本文主要是介绍差速机器人模型LQR 控制仿真(c++ opencv显示),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 差速机器人状态方程构建
1.1差速机器人运动学模型
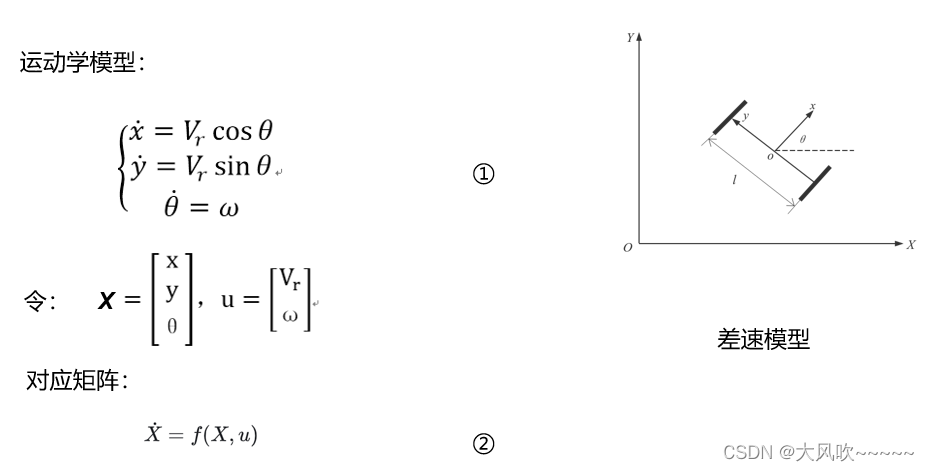
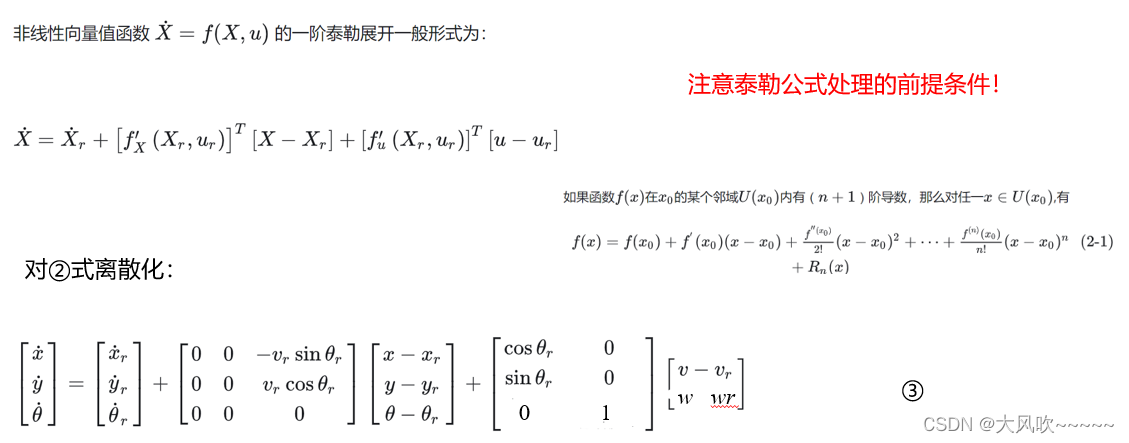
