本文主要是介绍自动驾驶算法(十):多项式轨迹与Minimun Snap闭式求解原理及代码讲解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1 多项式轨迹与Minimun Snap闭式求解原理
2 代码解析
1 多项式轨迹与Minimun Snap闭式求解原理
我们上次说的Minimun Snap,其实我们就在求一个二次函数的最优解:
也就是优化函数
在约束
下的最小值。
但这是一个渐进最优解而不是解析最优解,是否有一个解析最优解呢?
我们用
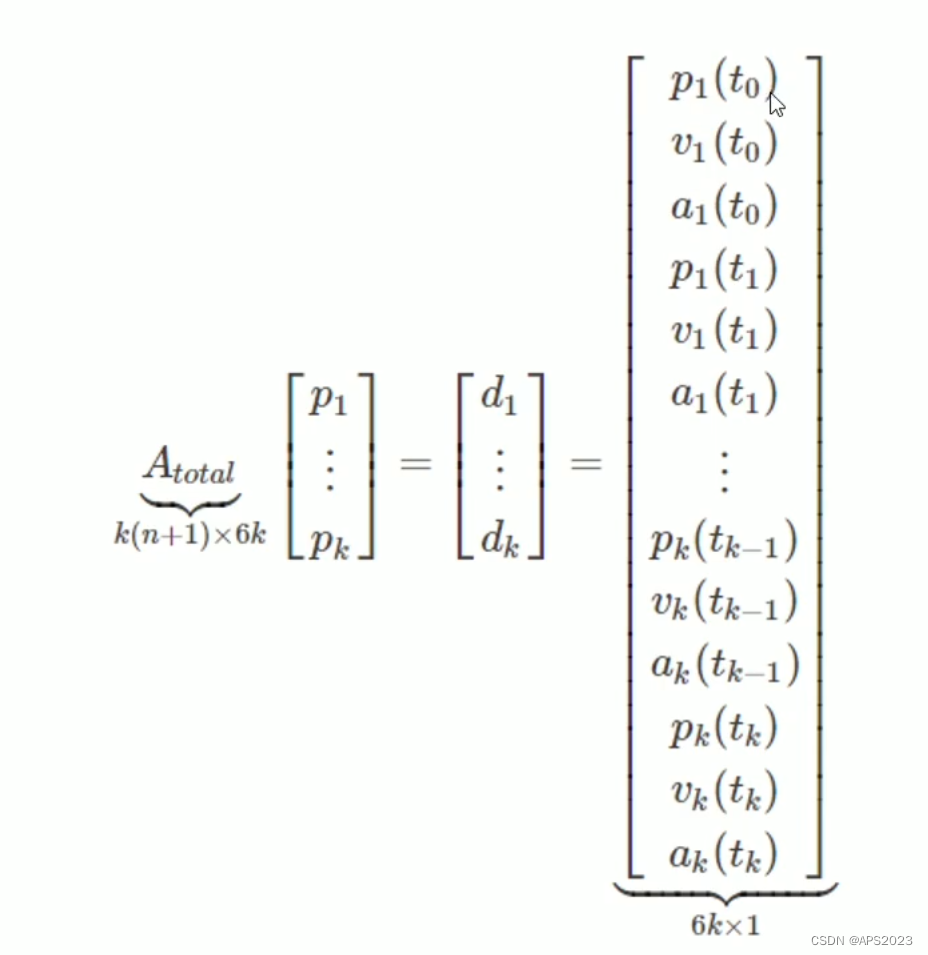
的形式表达:(d表示每一段路程中的起点和终点的位置、速度、加速度),比如
表示第一段起点的位置、速度、加速度、第一段终点的位置、速度、加速度。段数是k段,每段有起点和终点、起点终点有位置、速度加速度三个变量、因此维度为2*3k = 6k。
因此我们可以求出一个确定的p,带入
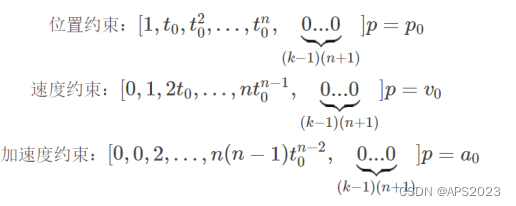
A矩阵的维度就是一共有K段每段是n+1阶的参数,各个段的位置为6,因此维度为k(n+1) * 6K
