pcd专题

从PCD文件写入和读取点云数据
(1)学习向PCD文件写入点云数据 建立工程文件ch2,然后新建write_pcd.cpp CMakeLists.txt两个文件 write_pcd.cpp : #include <iostream> //标准C++库中的输入输出的头文件#include <pcl/io/pcd_io.h> //PCD

ROS的pointcloud2 格式和PCD格式总结以及转换
pointcloud2 这个是ROS定义的消息类型, 它的结构如下: Header header# 2D structure of the point cloud. If the cloud is unordered, height is# 1 and width is the length of the point cloud.uint32 heightuint32 width# De
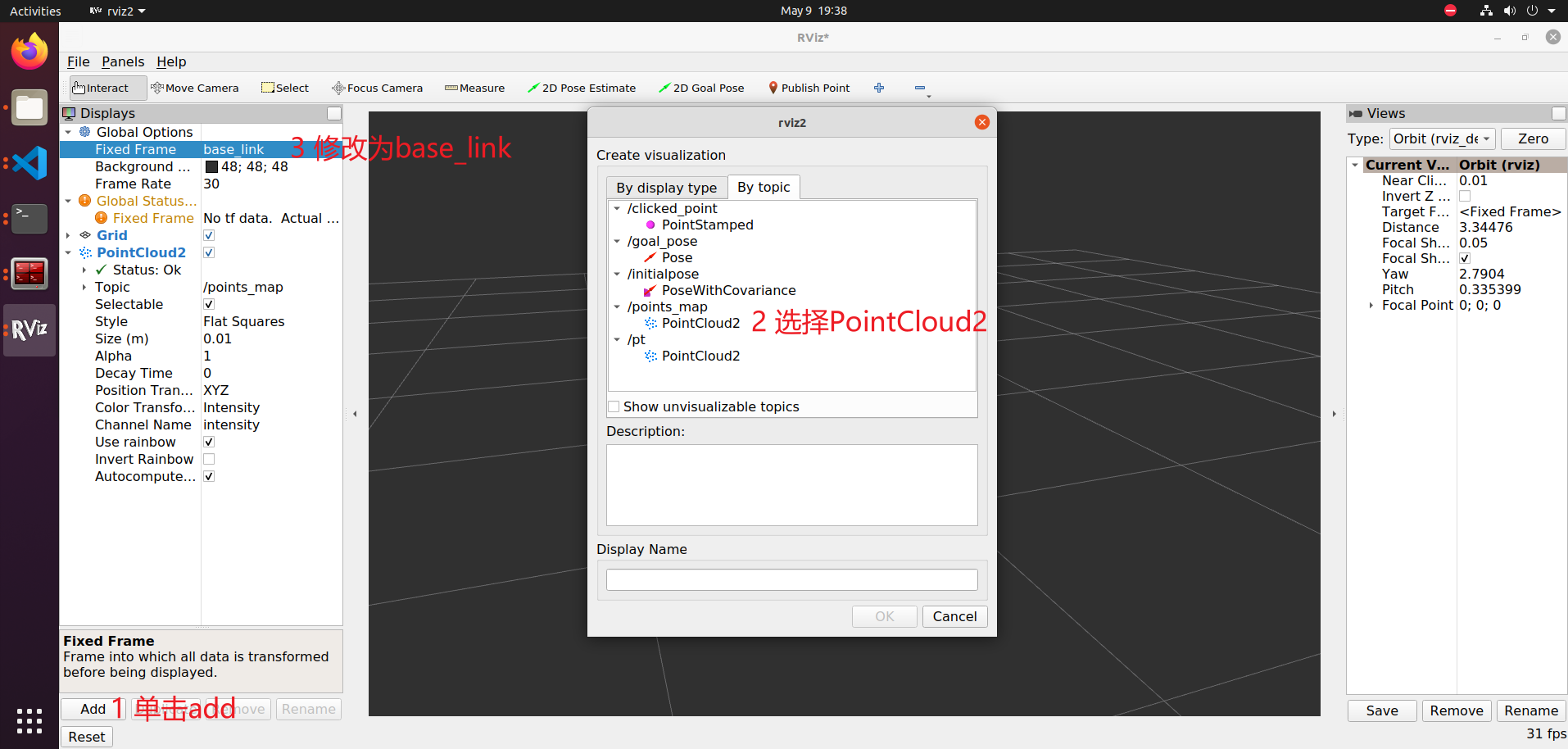
ros2编写pcl节点加载pcd文件
初次学习ros2和pcl,尝试在ros2中创建节点,加载pcd文件,并在rviz中进行可视化,记录一下整个过程。 编辑环境 ubuntu20.04 + ros2_foxy 创建节点 mkdir -p proj_ws_pcl/src #创建工程文件夹cd proj_ws_pcl/src #创建源码文件夹ros2 pkg create --build-type=ament_cmake --
pcd点云江湖之处处碰壁:点云文件pcd加载02
江湖好汉,休走,废了半天力气把threejs自带的代码搬迁到自己项目中了,高高兴兴给领导看。领导一句话,顿时无奈:领导曰:点云单色太丑,能不能按照分类展示? 一句话难道英雄好汉,妈呀,全部白费,去整理资料,问问gpt 去。点云文件pcd基础介绍-CSDN博客 pcd点云江湖之初探江湖:点云文件pcd加载01-CSDN博客 通过资料梳理大概对点云分类有所了解: 1)利用three

