本文主要是介绍【连续介质力学】涉及积分的定理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
涉及积分的定理
分部积分
分部积分:
∫ a b u ( x ) v ′ ( x ) d x = u ( x ) v ( x ) ∣ a b − ∫ a b v ( x ) u ′ ( x ) d x \int_a^bu(x)v'(x)dx=u(x)v(x)|_a^b-\int_a^bv(x)u'(x)dx ∫abu(x)v′(x)dx=u(x)v(x)∣ab−∫abv(x)u′(x)dx
其中, v ′ ( x ) = d v d x v'(x) = \frac{dv}{dx} v′(x)=dxdv
散度定理
给定一个体积为V的域B,边界为S,那么应用在向量场的散度定理(也叫Green’s Theorem, 格林定理)为:
∫ V ∇ x ⃗ ⋅ v ⃗ d V = ∫ S v ⃗ ⋅ n ^ d S = ∫ S v ⃗ ⋅ d S ⃗ ∫ V v i , i d V = ∫ S v i n ^ i d S = ∫ S v i d S i \int_V \nabla_{\vec x}\cdot \vec vd V = \int_S \vec v\cdot \hat ndS = \int _S \vec v\cdot d\vec S \\ \int_V v_{i,i}dV=\int_Sv_i\hat n_idS=\int_Sv_idS_i ∫V∇x⋅vdV=∫Sv⋅n^dS=∫Sv⋅dS∫Vvi,idV=∫Svin^idS=∫SvidSi
其中, n ^ \hat n n^ 是向外垂直于表面S的
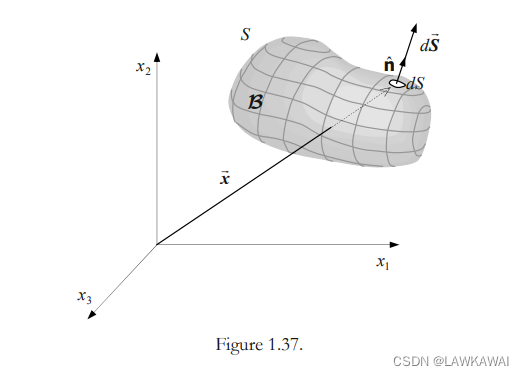
令T是在域B的二阶张量场,那么应用散度定理在这个场:
∫ V ∇ x ⃗ ⋅ T d V = ∫ S T ⋅ n ^ d S = ∫ S T ⋅ d S ⃗ ∫ V T i j , j d V = ∫ S T i j n ^ j d S = ∫ S T i j d S j \int_V \nabla_{\vec x}\cdot Td V = \int_S T\cdot \hat ndS = \int _S T\cdot d\vec S \\ \int_V T_{ij,j}dV=\int_ST_{ij}\hat n_jdS=\int_ST_{ij}dS_j ∫V∇x⋅TdV=∫ST⋅n^dS=∫ST⋅dS∫VTij,jdV=∫STijn^jdS=∫STijdSj
通过利用散度定理,也可以证明:
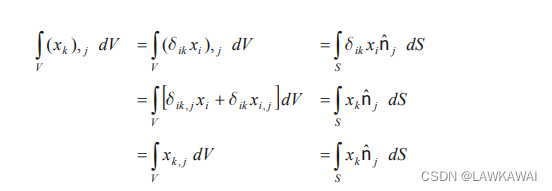
其中,假设 δ i k , j = 0 i k j \delta_{ik,j}=0_{ikj} δik,j=0ikj,另外,因为 x k , j = δ k j x_{k,j}=\delta_{kj} xk,j=δkj,得到:
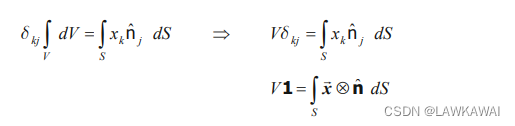
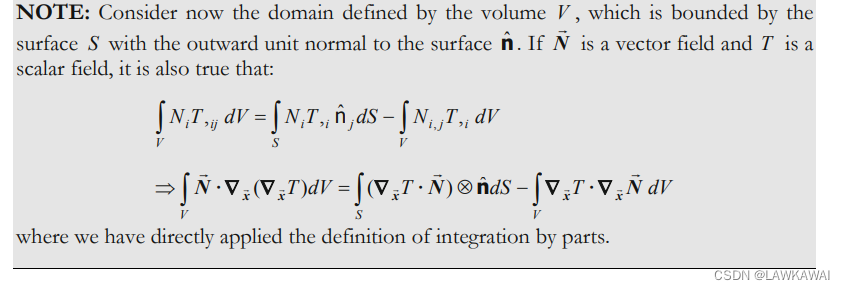
给定一个定义在域B的二阶张量,以下成立:
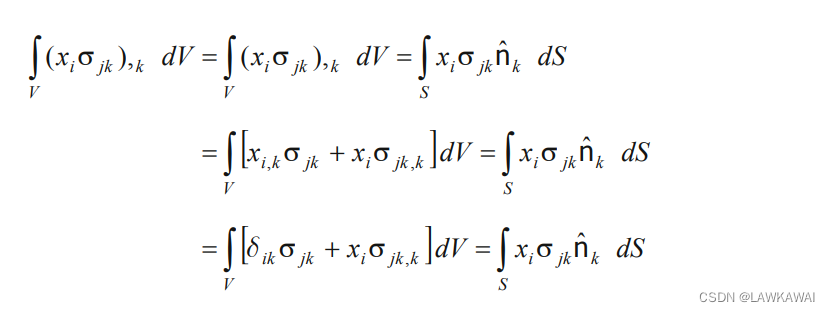
因此,可以证明:
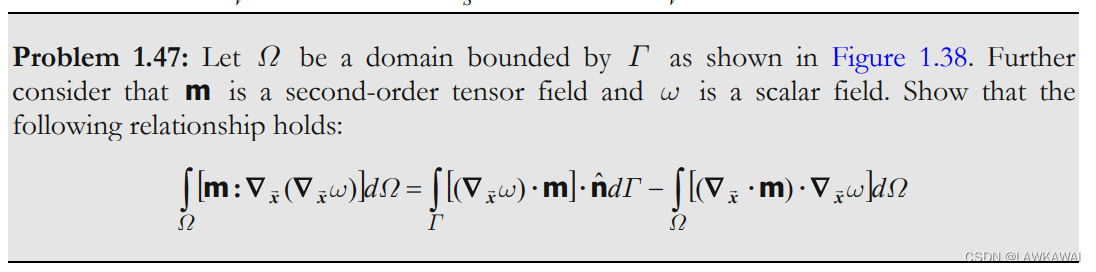
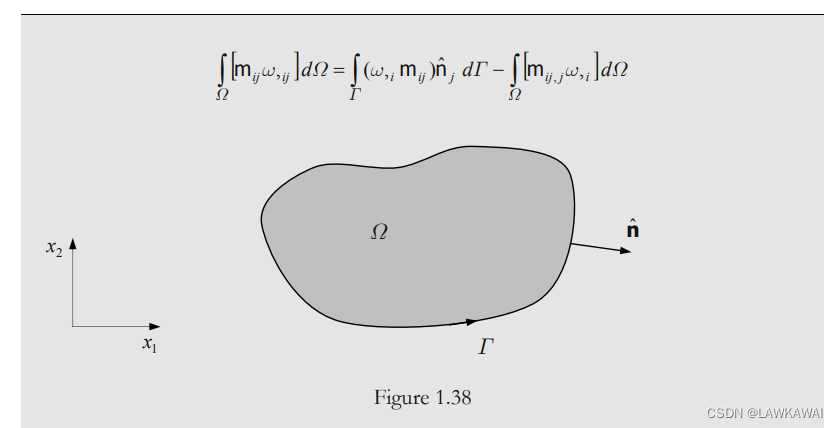
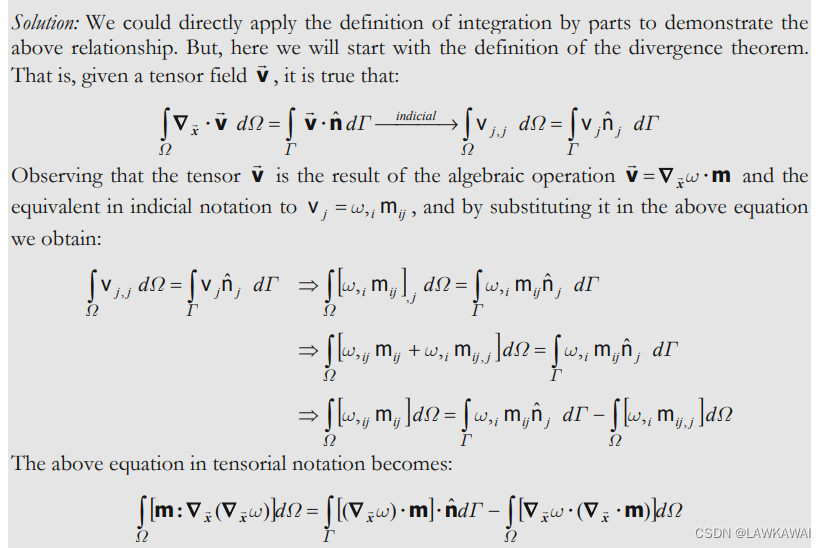
问题1.47 令 Ω \Omega Ω 是一个边界为 Γ \Gamma Γ的域,m是一个二阶张量场, ω \omega ω是一个标量场,证明:
路径的独立性
连接两个点A和B的曲线称为从A到B的路径
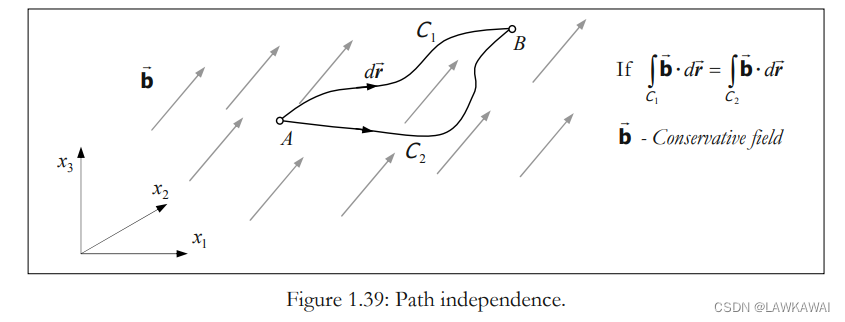
建立线积分与路径无关的条件:
令 b ⃗ ( x ⃗ ) \vec b(\vec x) b(x)是一个连续的向量场,那么积分 ∫ C b ⃗ ⋅ d r ⃗ \int_{C}\vec b\cdot d\vec r ∫Cb⋅dr与路径无关,当且仅当 b ⃗ \vec b b是保守场,这意味着存在一个标量场 ϕ \phi ϕ使得 b ⃗ = ∇ x ⃗ ϕ \vec b = \nabla_{\vec x} \phi b=∇xϕ,也就是向量场是某个标量场的梯度:
∫ A B b ⃗ ⋅ d r ⃗ = ∫ A B ∇ x ⃗ ϕ ⋅ d r ⃗ ∫ A B ( b 1 e ^ 1 + b 2 e ^ 2 + b 3 e ^ 3 ) ⋅ d r ⃗ = ∫ A B ( ∂ ϕ ∂ x 1 e ^ 1 + ∂ ϕ ∂ x 2 e ^ 2 + ∂ ϕ ∂ x 3 e ^ 3 ) ⋅ d r ⃗ \int_A^B\vec b\cdot d\vec r=\int_A^B\nabla_{\vec x}\phi \cdot d\vec r \\ \int_A^B(b_1\hat e_1+b_2\hat e_2+b_3\hat e_3)\cdot d\vec r=\int_A^B(\frac{\partial \phi}{\partial x_1}\hat e_1+\frac{\partial \phi}{\partial x_2}\hat e_2+\frac{\partial \phi}{\partial x_3}\hat e_3)\cdot d\vec r ∫ABb⋅dr=∫AB∇xϕ⋅dr∫AB(b1e^1+b2e^2+b3e^3)⋅dr=∫AB(∂x1∂ϕe^1+∂x2∂ϕe^2+∂x3∂ϕe^3)⋅dr
因此:
b 1 = ∂ ϕ ∂ x 1 ; b 2 = ∂ ϕ ∂ x 2 ; b 3 = ∂ ϕ ∂ x 3 ; b_1 = \frac{\partial \phi}{\partial x_1}; \quad b_2 = \frac{\partial \phi}{\partial x_2}; \quad b_3 = \frac{\partial \phi}{\partial x_3}; b1=∂x1∂ϕ;b2=∂x2∂ϕ;b3=∂x3∂ϕ;
由于场是保守的,所以 b ⃗ \vec b b的旋度为0:
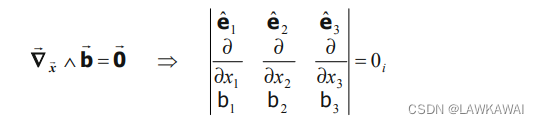
因此,得出结论:
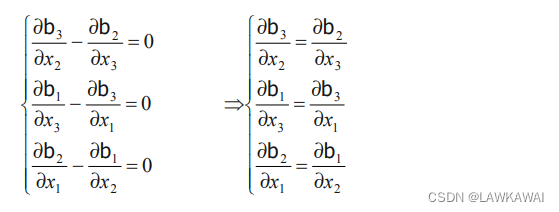
因此,如果以上条件不满足,则场不是保守的
Kelvin-Stokes定理