更进一步的说:
就是我们要求解的方程。
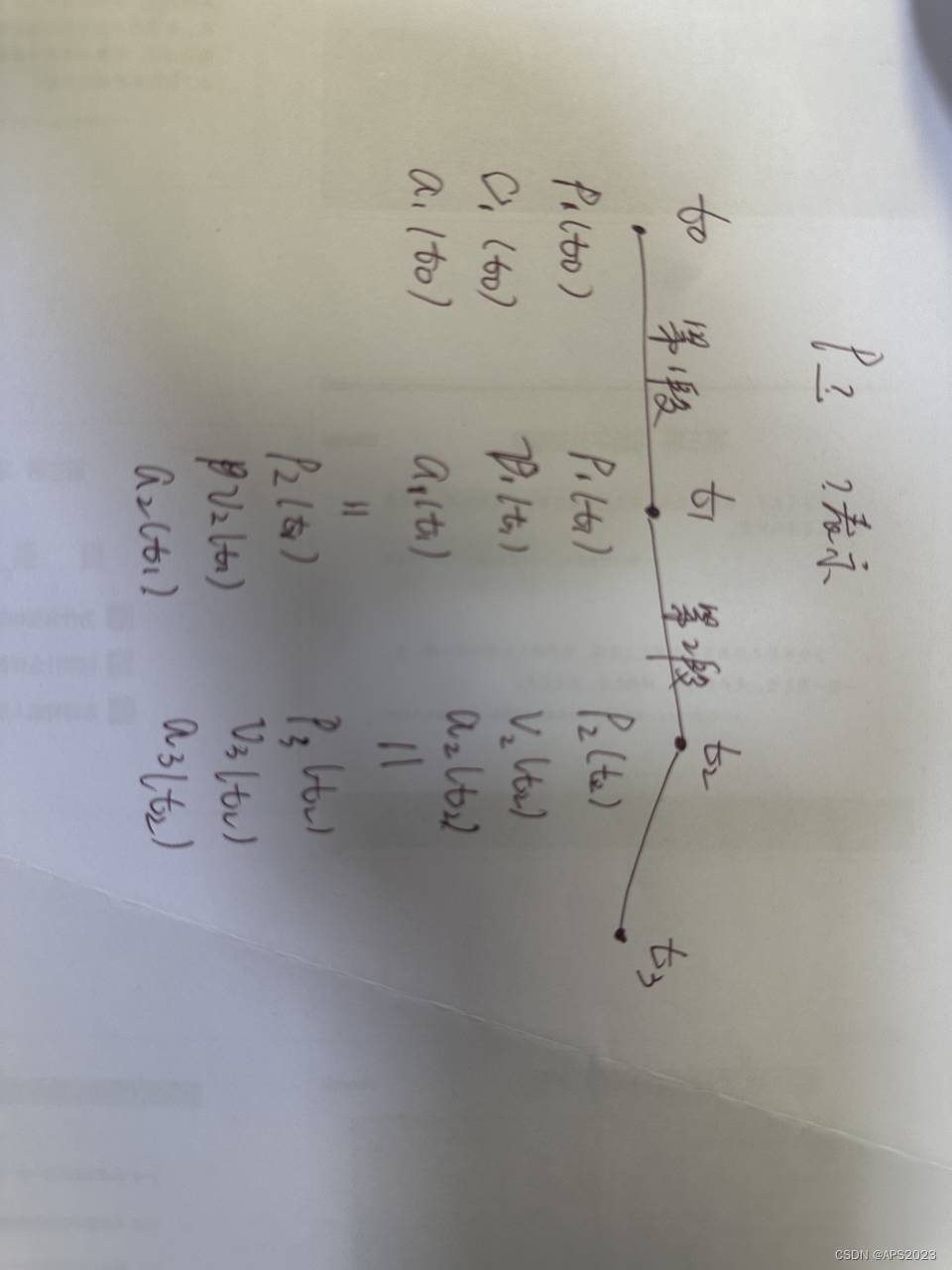
我们不妨先看一段,即第一段和第二段:
表示第i段。我画了个图:
那么
这个时间点就是1段的末尾和2段的初始点。
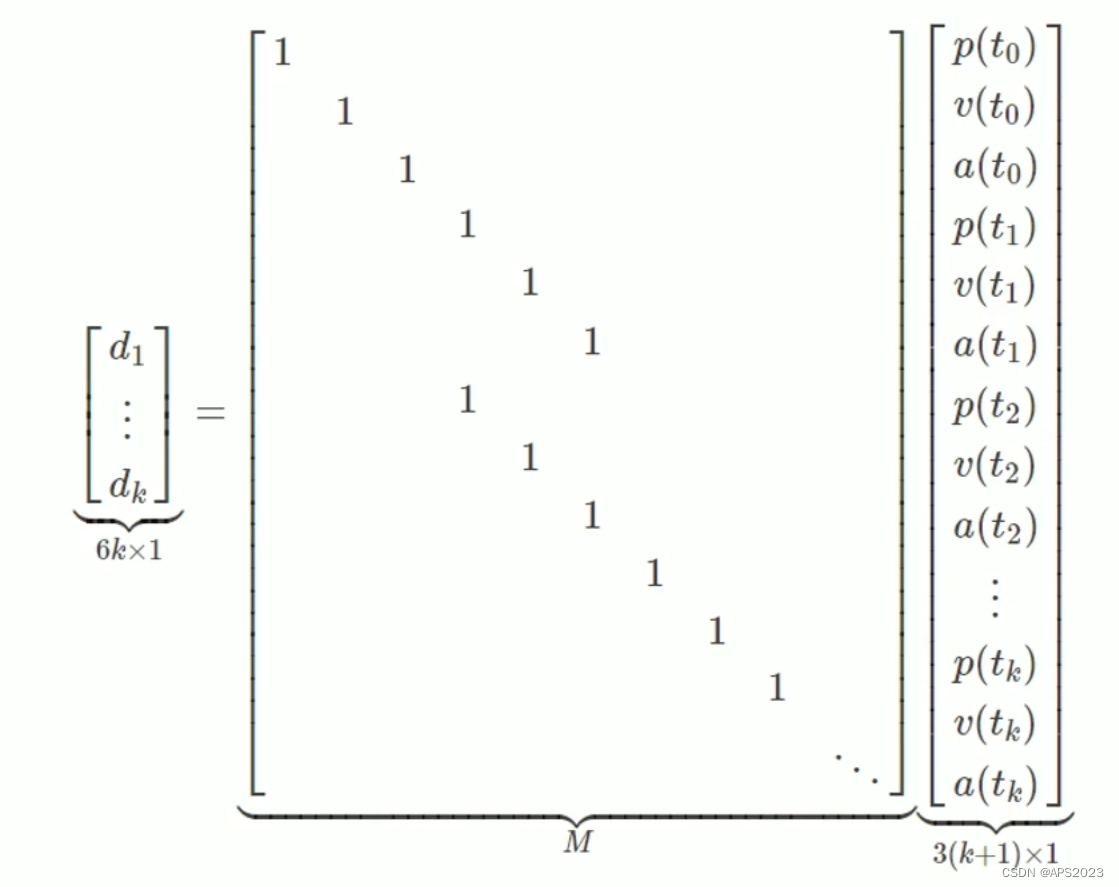
我们消除重复变量:
我们一共是k+1个航路点,每个航路点有p、v、a。因此矩阵大小为3(k+1)。
我们得到 d = Md'
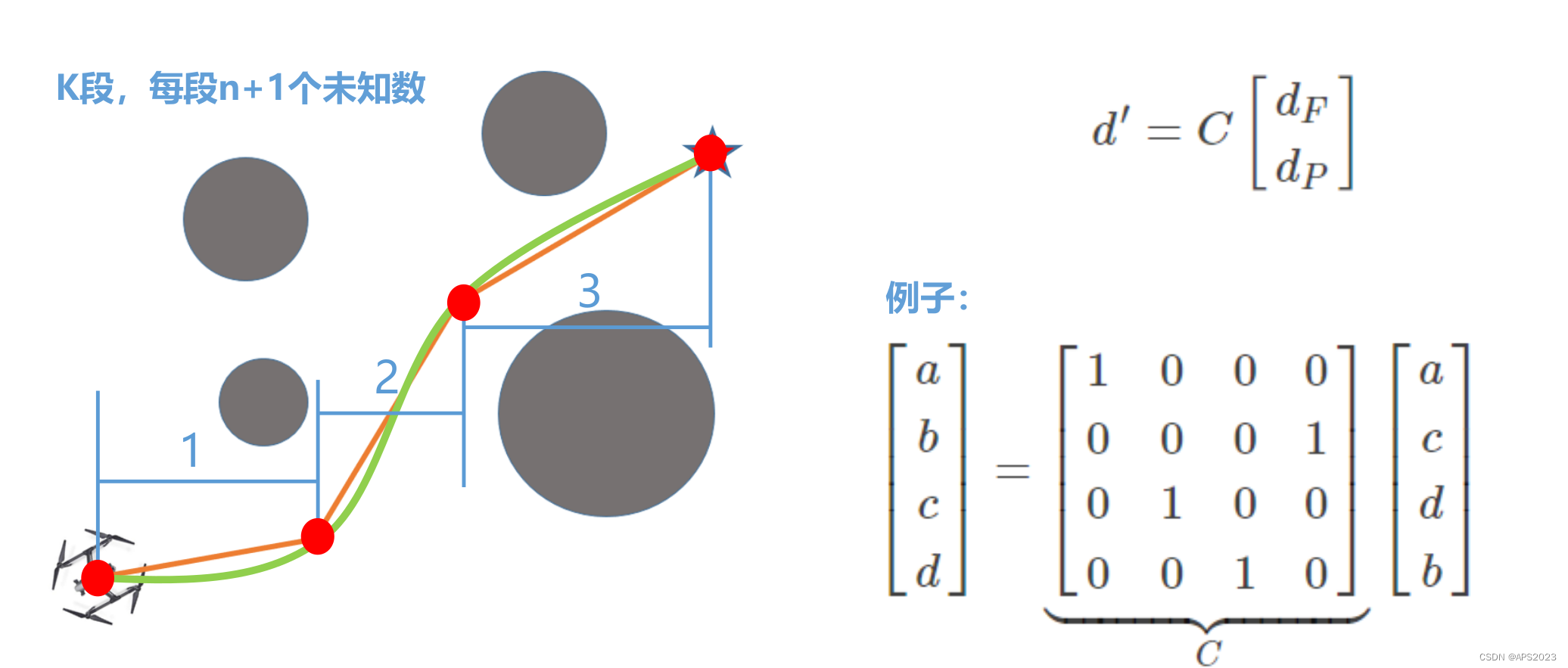
d' = C[dF dP]T,这里dF表示已知量,包括起点、终点的位移、速度、加速度,也包括中点间的已知量(我们要经过这些点)。dP表示未知量。我们可以看一个简单的例子:
我们把它写到一起:
我们就是dP未知,因此我们对dP求导,因此可以求出来dP的解析解。
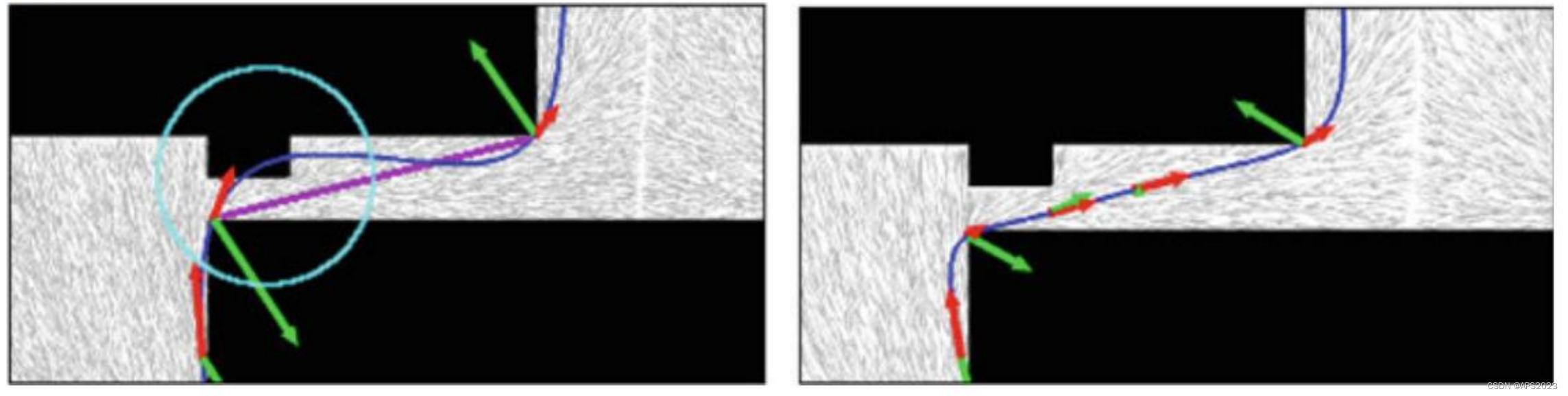
我们可以手动增加航路点避免碰撞:
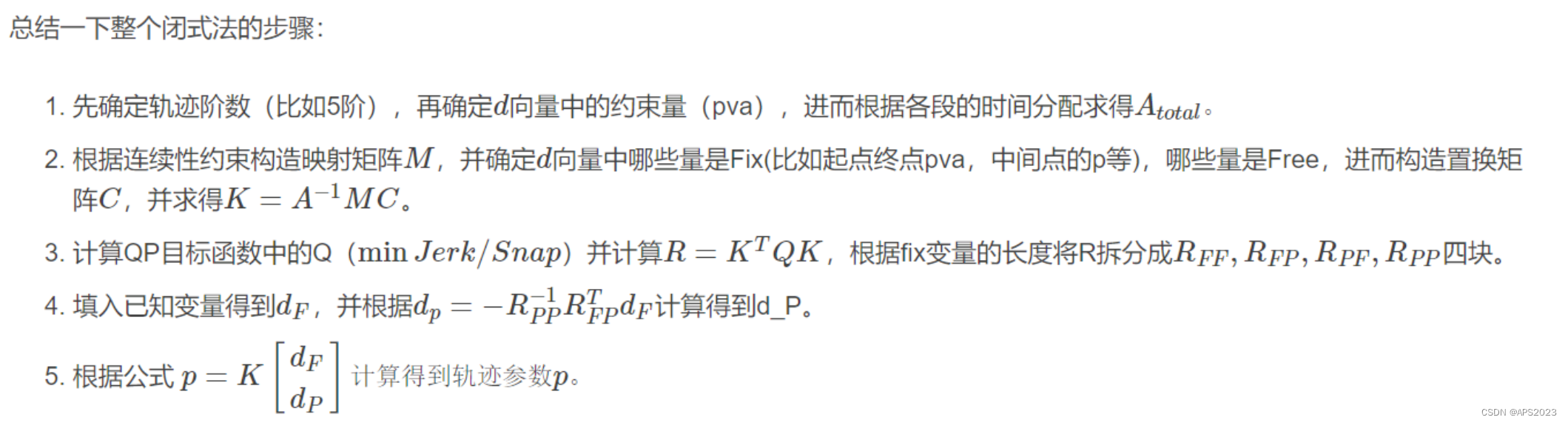
