autoware专题

Autoware 定位之ndt定位(八)
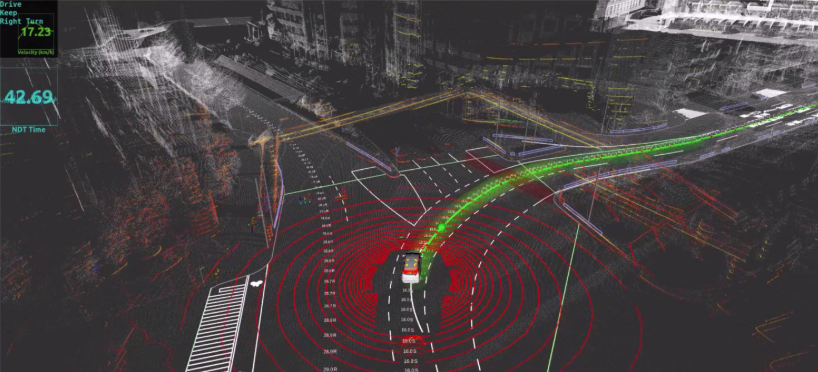
0. 简介 这一讲按照《Autoware 技术代码解读(三)》梳理的顺序,我们来说一说Autoware中的ndt定位,这个软件包有两个主要功能:1. 通过扫描匹配进行位置估计,2. 通过ROS服务使用蒙特卡洛方法估计初始位置 1. 代码阅读 1.1 debug.cpp 这段代码是一个用于生成用于调试的可视化标记数组的函数。它接受时间戳、坐标系、缩放比例、粒子信息和索引作为输入,并返回一个

ubuntu16.04下的autoware 安装(source 安装)
1. 条件 1.1 硬件条件 (4核16G亲测可用) CPU内核数:8 RAM:32G 物理内存:64G 1.2 软件条件 ROS kinetic (Ubuntu 16.04)OpenCV 2.4.10 or higherQt 5.2.1 or higherCUDA (非必须)FlyCapture2 (非必须)Armadillo (非必须) 2. 安装系统依赖 % sudo
Autoware使用(一)
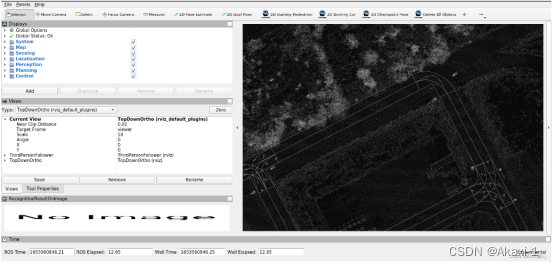
一 加载地图 1. 在Runtime Manager 的 Map 子栏目下导入数据 Point Cloud 导入 .autoware/data/map/pointcloud_map下的图片, 然后点击 Point Cloud 按钮 Vector Map 导入 .autoware/data/map/vector_map下的数据, 然后点击 Vector Map 按钮 TF 导入 导入 .a

【Autoware】Autoware.universe安装过程与问题记录
😏★,°:.☆( ̄▽ ̄)/$:.°★ 😏 这篇文章主要介绍Autoware.universe安装过程与问题记录。 无专精则不能成,无涉猎则不能通。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下,下次更新不迷路🥞 文章目录 :smirk:1. 项目介绍:blush:2. 环境配置:satisfied:3. 示例运行 😏1. 项目介绍 最
Autoware内容学习与初步探索(一)
0. 简介 之前作者主要是基于ROS2,CyberRT还有AutoSar等中间件完成搭建的。有一说一,这种从头开发当然有从头开发的好处,但是如果说绝大多数的公司还是基于现成的Apollo以及Autoware来完成的。这些现成的框架中也有很多非常好的方法。目前作者打算抽一些时间来整理这部分资料,并根据自己学习内容进行介绍。 目前使用的主流的无人驾驶开源项目框架,主要是Autoware和百度的Ap

何为Autoware【更新中...