令S是一个曲面, F ⃗ ( x ⃗ , t ) \vec F(\vec x, t) F(x,t)是一个向量场,根据Kelvin-Stokes定理,有:
∮ Γ F ⃗ ⋅ d Γ ⃗ = ∫ Ω ( ∇ ⃗ x ⃗ ∧ F ⃗ ) ⋅ d S ⃗ = ∫ Ω ( ∇ ⃗ x ⃗ ∧ F ⃗ ) ⋅ n ^ d S \boxed{\oint_{\Gamma}\vec F \cdot d\vec \Gamma=\int_{\Omega}(\vec \nabla_{\vec x}\wedge \vec F)\cdot d\vec S=\int_{\Omega}(\vec \nabla_{\vec x}\wedge \vec F)\cdot \hat n dS} ∮ΓF⋅dΓ=∫Ω(∇x∧F)⋅dS=∫Ω(∇x∧F)⋅n^dS
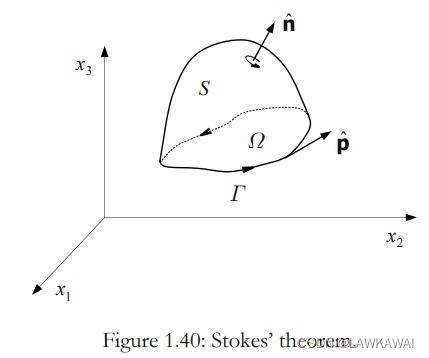
如果 p ^ \hat p p^表示切向于边界 Γ \Gamma Γ的单位向量,那么Stoke’s定理为:
∮ Γ F ⃗ ⋅ p ^ d Γ = ∫ Ω ( ∇ ⃗ x ⃗ ∧ F ⃗ ) ⋅ d S ⃗ = ∫ Ω ( ∇ ⃗ x ⃗ ∧ F ⃗ ) ⋅ n ^ d S \oint_{\Gamma}\vec F\cdot \hat pd \Gamma=\int_{\Omega}(\vec \nabla_{\vec x}\wedge \vec F)\cdot d\vec S=\int_{\Omega}(\vec \nabla_{\vec x}\wedge \vec F)\cdot \hat ndS ∮ΓF⋅p^dΓ=∫Ω(∇x∧F)⋅dS=∫Ω(∇x∧F)⋅n^dS
参考笛卡尔坐标系下的表示:
F ⃗ = F 1 e ^ 1 + F 2 e ^ 2 + F 3 e ^ 3 \vec F= F_1 \hat e_1+ F_2 \hat e_2+ F_3 \hat e_3 F=F1e^1+F2e^2+F3e^3
d S ⃗ = d S 1 e ^ 1 + d S 2 e ^ 2 + d S 3 e ^ 3 d\vec S = dS_1\hat e_1+dS_2\hat e_2+dS_3\hat e_3 dS=dS1e^1+dS2e^2+dS3e^3