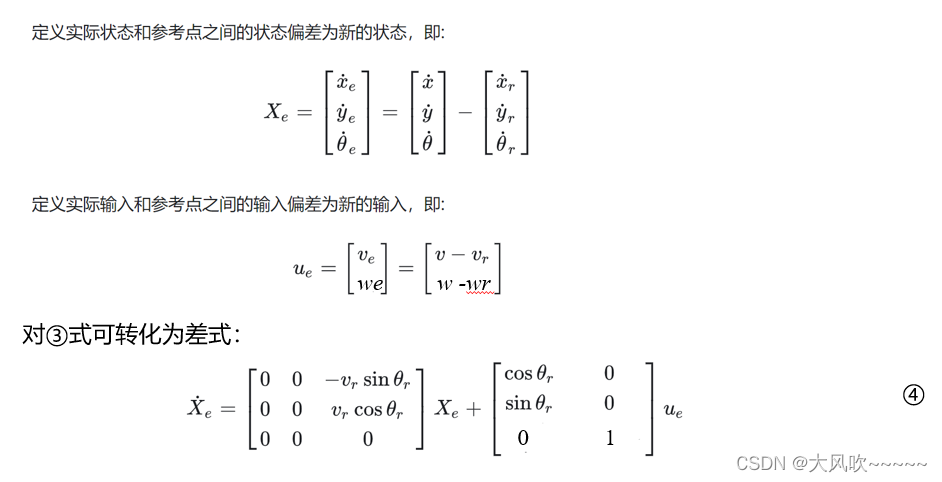
1.2模型线性化
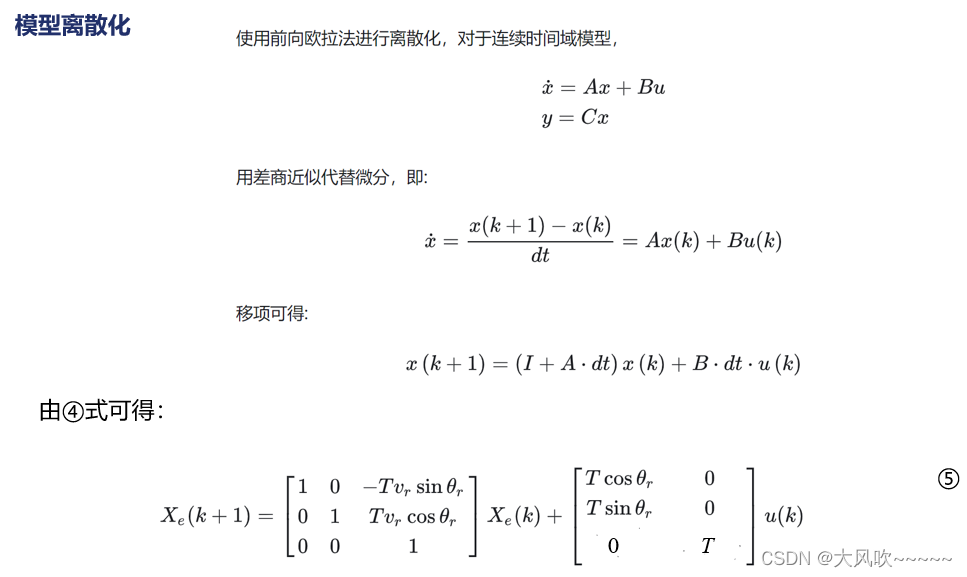
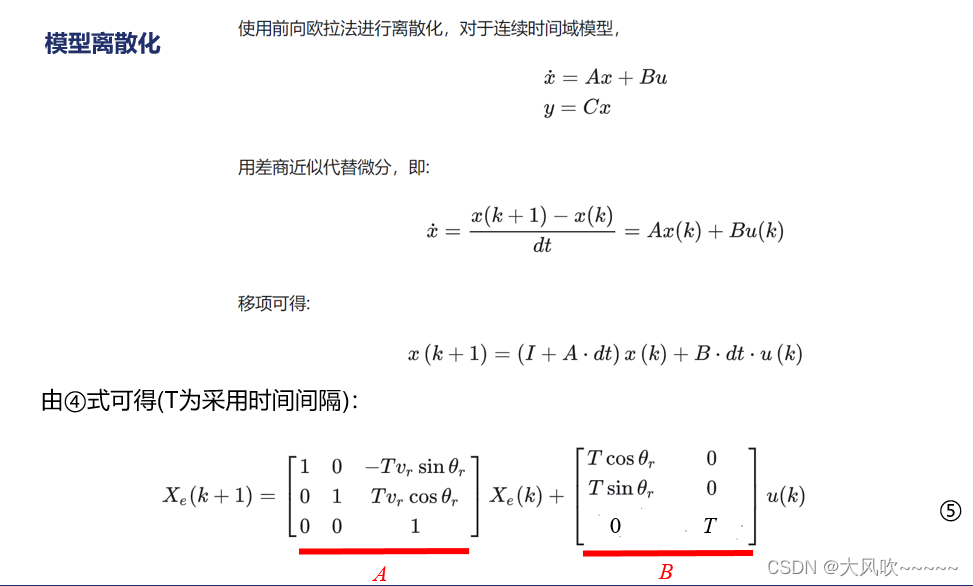
1.3模型离散化
2离散LQR迭代计算
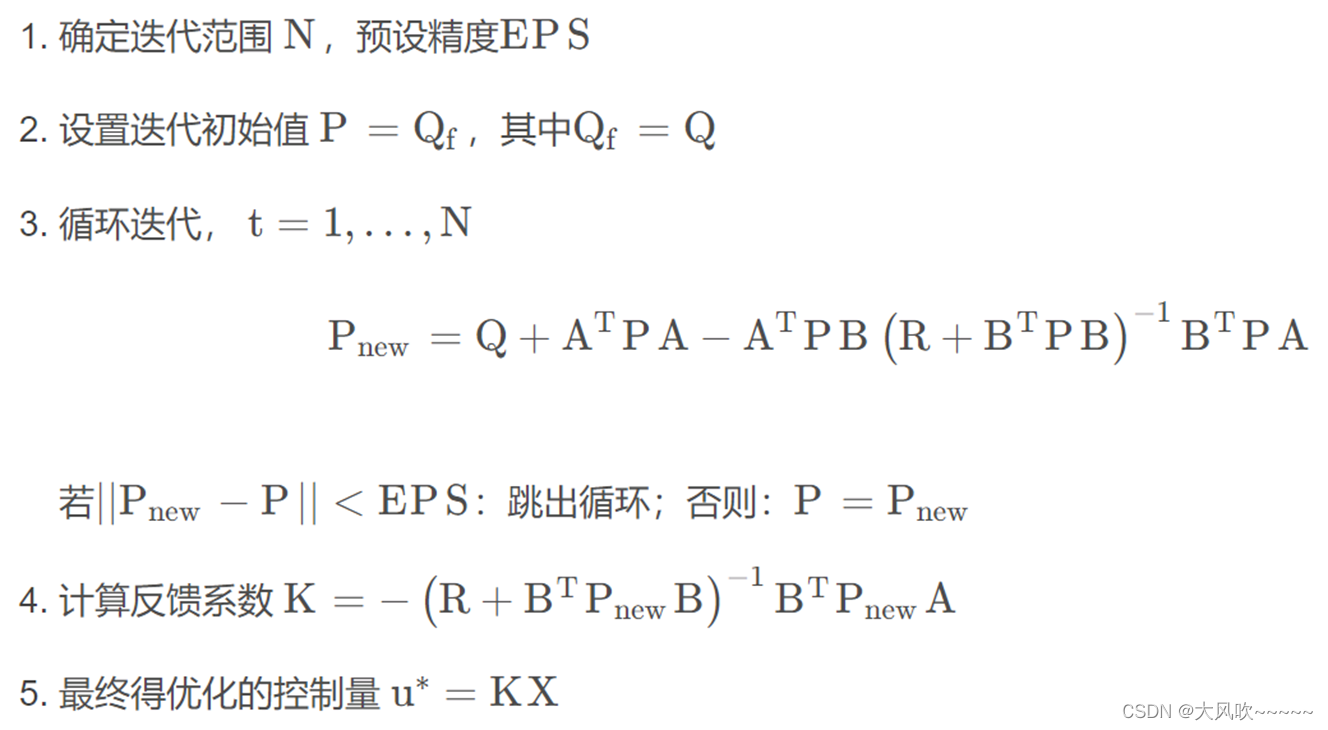