以下是AI解释 Autoware是一个开源的自动驾驶软件平台,旨在提供一套完整的自动驾驶解决方案。它是由日本Apex.AI公司和The Autoware Foundation等组织支持和开发的。Autoware提供了丰富的功能和工具,使开发者能够构建、测试和部署自动驾驶系统。 以下是Autoware的一些主要特点和组成部分: 传感器数据处理:Autoware支持各种传感器数据的处理,包括激
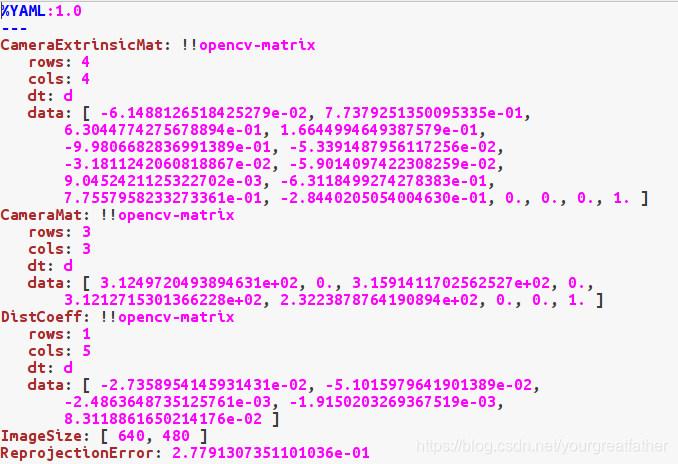
【学习记录】autoware标定相机与激光雷达外参
一、autoware选择 这里踩了好几个坑,首先autoware作为一个无人驾驶知名框架,其内部实际上是有两套标定的东西的,这一点绝大多数博客没有提到。其中最常用的是一个叫标定工具箱的东西,这个ros包已经在1.10往后的版本中被删掉了,所以网上的资料都是基于前人提取出来的代码进行单独编译然后运行,这种标定方法需要用到标定板,个人感觉比较麻烦,用这个标定工具箱,最好是在车上的工控机直接装好相应的

autoware.universe中所有的多传感器融合代码解读,一看就懂!
目录 融合的前提条件case1:vision_roi与cluster融合融合过程 case2:vision_roi与centerPoint融合融合过程小结: case3:vision_roi与pointcloud融合融合过程 总结 融合的前提条件 计算视觉ROI话题的时刻T1(时间戳获得) 计算激光雷达话题的时刻T2,并将T2加上设定的偏差时间间隔input_offset_m
【基于Ubuntu20.04的Autoware.universe安装过程】方案一:虚拟机 | 详细记录 | Vmware | 全过程图文 by.Akaxi
