本文主要是介绍Autoware:测试,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
根据之前介绍的autoware手册进行三维地图的生成测试
地图生成是从激光雷达扫描的数据进行构建的,我们看几个雷达数据的bag文件:
0:
/velodyne_packets 41 msgs : velodyne_msgs/VelodyneScan
VelodyneScan是雷达扫描的原始数据格式
1
types: nmea_msgs/Sentence [9f221efc5f4b3bac7ce4af102b32308b]
sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
topics: /nmea_sentence 11980 msgs : nmea_msgs/Sentence
/points_raw 4788 msgs : sensor_msgs/PointCloud2
PointCloud2雷达点云数据,从原始数据转换生成的
2
/velodyne_packets 135 msgs : velodyne_msgs/VelodyneScan
/velodyne_points 134 msgs : sensor_msgs/PointCloud2
根据文档从PointCloud2就可以支持跑相关功能模块生成三维地图如下效果:
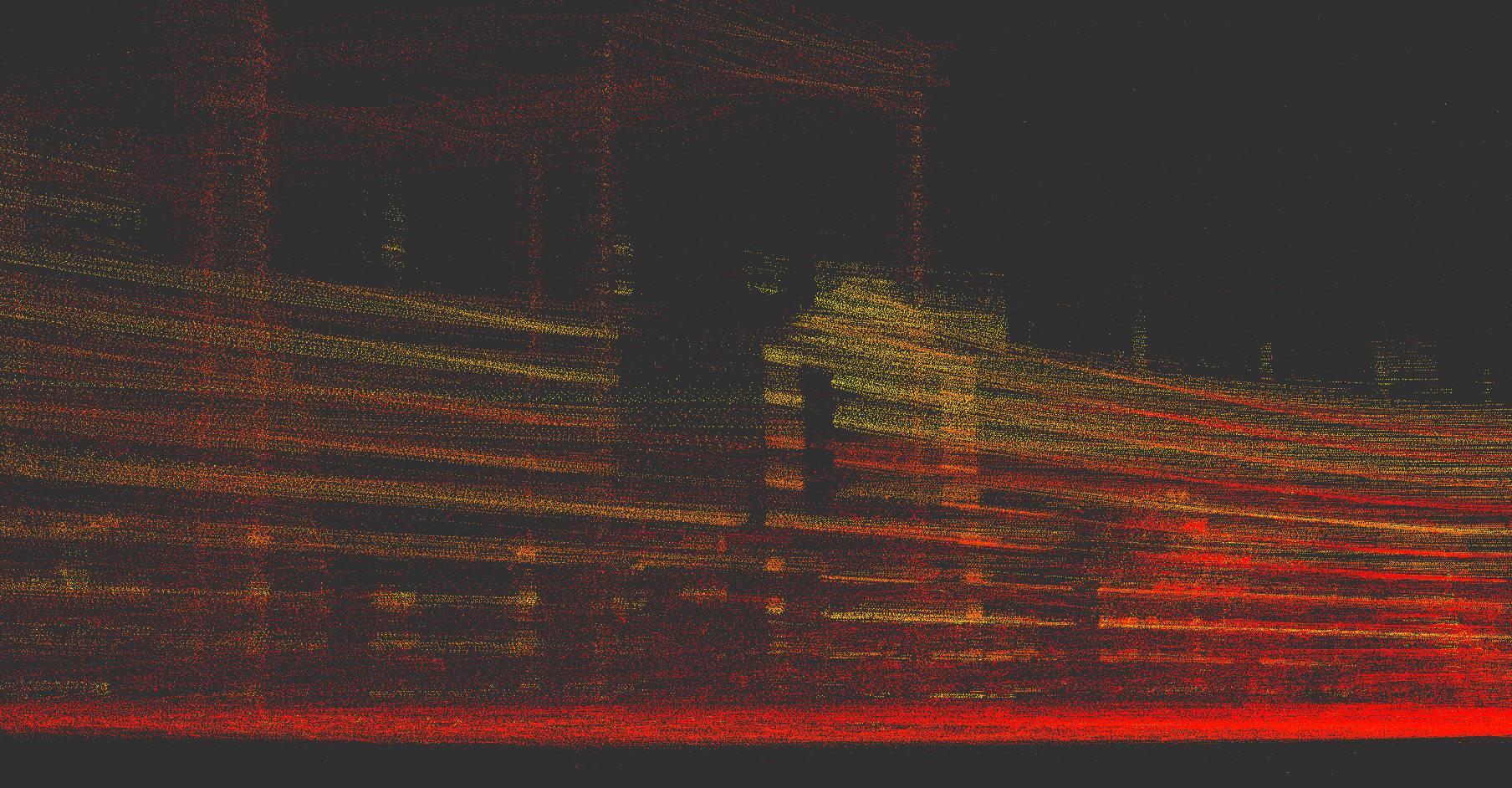
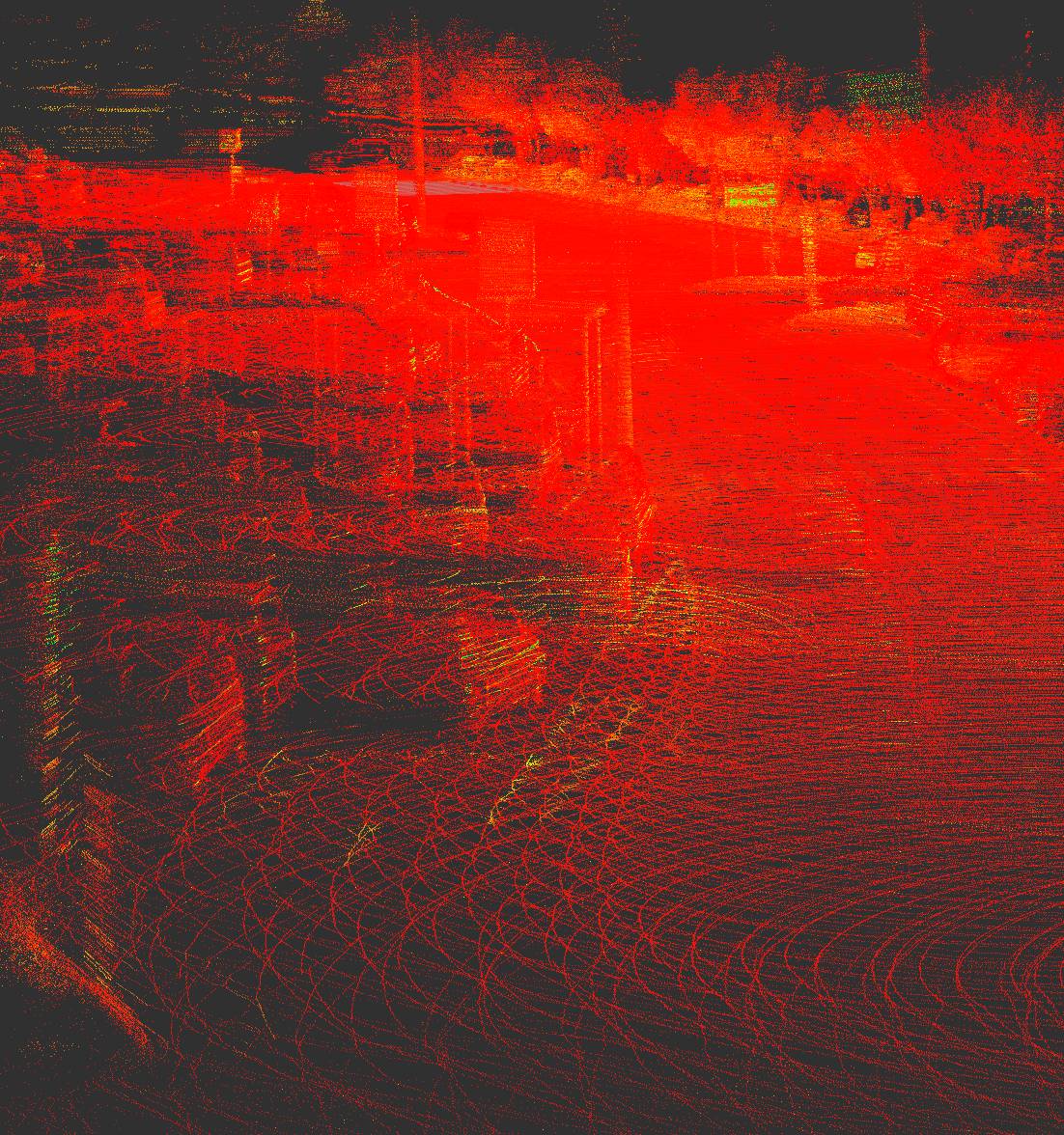
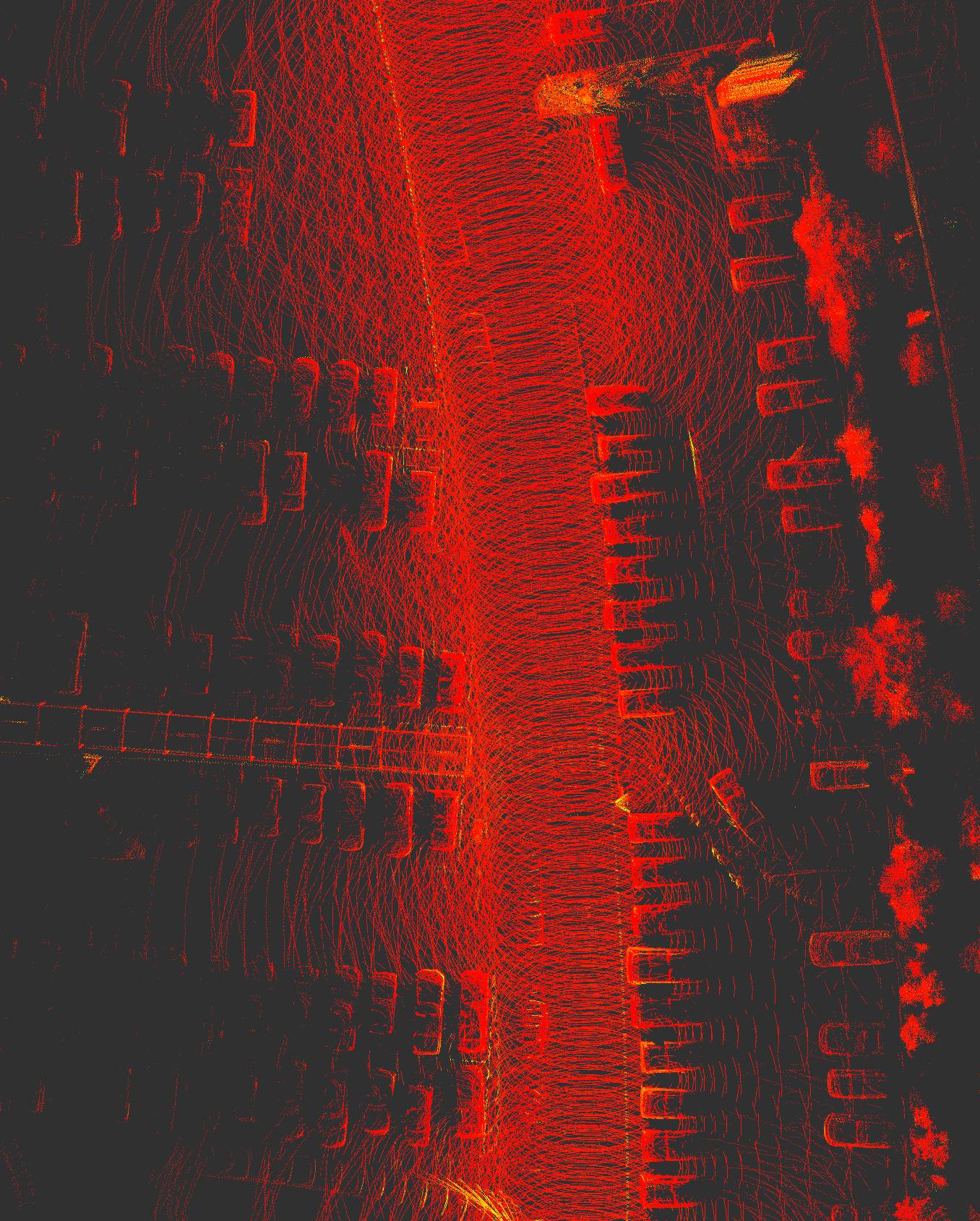
手册内容参考上面链接
大家可以尝试从很多开放数据上面测试看看。比如
这篇关于Autoware:测试的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





![业务中14个需要进行A/B测试的时刻[信息图]](https://img-blog.csdnimg.cn/img_convert/aeacc959fb75322bef30fd1a9e2e80b0.jpeg)


