本文主要是介绍【编队】基于A星算法实现机器人编队栅格地图巡逻路径规划附matlab代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
⛄ 内容介绍
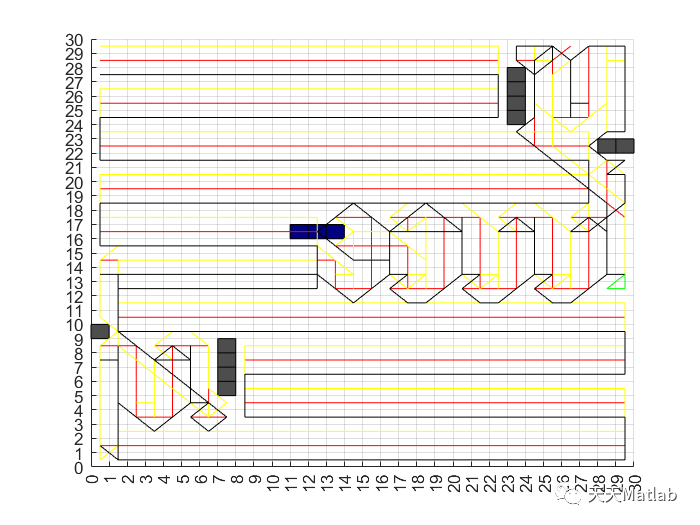
基于A*(A-star)算法实现机器人编队栅格地图巡逻路径规划可以通过以下步骤实1. 地图建模:将巡逻区域的地图转化为栅格地图,即将地图划分为网格单元,并确定每个单元的状态,如障碍物、可通过区域和目标等。
-
设置起点和目标点:选择机器人的初始位置作为起点,并设置巡逻区域内需要覆盖的目标点。
-
定义启发式函数:定义用于评估每个栅格的优先级的启发式函数。启发式函数可根据距离、预计代价和其他因素来评估栅格的优先级,以指导路径搜索过。
-
实施A算法:使用A算法搜索最佳路径。通过在栅格上移动并考虑邻居栅,在栅格地图上进行迭代,直到找到目标位置或遍历了所有可能的栅格。
-
路径优化:对A*算法得到的路径进行优化,例如使用平滑技术或替代路径搜索方法,确保路径的效率和安全性。
-
生成各机器人编队路径:如果有多个机器人组成编队,则可以根据具体任务和编队要求,复制和调整主路径以路径:将生成的路径导入到机器人控制系统中,并实时控制机器人按照路径进行巡逻。
注意的是,A*算法在路径规划中被广泛采用,但在实际应用中可能需要考虑更多的因素,如动态障碍物避免、实时地图更新等。此外,路径规划的准确性也取决于栅格地图的精细度和对环境的准确感知。
⛄ 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% A* ALGORITHM% 04-26-2005% Vivian Paul%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%clcclose all%DEFINE THE 2-D MAP ARRAYMAX_X=30;MAX_Y=30;MAX_VAL=10;OPEN_COUNT=0;CLOSED_COUNT=0;%This array stores the coordinates of the map and the%Objects in each coordinateMAP=2*(ones(MAX_X,MAX_Y));% Obtain Obstacle, Target and Robot Position% Initialize the MAP with input values% Obstacle=-1,Target = 0,Robot=1,Space=2i=0;j=0;x_val = 1;y_val = 1;axis([0 MAX_X,0 MAX_Y])set(gca,'xtick',0:1:30,'ytick',0:1:30,'GridLineStyle','-',...'xGrid','on','yGrid','on')%grid on;hold on;n=0;%Number of Obstaclesrectangle('Position',[7,5,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[7,6,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[7,7,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[7,8,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[23,27,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[23,24,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[23,25,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[23,26,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[29,22,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[28,22,1,1],'FaceColor',[0.3 