C++笔记之调用PCL库显示PCD文件的点云
C++笔记之调用PCL库显示PCD文件的点云 —— 2024-05-05 杭州 code review! 文章目录 C++笔记之调用PCL库显示PCD文件的点云1.运行2.点云pcd文件github下载地址2.main.cpp3.CMakeLists.txt 1.运行 2.点云pcd文件github下载地址 https://github.com/luolai

ROS中发布GNSS和点云PCD信息
1.发布gnss ros::Publisher pub = nh.advertise<nmea_msgs::Sentence>("/nmea_sentence", 1);// Publish all topics with the same ROS time stamp.ros::Time topic_publish_time = ros::Time::now();// === NMEA S

PCL读取pcd点云文件
【版权声明】本文为博主原创文章,未经博主允许严禁转载,我们会定期进行侵权检索。 随着三维数据在计算机视觉和机器人领域的广泛应用,点云数据成为了一个重要的数据形式。PCD(Point Cloud Data)是一种常见的点云数据格式,而PCL(Point Cloud Library)则是一个用于处理点云数据的强大库。在本篇博文中,我们将介绍如何使用PCL库来读取各种格式的PCD点

7、octomap_sever安装及demo、自己的pcd点云数据测试,基于八叉树的三维的栅格地图构建
octomap_sever安装及demo、自己的pcd点云数据测试 基于八叉树的三维的栅格地图构建 文章开头先贴一下:高博关于八叉树的博客 1.编译octomap 新建一个目录用于拷贝octomap代码。 如果没有git请安装git,然后拷贝代码: sudo apt-get install gitgit clone https://github.com/OctoMap/octomap
bag文件转pcd文件
一 ros的rviz能够播放bag 1.运行ros: $ roscore 2.运行rviz: $ rosrun rviz rviz 3.运行rosbag: $ rosbag play XXX.bag rviz需要添加PointCloud2,然后再PointCloud2的属性里面的Topic选择对应的topic。 二 bag文件转PCD文件 参考:http://wiki.ros.or

保护模式 x86 PDE-PTE中的PWT_PCD位
PDE-PTE中的PWT_PCD位 目录 文章目录 目录先了解CPU缓存PWT 位 [3]PCD 位 [4] 先了解CPU缓存 1>CPU缓存是位于CPU与物理内存之间的临时存储器,他的容量比内存小得多,但是交换速度却比内存要快得多. 2>CPU缓存可以做的很大,有几K,几十K,几百K甚至上M的也有. CPU缓存与TLB的区别: TLB : 线性地址<----->物理地

3D激光SLAM点云地图pcd转导航可用的2D栅格地图
本文旨在帮助读者将激光点云地图转为2D栅格地图,以便完成路径规划与导航。本方法将pcd转为pgm的原理是将接收到的点云信息以"/map"话题的形式发布,用map_server来接收"/map"话题,保存2D栅格地图! 废话不多说,直接开始! 一、安装pcd2pgm #创建工作空间mkdir -p ~/pcd2pgm_ws/srccd ~/pcd2pgm_ws/srccatkin_ini
三维点云数据pcd与ply格式相互转换/点云合并
PCL配置与下载参考:https://blog.csdn.net/stq054188/article/details/106408641 ① ply转pcd #include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/io/ply_io.h>#include <pcl/console/print.h>#include <pcl/