目录 一、Autoware.universe背景 二、虚拟机配置 三、Ubuntu20.04安装 四、GPU显卡安装 五、ROS2-Galactic安装 六、ROS2-dev-tools安装 七、rmw-implementation安装 八、pacmod安装 九、autoware-core安装 十、autoware universe dependencies安装 十一、安装p

Autoware 关键模块解读
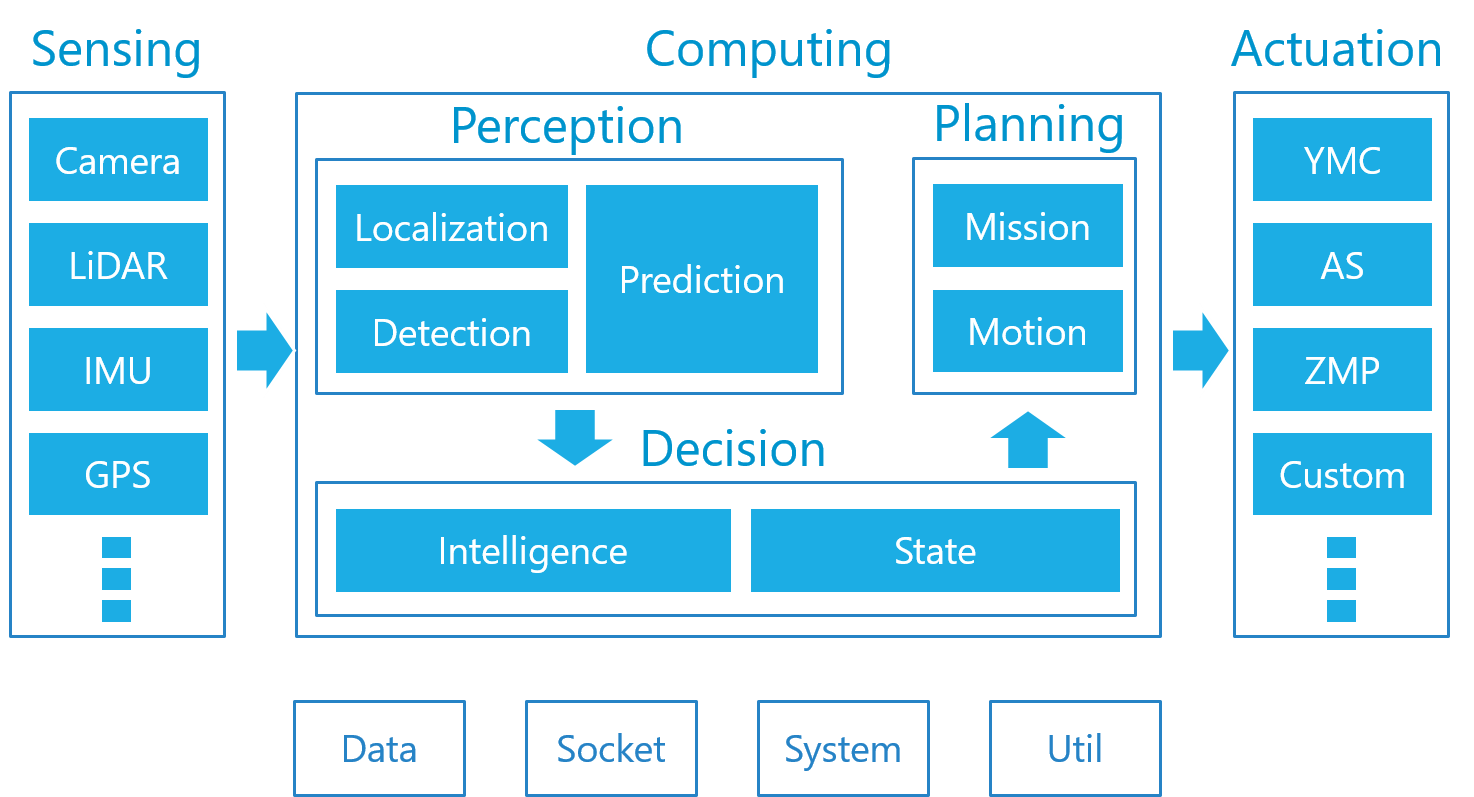
引言 本文参考Autoware_wiki_overview,主要描述了Autoware的整体框架和模块描述,主要包括感知和规划两大部分。 感知包括定位模块,检测模块,预测模块。定位模块使用3D map和SLAM算法来实现,辅助以GNSS和IMU传感器。检测模块使用摄像头和激光雷达,结合传感器融合算法和深度学习网络进行目标检测。预测模块使用定位和检测的结果来预测跟踪目标。 规划模块主要是基
【使用autoware中的标定工具包进行相机和激光雷达联合标定】
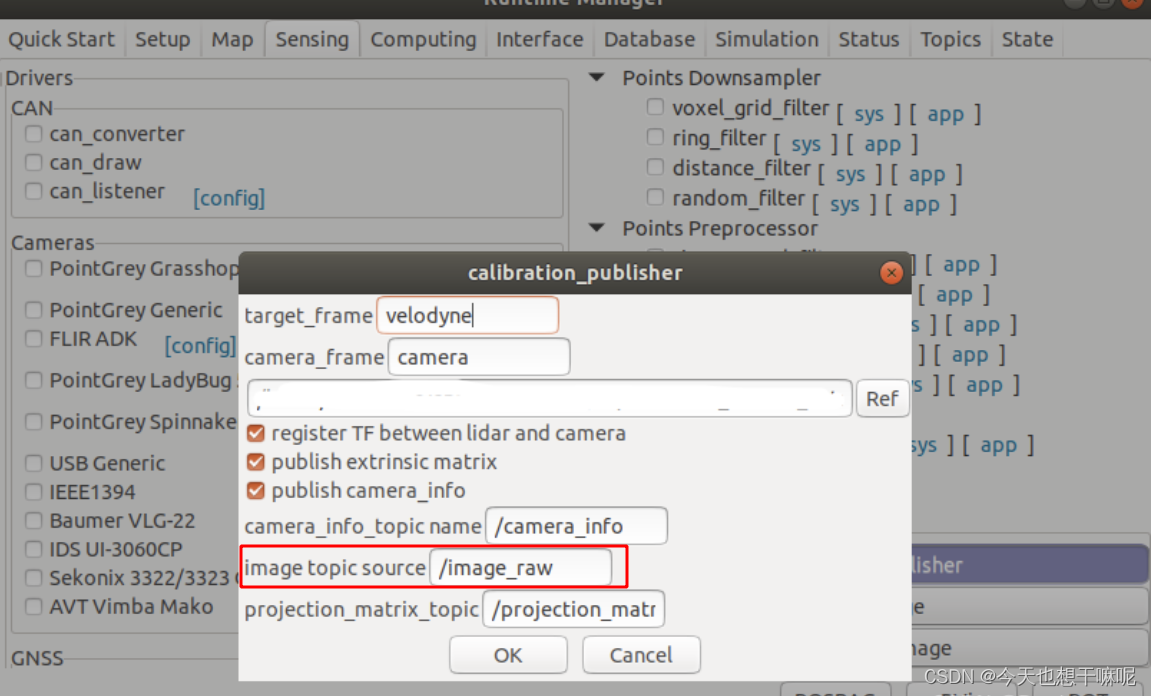
使用autoware中的标定工具包进行相机和激光雷达联合标定 一、工具安装1.catkin_make(Could not find the required component 'jsk_recognition_msgs'. )2. catkin_make(undefined reference to `cv::Mat::Mat()')3. rosrun calibration_camera
【学习笔记】手把手教你使用Autoware标定SICK-2D激光雷达和相机