0.3 0.3]);rectangle('Position',[0,9,1,1],'FaceColor',[0.3 0.3 0.3]);MAP(24,28)=-1;MAP(24,27)=-1;MAP(24,26)=-1;MAP(24,25)=-1;MAP(8,6)=-1;MAP(8,7)=-1;MAP(8,8)=-1;MAP(8,9)=-1;MAP(30,23)=-1;MAP(29,23)=-1;MAP(1,10)=-1;z=1;Optimal_path1=[];m=0;flag=1;for j=29:-1:0if flag == 1%正向k=j+1;while(MAP(m+1,j+1)==-1)m=m+1;Optimal_path1(z,1)=m;Optimal_path1(z,2)=k;z=z+1;endfor i=m:1:29if(MAP(i+1,j+1)==-1)flag=0;m=i-1;break;elseOptimal_path1(z,1)=i;Optimal_path1(z,2)=j;disp('z:');disp(z);disp('i');disp(i);disp('j');disp(j);z=z+1;if i==29flag=0;m=i;endendendelse%反向k=j+1;while(MAP(m+1,j+1)==-1)m=m-1;Optimal_path1(z,1)=m;Optimal_path1(z,2)=k;z=z+1;endfor i=m:-1:0if(MAP(i+1,j+1)~=-1)Optimal_path1(z,1)=i;Optimal_path1(z,2)=j;disp('z:');disp(z);disp('i');disp(i);disp('j');disp(j);z=z+1;if i==0flag=1;m=i;endelseflag=1;m=i+1;break;endendendendplot(Optimal_path1(:,1)+.5,Optimal_path1(:,2)+.5,'linewidth',2);
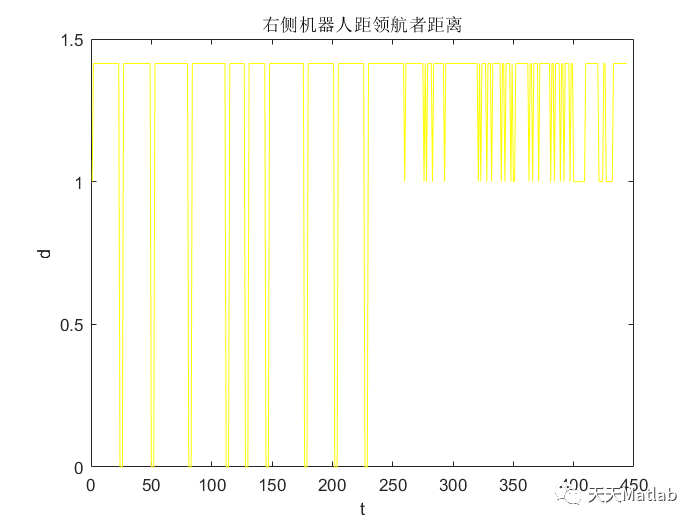
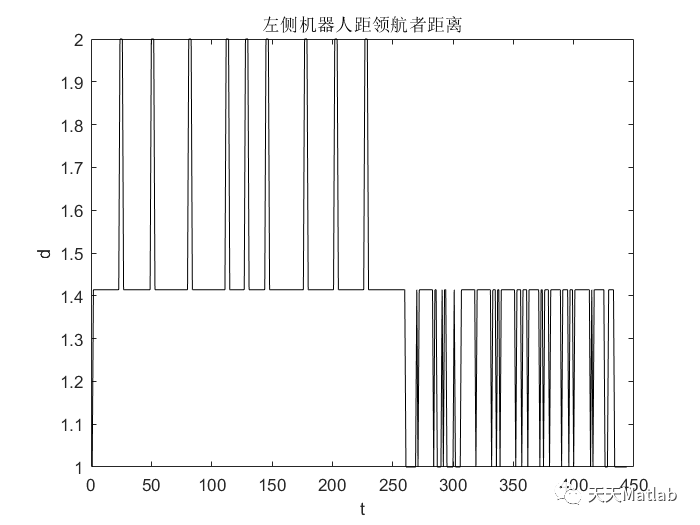
⛄ 运行结果
⛄ 参考文献
[1] 陆浩.基于人工势场-蚁群算法的多移动机器人编队及路径规划的研究[D].山东科技大学,2020.
[2] 黄晨.多机器人编队控制算法的研究与实现[D].哈尔滨工业大学,2012.DOI:CNKI:CDMD:2.1012.001053.
[3] 王一博.多机器人分布式编队控制算法研究与实现[D].哈尔滨工业大学[2023-07-03].DOI:CNKI:CDMD:2.1014.003445.
[4] 周宇杭,王文明,李泽彬,等.基于A星算法的移动机器人路径规划应用研究[J].电脑知识与技术:学术版, 2020, 16(13):4.DOI:CNKI:SUN:DNZS.0.2020-13-001.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
🍅 仿真咨询
1.卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3.旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划
4.无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
5.传感器部署优化、通信协议优化、路由优化、目标定位
6.信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号
7.生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化
8.微电网优化、无功优化、配电网重构、储能配置
9.元胞自动机交通流 人群疏散 病毒扩散 晶体生长
这篇关于【编队】基于A星算法实现机器人编队栅格地图巡逻路径规划附matlab代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