注意1:P值的初值为Q。见链接中的:

注意2:Q, R参数调节

注意3:LQR一般只做横向控制,不做纵向控制。LQR输出的速度为速度差,需要进一步转换
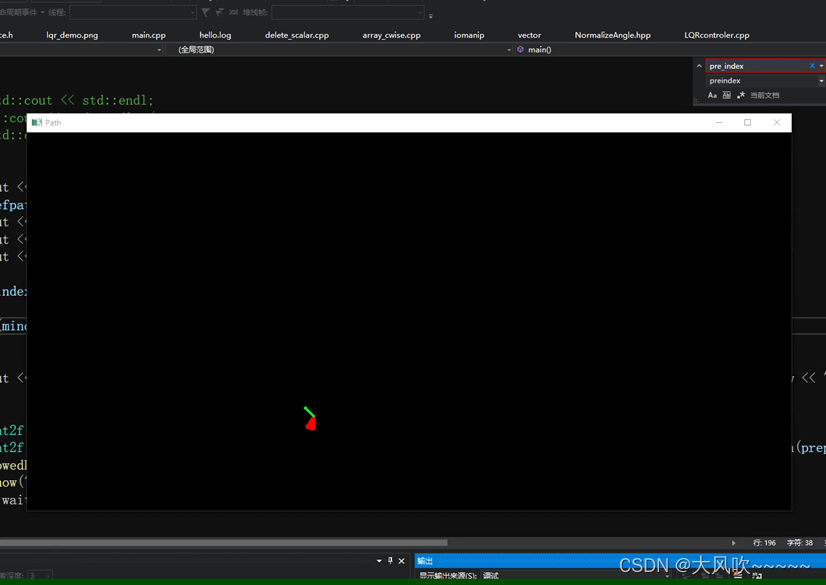
3点镇定路径跟踪
通过调整参考路径,实现分段LQR路径跟踪:
①先旋转;
②直线跟踪到目标点;
③再旋转至目标点的姿态;
④再进行目标跟踪。
4代码
