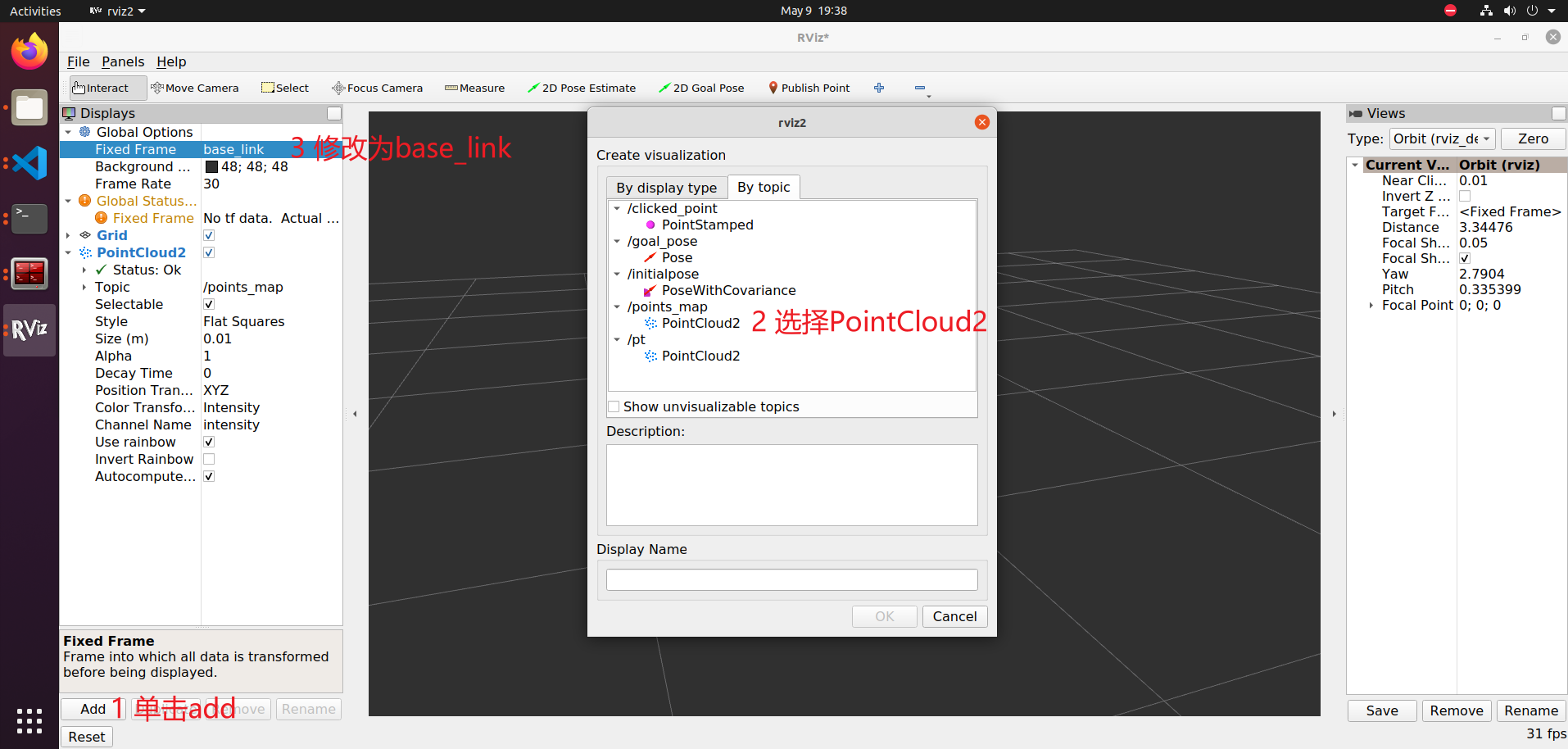
rviz需要添加PointCloud2,然后再PointCloud2的属性里面的Topic选择对应的topic。
二 bag文件转PCD文件
参考:http://wiki.ros.org/pcl_ros 方法一:bag_to_pcd
$ rosrun pcl_ros bag_to_pcd <input_file.bag> <topic> <output_directory>example:
$ rosrun pcl_ros bag_to_pcd data.bag /velodyne_points ./pcd
方法二:pointcloud_to_pcd
一个终端通过ros发送messages,如:$ rosbag play XXX.bag另一个终端接收,如:$ rosrun pcl_ros pointcloud_to_pcd input:=/velodyne_pointsps:只试了方法一,方法二未试
这篇关于bag文件转pcd文件的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!