本文主要是介绍Open3D 点云下采样抽稀(7),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Open3D 点云下采样抽稀(7)
- 一、算法介绍
- 二、算法实现
- 1.代码
一、算法介绍
点云抽稀在计算机图形学和计算机视觉中有着广泛的应用,其作用包括但不限于以下几点:
数据压缩: 点云抽稀可以有效地减少点云数据量,从而节省存储空间和降低数据传输成本。
加速处理: 较为密集的点云通常需要更多的计算资源进行处理,抽稀可以减少数据点的数量,从而加快处理速度和提高计算效率。
去除噪声: 一些点云数据可能受到噪声的影响,通过抽稀可以去除一些无意义的离散噪声点,使得数据更加干净。
可视化优化: 在进行点云可视化时,过于密集的点云可能会导致可视化效果混乱,抽稀可以使可视化结果更清晰易懂。
简化模型: 对于点云表示的三维模型,抽稀可以简化模型并减少细节,使得模型更易处理和渲染。
总的来说,点云抽稀可以通过减少数据量、加快处理速度、去除噪声等方式,对点云数据进行预处理和优化,以满足不同应用场景下的需求。
二、算法实现
1.代码
代码如下(示例):
import open3d as o3d# 读取点云数据
point_cloud = o3d.io.read_point_cloud("D:\\shuju\\原始点云.pcd")# 设置均匀采样(半径滤波)的参数
# 这里以每10个点进行一次采样为例
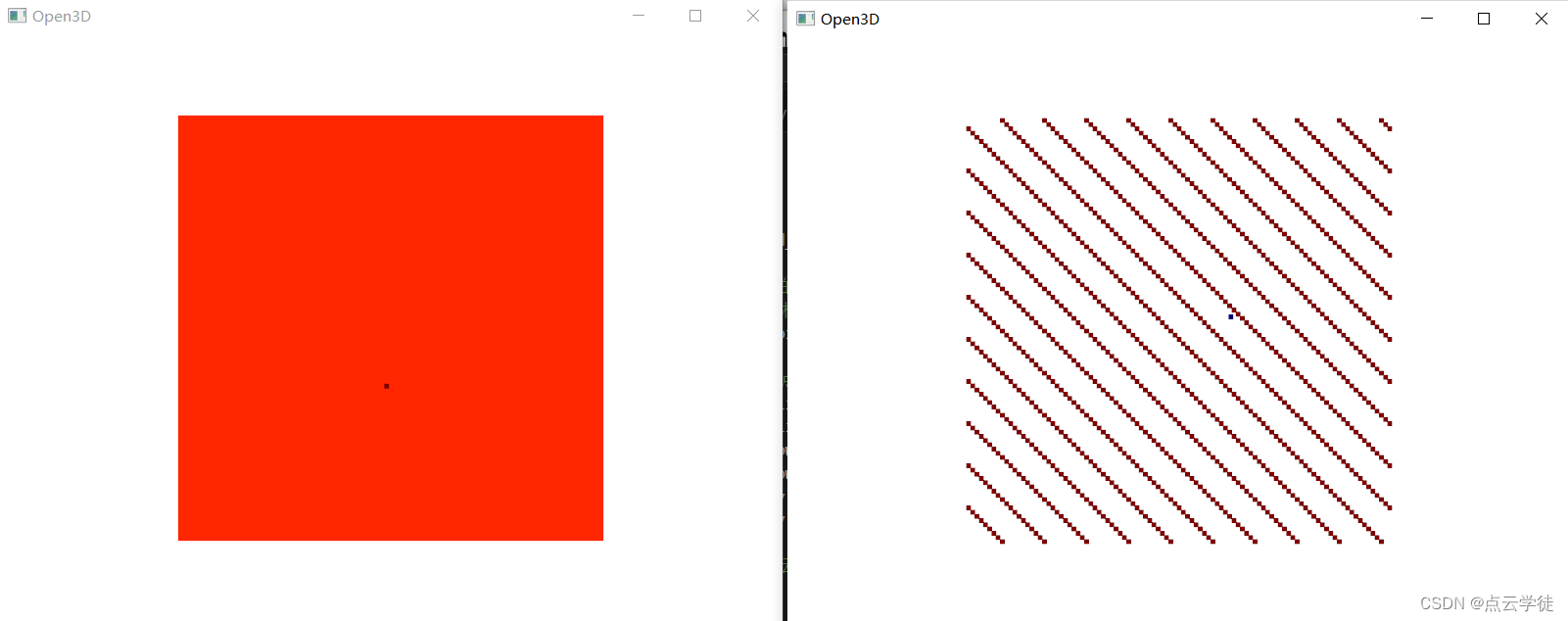
filtered_point_cloud = point_cloud.uniform_down_sample(every_k_points=10)# 创建可视化窗口并添加原始点云和滤波后的点云
vis_original = o3d.visualization.Visualizer()
vis_filtered = o3d.visualization.Visualizer()
vis_original.create_window(width=800, height=600)
vis_filtered.create_window(width=800, height=600)
vis_original.add_geometry(point_cloud)
vis_filtered.add_geometry(filtered_point_cloud)# 显示原始点云和滤波后的点云
vis_original.run()
vis_filtered.run()# 写出滤波后的点云数据
o3d.io.write_point_cloud("D:\\shuju\\结果点云.pcd", filtered_point_cloud)这篇关于Open3D 点云下采样抽稀(7)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!