相关文章

基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(五):Blender锥桶建模
前言 本系列教程旨在使用UE5配置一个具备激光雷达+深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博客Nav2代价地图实现和原理–Nav2源码解读之CostMap2D(上)-CSDN博客往期教程: 第一期:基于UE5和ROS2的激光雷达+深度RG

基于 YOLOv5 的积水检测系统:打造高效智能的智慧城市应用
在城市发展中,积水问题日益严重,特别是在大雨过后,积水往往会影响交通甚至威胁人们的安全。通过现代计算机视觉技术,我们能够智能化地检测和识别积水区域,减少潜在危险。本文将介绍如何使用 YOLOv5 和 PyQt5 搭建一个积水检测系统,结合深度学习和直观的图形界面,为用户提供高效的解决方案。 源码地址: PyQt5+YoloV5 实现积水检测系统 预览: 项目背景
![[yolov5] --- yolov5入门实战「土堆视频」](https://i-blog.csdnimg.cn/direct/8e01ba7709e34acc929cfe32af9e4c41.png)
[yolov5] --- yolov5入门实战「土堆视频」
1 项目介绍及环境配置 下载yolov5 tags 5.0源码,https://github.com/ultralytics/yolov5/tree/v5.0,解压 Pycharm 中创建conda虚拟环境 激活conda虚拟环境 根据作者提供的requirements.txt文件,pip install -r requirements.txt 如果作者没有提供requirement.txt文件

基于微信小程序与嵌入式系统的智能小车开发(详细流程)
一、项目概述 本项目旨在开发一款智能小车,结合微信小程序与嵌入式系统,提供实时图像处理与控制功能。用户可以通过微信小程序远程操控小车,并实时接收摄像头采集的图像。该项目解决了传统遥控小车在图像反馈和控制延迟方面的问题,提升了小车的智能化水平,适用于教育、科研和娱乐等多个领域。 二、系统架构 1. 系统架构设计 本项目的系统架构主要分为以下几个部分: 微信小程序:负责用户界面、控制指令的

数据集 3DPW-开源户外三维人体建模-姿态估计-人体关键点-人体mesh建模 >> DataBall
3DPW 3DPW-开源户外三维人体建模数据集-姿态估计-人体关键点-人体mesh建模 开源户外三维人体数据集 @inproceedings{vonMarcard2018, title = {Recovering Accurate 3D Human Pose in The Wild Using IMUs and a Moving Camera}, author = {von Marc