d Γ ⃗ = d x 1 e ^ 1 + d x 2 e ^ 2 + d x 3 e ^ 3 d\vec \Gamma = dx_1\hat e_1+dx_2\hat e_2+dx_3\hat e_3 dΓ=dx1e^1+dx2e^2+dx3e^3
F ⃗ \vec F F的旋度的分量为:

那么,Stoke‘s定理表示成以上分量形式:
∮ Γ F 1 d x 1 + F 2 d x 2 + F 3 d x 3 = ∫ Ω ( ∂ F 3 ∂ x 2 − ∂ F 2 ∂ x 3 ) d S 1 + ( ∂ F 1 ∂ x 3 − ∂ F 3 ∂ x 1 ) d S 2 + ( ∂ F 2 ∂ x 1 − ∂ F 1 ∂ x 2 ) d S 3 \oint_{\Gamma}F_1dx_1+F_2dx_2+F_3dx_3 \\ =\int_{\Omega}(\frac{\partial F_3}{\partial x_2}-\frac{\partial F_2}{\partial x_3})dS_1+(\frac{\partial F_1}{\partial x_3}-\frac{\partial F_3}{\partial x_1})dS_2+(\frac{\partial F_2}{\partial x_1}-\frac{\partial F_1}{\partial x_2})dS_3 ∮ΓF1dx1+F2dx2+F3dx3=∫Ω(∂x2∂F3−∂x3∂F2)dS1+(∂x3∂F1−∂x1∂F3)dS2+(∂x1∂F2−∂x2∂F1)dS3
特殊情况:曲面S是就是平面 Ω \Omega Ω,上式仍然成立
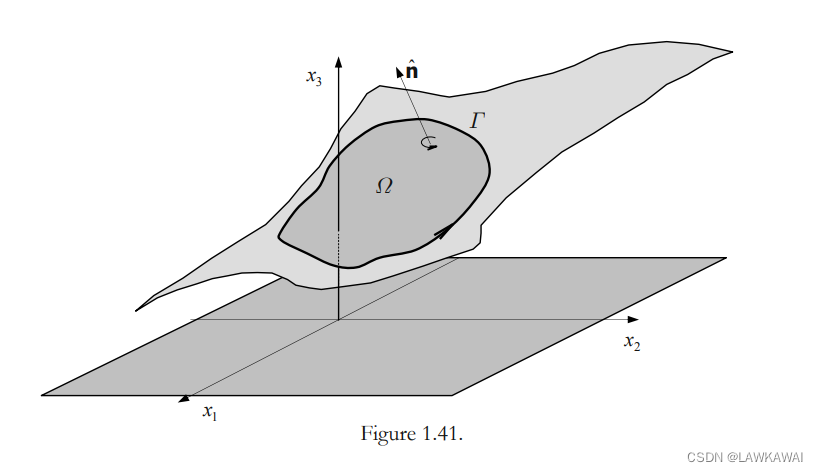
如果 Ω \Omega Ω是 x 1 − x 2 x_1-x_2 x1−x2平面,那么上式变为:
∮ Γ F ⃗ ⋅ d Γ = ∫ Ω ( ∇ ⃗ x ⃗ ∧ F ⃗ ) ⋅ e ^ 3 d S \oint_{\Gamma}\vec F \cdot d \Gamma=\int_{\Omega}(\vec \nabla_{\vec x}\wedge \vec F)\cdot \hat e_3 dS ∮ΓF⋅dΓ=∫Ω(∇x∧F)⋅e^3dS