2019/06/21更新说明:很多小伙伴反应从github上下载的Autoware没有Calibration Toolkit,是作者在github 的新源码和我用的版本不一样了。该教程仅针对2018年11月7日的发布版本。 网上Autoware的教程不多,而且都是关于多线的威力登雷达和相机的联合标定。自己摸索使用Autoware标定SICK TIM561单线激光雷达和相机的方法,写一个详细的
autoware 中的path following
今天早上一直在跑路径规划的程序,不过当时没弄好,阴错阳差却弄好了路径跟随的问题。 记录一下今天早上跑的步骤: 1 点击Ref ,加载bag文件,但是不play 2 RViz加载autoware中的default.rviz文件, 3 map 选择 point map 和vector map 进行加载,还有tf文件,点击play,pause 4 computing 选择 vel_p
ubuntu环境下autoware环境配置,与quickstart
autoware对环境的要求特别高,RAM 32g,ROM 30G,个人电脑的话就尽量别做了,转到工作站或者服务器来进行工作,不然在make时内存不够会出现死机或者C++内存错误,我当时的情况是死机,然后重启后,./run,可以通过,不过在后面就会出问题,map文件加载不进去,还会出现一些其他的问题。 这是软硬件配置要求: ROS indigo (Ubuntu 14.04)
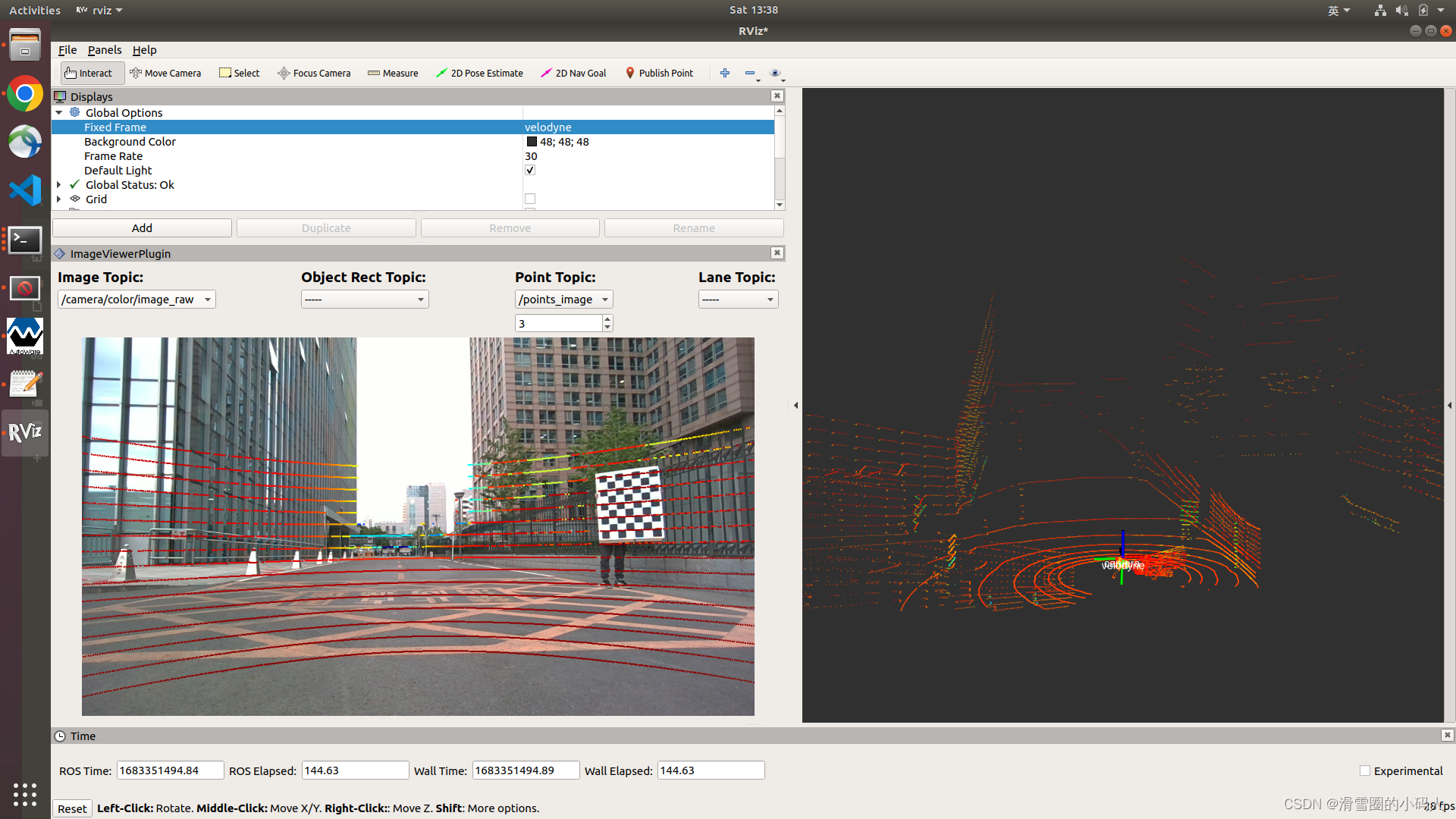
Autoware实现相机和激光雷达联合标定