数据集 Ubody人体smplx三维建模mesh-姿态估计 >> DataBall
Ubody开源人体三维源数据集-smplx-三维建模-姿态估计 UBody:一个连接全身网格恢复和真实生活场景的上半身数据集,旨在拟合全身网格恢复任务与现实场景之间的差距。 UBody包含来自多人的现实场景的1051k张高质量图像,这些图像拥有2D全身关键点、3D SMPLX模型。 UBody由国际数字经济学院(IDEA)提供。 (UBody was used for mesh r
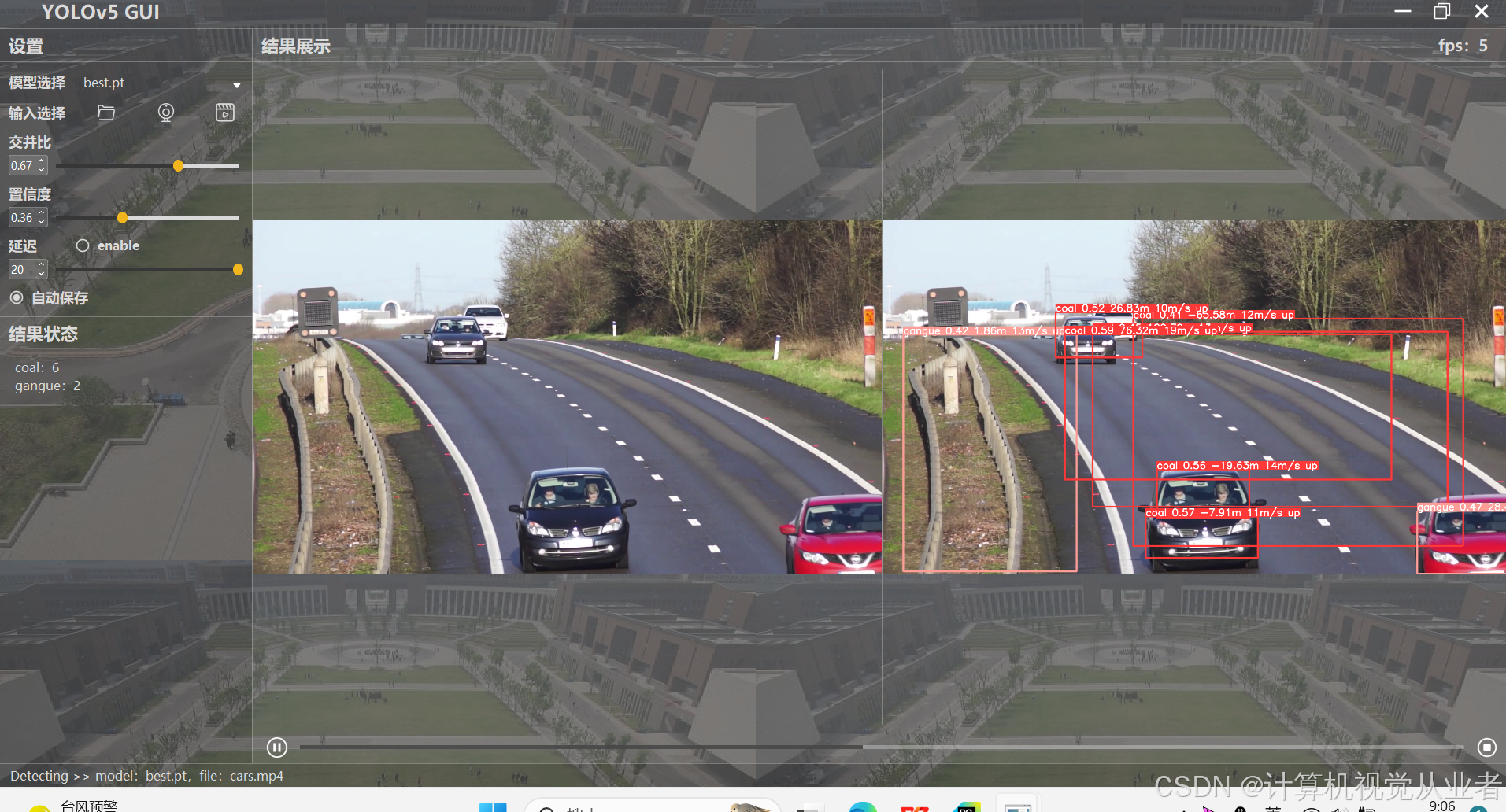
yolov5 +gui界面+单目测距 实现对图片视频摄像头的测距
可实现对图片,视频,摄像头的检测 项目概述 本项目旨在实现一个集成了YOLOv5目标检测算法、图形用户界面(GUI)以及单目测距功能的系统。该系统能够对图片、视频或实时摄像头输入进行目标检测,并估算目标的距离。通过结合YOLOv5的强大检测能力和单目测距技术,系统能够在多种应用场景中提供高效、准确的目标检测和测距功能。 技术栈 YOLOv5:用于目标检测的深度学习模型。Open

Android 自定义View控件,实现跟随手指触摸移动的小球
Android UI组件是通过继承View类,然后绘制内容,比如ImageView,TextView等组件都是继承View类。 当Android系统提供的组件功能不能满足需求时,可以通过继承View类重写一个或多个方法,派生自定义的组件,View类常用重写方法: 1.构造器:View子类最基本的重写方法 protected voidonDraw(Canvas canvas) public

基于51单片机的智能小车转向控制系统设计与实现
文章目录 前言资料获取设计介绍功能介绍具体实现截图参考文献设计获取 前言 💗博主介绍:✌全网粉丝10W+,CSDN特邀作者、博客专家、CSDN新星计划导师,一名热衷于单片机技术探索与分享的博主、专注于 精通51/STM32/MSP430/AVR等单片机设计 主要对象是咱们电子相关专业的大学生,希望您们都共创辉煌!✌💗 👇🏻 精彩专栏 推荐订阅👇🏻 单片机设计精品