我们来总结一下闭式求解的步骤:



2 代码解析
我们只讲解和上篇博客不一样的地方:
我们先看一下运行结果:
我们来进行代码复现:
function polys = minimum_snap_single_axis_close_form(wayp,ts,n_order,v0,a0,v1,a1) % 参数个数 = 阶数+1 n_coef = n_order+1; % 多项式的段数:航路点-1 n_poly = length(wayp)-1; % 计算Q 和原来的一样 Q_all = []; for i=1:n_polyQ_all = blkdiag(Q_all,computeQ(n_order,3,ts(i),ts(i+1))); end这里依旧用n_coef表示参数个数(数量为拟合曲线的最大阶数+1),用n_poly表示多项式的段数,大小为航路点数量-1,Q的构造方式和上篇博客一致,不再赘述。
我们来看闭式求解的步骤,我们先来计算A矩阵:
% compute A (n_continuous*2*n_poly) * (n_coef*n_poly) n_continuous = 3; % 1:p 2:pv 3:pva 4:pvaj 5:pvajs % A的维度是 3*2*K(航路点个数) 阶数(N+1) * K A = zeros(n_continuous*2*n_poly,n_coef*n_poly); % 遍历每一段航路点 for i = 1:n_poly% 位置、速度、加速度for j = 1:n_continuous% 计算具体参数 j--参数个数(阶数+1)for k = j:n_coefif k==jt1 = 1;t2 = 1;else %k>jt1 = tk(i,k-j+1);t2 = tk(i+1,k-j+1);end% 每一段填充首和尾A(n_continuous*2*(i-1)+j,n_coef*(i-1)+k) = prod(k-j+1:k-1)*t1;A(n_continuous*2*(i-1)+n_continuous+j,n_coef*(i-1)+k) = prod(k-j+1:k-1)*t2;endend end
我们知道,如果我们的航路点是K段,我们要拟合多项式的次数为N。因此我们的A矩阵大小为航路点为K段,每段的话有起终点、每个起终点有X、V、A三个元素,因此我们的矩阵大小为 K*2*3 * (N+1)*K。