1.功能包安装 1-编译 mkdir -p ~/CL_calibration_ws/srccd ~/CL_calibration_ws/srcgit clone https://github.com/XidianLemon/calibration_camera_lidar.gitcatkin_make 2-修改代码 打开CMakeLIsts.txt 将三处该行if ("${ROS_V
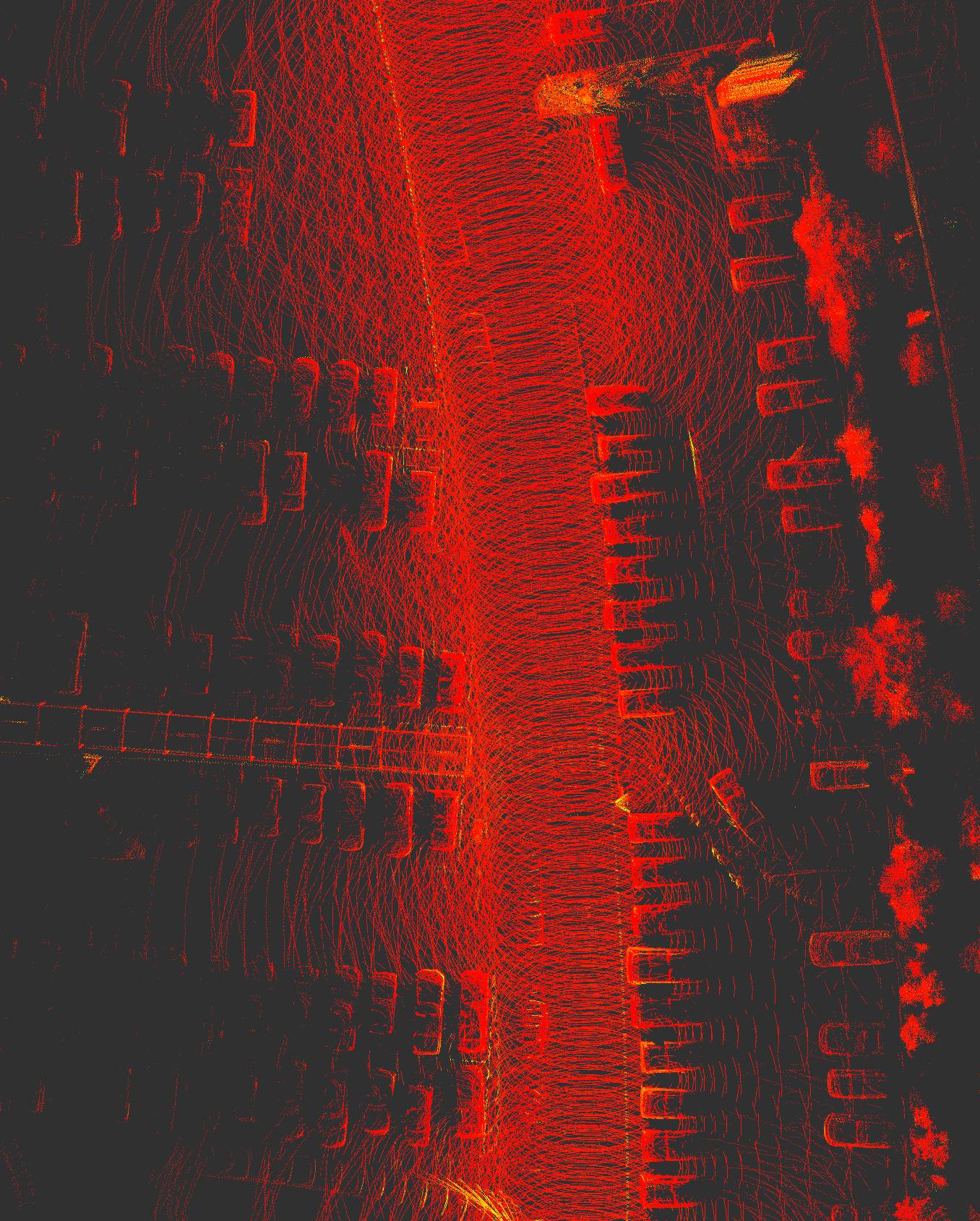
Autoware:测试
根据之前介绍的autoware手册进行三维地图的生成测试 地图生成是从激光雷达扫描的数据进行构建的,我们看几个雷达数据的bag文件: 0: /velodyne_packets 41 msgs : velodyne_msgs/VelodyneScan VelodyneScan是雷达扫描的原始数据格式 1 types: nmea_msgs/Sentence [9f221efc5f4b3ba

Autoware结构概览
目录 1.传感器 SensingCameraLiDARRADARIMUGPS/GNSS 2.计算 Computing2.1 感知 Perception1)定位 Localization2)检测 Detection3)预测 Prediction 2.2 决策 Decision1)Intelligence2)State 2.3 计划 Planning1)Mission2)Motion 3.执行
一 . autoware主体框架概述
autoware主体框架 整体框架 Sensor(传感器) Camera PointGrey (FLIR) Grasshopper 3 (USB/GigE)PointGrey (FLIR) Flea 2/3 (USB/GigE)PointGrey (FLIR) Blackfly (USB3/GigE)Baumer VLG-22C (USB3/GigE)Baumer VCXU-24

autoware概述以及主要框架各个模块的介绍
一、autoware主体框架 autoware主要包括sensing、computing(perception、decision、planning)、actuation等几个部分,如下图所示。 其中sensing模块对应的是各类传感器对真实世界中各类数据的采样,例如camera采样图像、LiDAR采样激光点云等,采样数据属于未处理的原始数据,需要输入到computing模块进行计算处理c
autoware.ai中检测模块lidar_detector caffe
lidar_apollo_cnn_seg_detect模块:该模块主要是调用百度apollo的目标分割。 1.需要安装caffe进行实现: caffe安装步骤: git clone https://github.com/BVLC/caffe cd caffe && mdkir build && cd build cmake .. 出现报错: CMake Error at cmake


ros2移植Apollo和autoware规控算法可跑工程
工程详细介绍请看: 自动驾驶路径规划控制ros移植Apollo和autoware规控算法可跑工程(适合入门学习,科研和实战) ros2的工程版本说明 之所以增加ros2版本,是因为想增加代码的工程应用性,其实对于科研来说并非必需。 ros2版本 我这里用的ubuntu18.04的eloquent的版本,大家安装其他版本的ros2时,可能需要修改代码的.launch.py文件的参数,比如no