三维点云显示软件/方法(xyz, pcd, ply格式)
① .xyz格式的三维点云一般我用OpenCV生成,显示使用VTK库,需要自己编译,然后用OpenCV viz模块显示,介绍https://blog.csdn.net/stq054188/article/details/104799702, 下面是效果: ② .ply格式的三维点云,比较常见,显示使用MeshLab,直接搜索即可下载 另外对于.pcd格式和.ply格式的三维点云都可以用Cl

cloudcompare 编译安装解决无法load pcd文件问题
参考 https://github.com/CloudCompare/CloudCompare/blob/master/BUILD.md sudo apt install libqt5svg5-dev libqt5opengl5-dev qt5-default qttools5-dev qttools5-dev-tools libqt5websockets5-devgit clone --re
雷达点云数据.pcd格式转.bin格式
雷达点云数据.pcd格式转.bin格式 注意,方法1原则上可行,但是本人没整好pypcd的环境 方法2是绝对可以的。 方法1 1 源码如下: def pcb2bin1(): # save as bin format''''''import os# import pypcdfrom pypcd import pypcdimport numpy as npfrom tqdm import
点云TXT转化为pcd格式
// changepcd.cpp : 定义控制台应用程序的入口点。//#include "stdafx.h"#include <pcl/io/pcd_io.h>#include<iostream>using namespace std;int numofPoints(char* fname){int n=0;int c=0;FILE *fp;fp = fopen(fname,"r");d

pcl\io\pcd_io.h(369): error C2589: “(”:“::”右边的非法标记
pcl\io\pcd_io.h(369): error C2589: “(”:“::”右边的非法标记 问题 利用pcl库中的#include <pcl/io/pcd_io.h>库写入PCD文件,出现如下报错信息: f:\pcl 1.9.0\include\pcl-1.9\pcl\point_traits.h : warning C4819: 该文件包含不能在当前代码页(936)中表示的字符