https://gitee.com/Luweizhiyuan2020/lqr1.git
注意下载a bit calm这个commit。
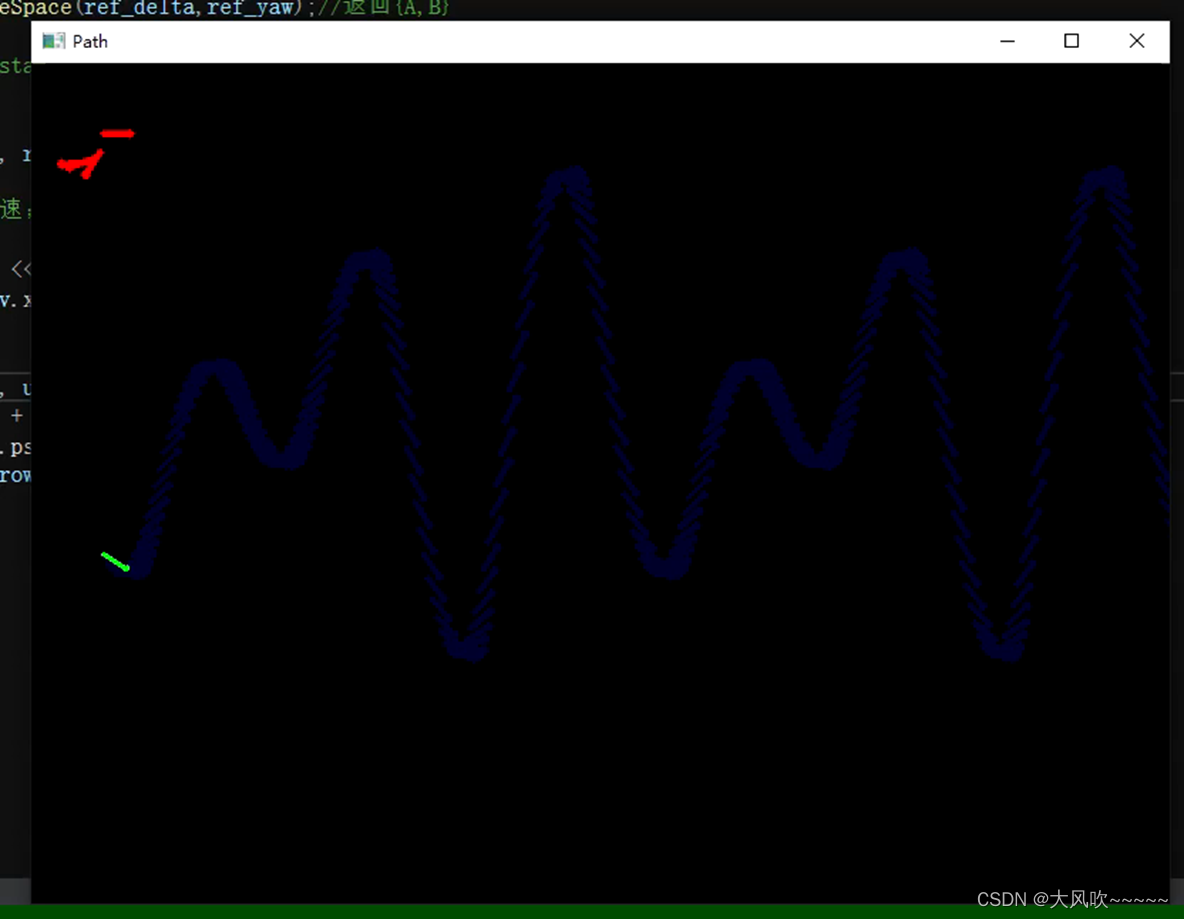
5仿真
路径跟踪
点镇定
这篇关于差速机器人模型LQR 控制仿真(c++ opencv显示)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






