差速专题
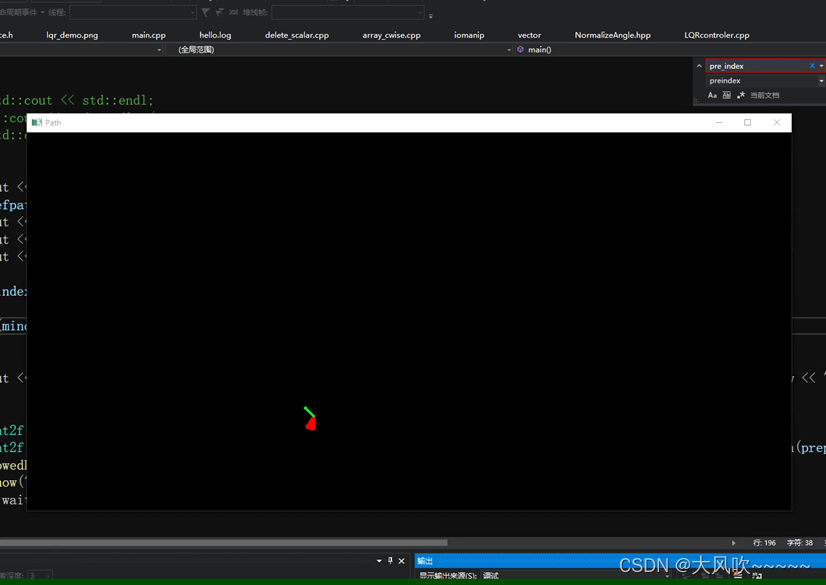
差速机器人模型LQR 控制仿真(c++ opencv显示)
1 差速机器人状态方程构建 1.1差速机器人运动学模型 1.2模型线性化 1.3模型离散化 2离散LQR迭代计算 注意1:P值的初值为Q。见链接中的: 注意2:Q, R参数调节 注意3:LQR一般只做横向控制,不做纵向控制。LQR输出的速度为速度差,需要进一步转换 3点镇定路径跟踪 通过调整参考路径,实现分段LQR路径跟踪: ①先旋转; ②直线跟踪到目标点; ③

ros小问题之差速轮式机器人轮子不显示(rviz gazebo)
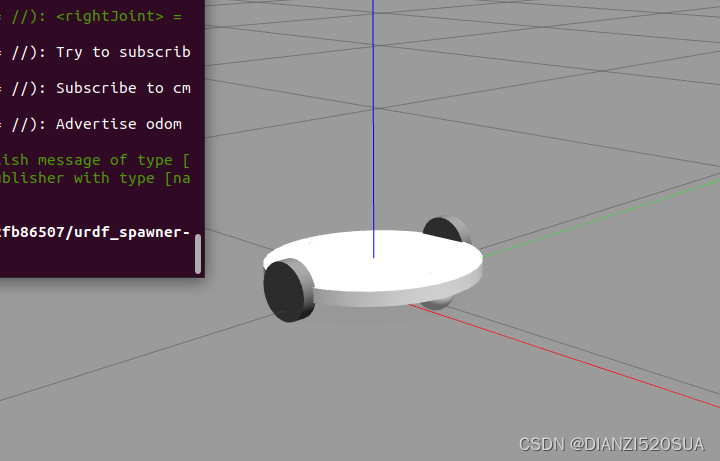
在rviz及gazebo练习差速轮式机器人时,很奇怪,只有个机器人的底板及底部的两个万向轮,如下图, 后来查看相关.xacro文件,里面是引用包含了轮子的xacro文件,只需传入不同的参数即可调用生成不同位置的轮子,精简了代码。找到定义轮子的xacro文件,在惯性那行增加xacro:即可,如下图所示,否则会找不到相关的值替换,自然不显示。 最终效果如下。 其他部件
机器人控制算法——两轮差速驱动运动模型
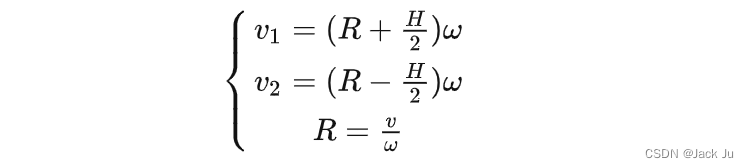
1.Introduction 本文主要介绍针对于两轮差速模型的逆运动学数学推导。因为在机器人控制领域,决策规划控制层给执行器输出的控制指令v(车辆前进速度)和w(角速度),因此,我们比较关心,当底层两个驱动电机接收到此信息,如何将v和w转换成左轮速度V1和右轮速度V2。 2.Algorithm 如上图,是两轮差速模型,我们考虑左轮V1!= V2,的情况。 当机器人绕远处O_mation圆心,做圆
机器人控制算法——两轮差速驱动运动模型
1.Introduction 本文主要介绍针对于两轮差速模型的逆运动学数学推导。因为在机器人控制领域,决策规划控制层给执行器输出的控制指令v(车辆前进速度)和w(角速度),因此,我们比较关心,当底层两个驱动电机接收到此信息,如何将v和w转换成左轮速度V1和右轮速度V2。 2.Algorithm 如上图,是两轮差速模型,我们考虑左轮V1!= V2,的情况。 当机器人绕远处O_mation圆心,做圆