这就是大家都知道的平面上的Stoke’s定理,即格林公式。
张量分量:
∮ Γ F 1 d x 1 + F 2 d x 2 = ∫ Ω ( ∂ F 2 ∂ x 1 − ∂ F 1 ∂ x 2 ) d S 3 \oint_{\Gamma}F_1dx_1+F_2dx_2=\int_{\Omega}(\frac{\partial F_2}{\partial x_1}-\frac{\partial F_1}{\partial x_2}) dS_3 ∮ΓF1dx1+F2dx2=∫Ω(∂x1∂F2−∂x2∂F1)dS3
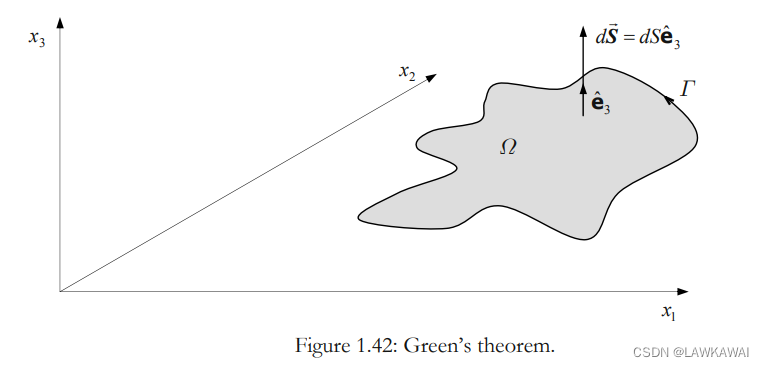
格林公式
令 F ⃗ \vec F F是一个向量场,应用散度定理,有:
∫ V ∇ x ⃗ ⋅ F ⃗ = ∫ S F ⃗ ⋅ n ^ d S \int_V \nabla_{\vec x}\cdot \vec F=\int_S \vec F \cdot \hat n dS ∫V∇x⋅F=∫SF⋅n^dS
根据:
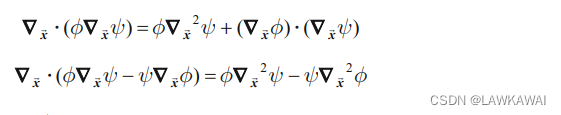
令 F ⃗ = ϕ ∇ x ⃗ ψ \vec F = \phi \nabla_{\vec x}\psi F=ϕ∇xψ,代入上面两个等式:
这就是格林第一公式
且有:

这就是格林第二公式
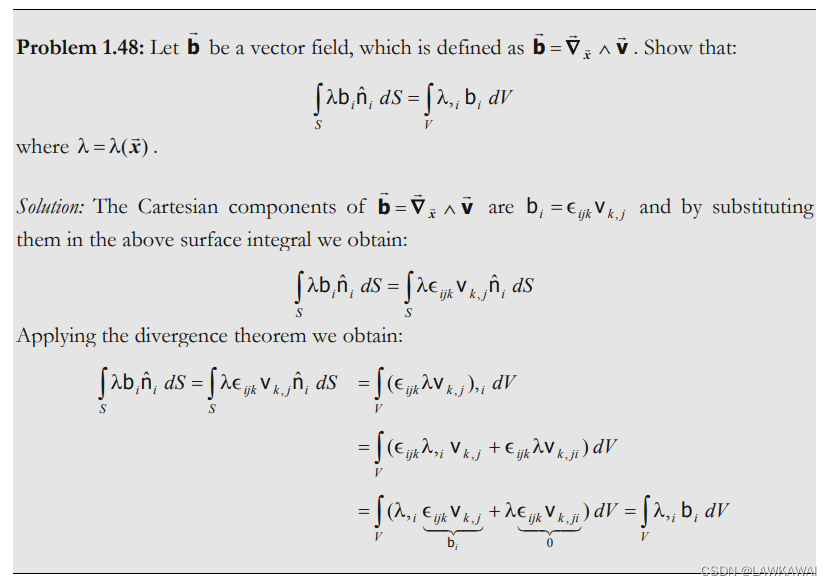
问题1.48 令 b ⃗ \vec b b是一个向量场,定义为 b ⃗ = ∇ ⃗ x ⃗ ∧ v ⃗ \vec b =\vec \nabla_{\vec x}\wedge \vec v b=∇x∧v,证明:
参考教材:
Eduardo W.V. Chaves, Notes On Continuum Mechanics
这篇关于【连续介质力学】涉及积分的定理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