先给它初始化为0。我们遍历每一段航路点,先计算这段航路点的位移、速度、加速度。
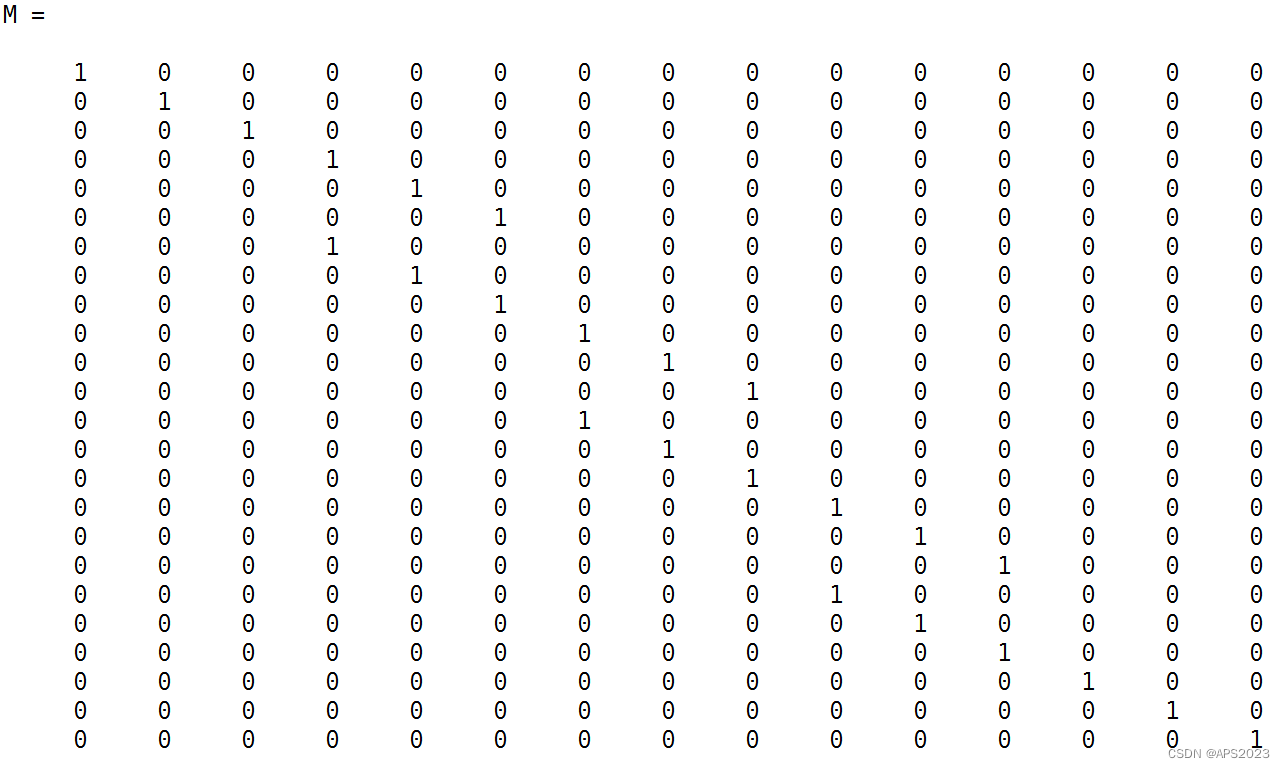
然后我们计算M矩阵:
M = zeros(n_poly*2*n_continuous,n_continuous*(n_poly+1)); for i = 1:n_poly*2j = floor(i/2)+1;rbeg = n_continuous*(i-1)+1;cbeg = n_continuous*(j-1)+1;M(rbeg:rbeg+n_continuous-1,cbeg:cbeg+n_continuous-1) = eye(n_continuous); end M
计算C矩阵和K矩阵:
% compute C num_d = n_continuous*(n_poly+1); C = eye(num_d); df = [wayp,v0,a0,v1,a1]';% fix all pos(n_poly+1) + start va(2) + end va(2) fix_idx = [1:3:num_d,2,3,num_d-1,num_d]; free_idx = setdiff(1:num_d,fix_idx); C = [C(:,fix_idx) C(:,free_idx)];% K AiMC = inv(A)*M*C; R = AiMC'*Q_all*AiMC;n_fix = length(fix_idx); Rff = R(1:n_fix,1:n_fix); Rpp = R(n_fix+1:end,n_fix+1:end); Rfp = R(1:n_fix,n_fix+1:end); Rpf = R(n_fix+1:end,1:n_fix);计算p恢复轨迹、位置、加速度:
dp = -inv(Rpp)*Rfp'*df;p = AiMC*[df;dp];polys = reshape(p,n_coef,n_poly);

这篇关于自动驾驶算法(十):多项式轨迹与Minimun Snap闭式求解原理及代码讲解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