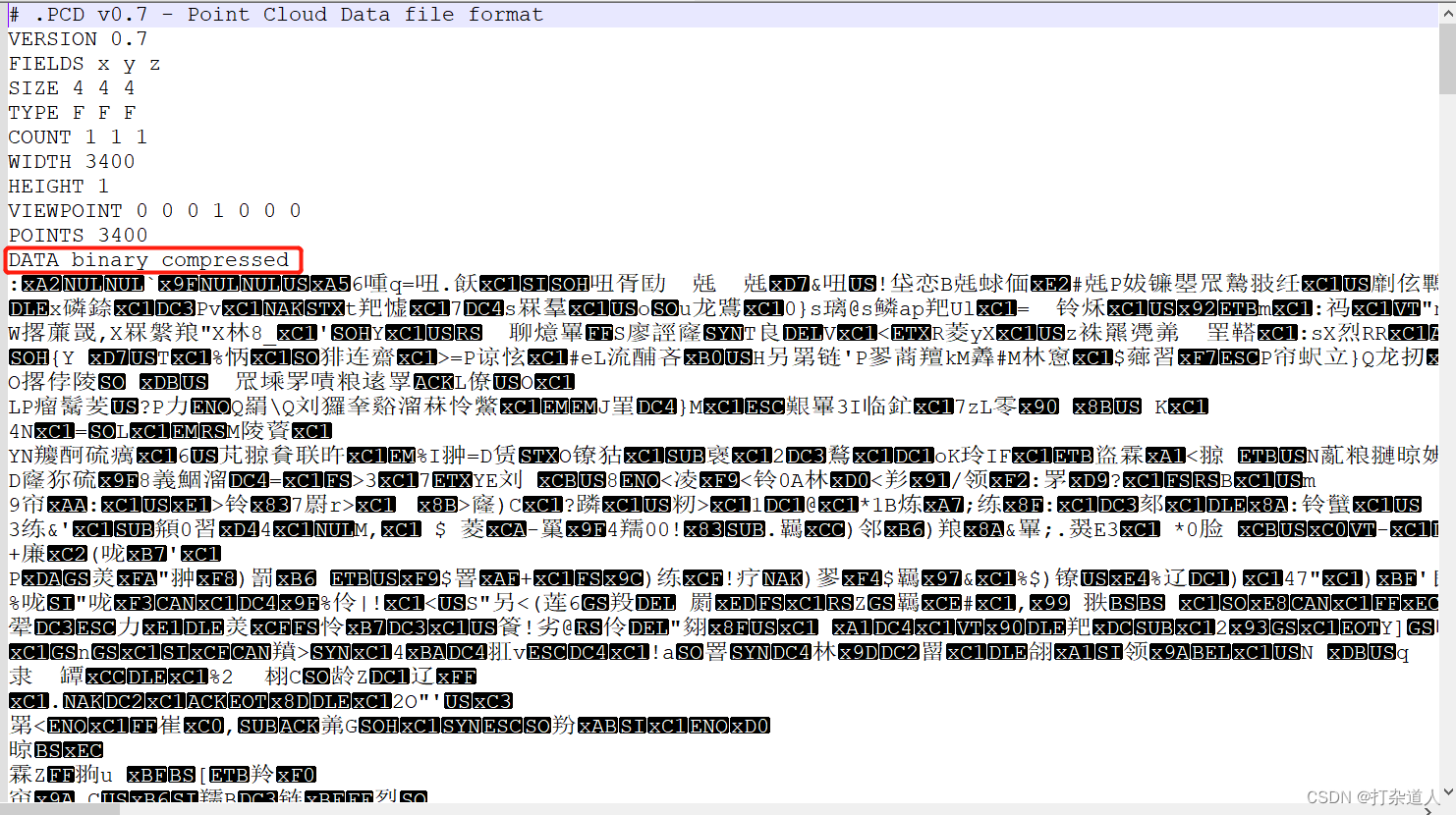

PCD格式点云文件结构及在线查看工具
本文档描述了 PCD(点云数据)文件格式及其在点云库(PCL)中的使用方式。可以使用NSDT 3DConvert 在线预览查看PCD格式的点云数据文件。 推荐:用 NSDT编辑器 快速搭建可编程3D场景 1、为何定义新的点云数据文件格式? PCD 文件格式并不是要重新发明轮子,而是为了补充现有的文件格式,这些文件格式由于某种原因不支持 PCL 为 n 维点云处理带来的某些扩展。

从PCD文件中读取与保存点云文件
序列化和反序列化是将数据结构或对象转换为字节流(序列化)以及将字节流还原为数据结构或对象(反序列化)的过程。 在计算机科学中,当我们需要将数据从内存中保存到磁盘或通过网络传输时,通常需要进行序列化操作。序列化将数据结构或对象转换为一个字节流的形式,以便能够进行持久化存储或传输。这样,在需要时就可以从字节流中还原出原始的数据结构或对象。 反序列化则是
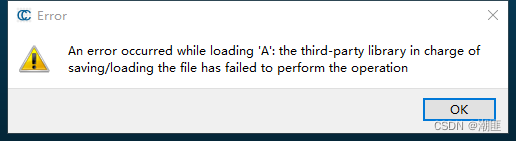
文件路径中并没有中文,但是cloudcompare打开pcd文件时还是报错,怎么办?the third-party library in charge of saving/loading the fi
cloudcompare打开pcd文件时报错,文件路径中并没有中文,文件路径: C:\Users\Administrator\Desktop\cloudcompare 文件名: A.pcd 报错消息: [09:11:39] An error occurred while loading 'A': the third-party library in charge of saving
iis 设置pcd文件的 MIME 类型,如何设置
要在IIS中设置PCD文件的MIME类型,可以按照以下步骤进行操作: 打开IIS管理器(可以在开始菜单中搜索IIS来找到)。 在IIS管理器左侧面板中,展开"网站",然后选择您要设置MIME类型的网站。 在右侧的"网站"窗格中,展开"MIME类型"节点,然后选择"添加"按钮。 在弹出的"添加/编辑 MIME 类型"对话框中,为新的MIME类型输入以下信息: 扩展名:输入".pcd",这是

【Linux】进程控制块PCD结构(tack_struct)
tack_struct结构图: 一、task_struct 结构描述 1.进程状态(State) 进程执行时,它会根据具体情况改变状态。进程状态是调度和对换的依据。Linux 中的 进程主要有如下状态,如表4.1 所示。 (1)可运行状态 处于这种状态的进程,要么正在运行、要么正准备运行。正在运行的进程就是当前进程 (由 cu

png格式的深度图像转pcd点云格式(C++)
操作系统:Windows 10 IDE:Visual Studio 2017(community) 编程语言:C++ 主要环境:OpenCV、PCL 深度图像格式:png 点云格式:pcd 设备:深度相机 1. 应用背景 在进行点云处理时,提供的数据为png格式的深度图片,不方便在PCL框架下使用,需要将对应的深度图像(depth.png)与彩色图像(rgb.png)对应转换成pcd格式。 本