编队专题

2018 年 5 月 1 日西安 1374 架无人机编队表演出现失误的原因是什么?
回答: 1、 作者:franchbach 链接:https://www.zhihu.com/question/275543118/answer/381523237 来源:知乎 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。 看了几个答主的答案感觉并未回答到点子上。 很多搞无人机的应该都知道要达到厘米级别定位编队飞行,光靠普通无人机自带的GPS导航定位是不能满足的,

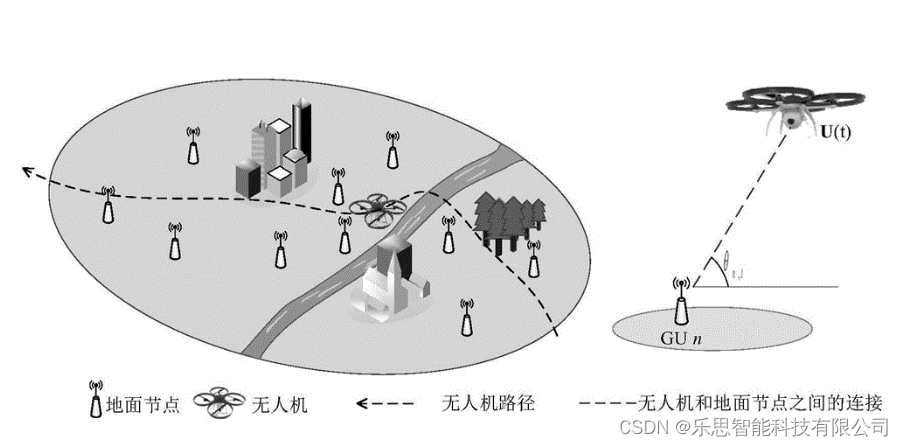
有人/无人机编队队形集结控制研究
源自:系统工程与电子学报 作者:吴立尧 苏析超 王垒 潘子双 注:若出现无法显示完全的情况,可搜索“人工智能技术与咨询”查看完整文章 摘 要 针对有人/无人机(manned/unmanned aerial vehicle, MAV/UAV)编队队形集结控制问题,设计了一种基于航迹规划-跟踪的MAV/UAV编队集结控制策略。首先,考虑编队队形集结边界约束与防碰撞约束条件,设计了一种基于D


2023年第一家倒下的自动驾驶公司,L4重卡编队何去何从?
作者 | 卡车技术前线 编辑 | 计算机视觉life 点击下方卡片,关注“自动驾驶之心”公众号 ADAS巨卷干货,即可获取 Locomation即将关闭 2023年2月23日消息,位于美国匹兹堡地区的自动驾驶卡车初创公司Locomation即将于本月底关闭。如果成为现实,这将是宾夕法尼亚州匹兹堡地区继鼎鼎大名的Argo AI于2022年10月突然关闭之后的4个月内关闭的第二家自动驾驶
手把手教你无人机编队(一):概述
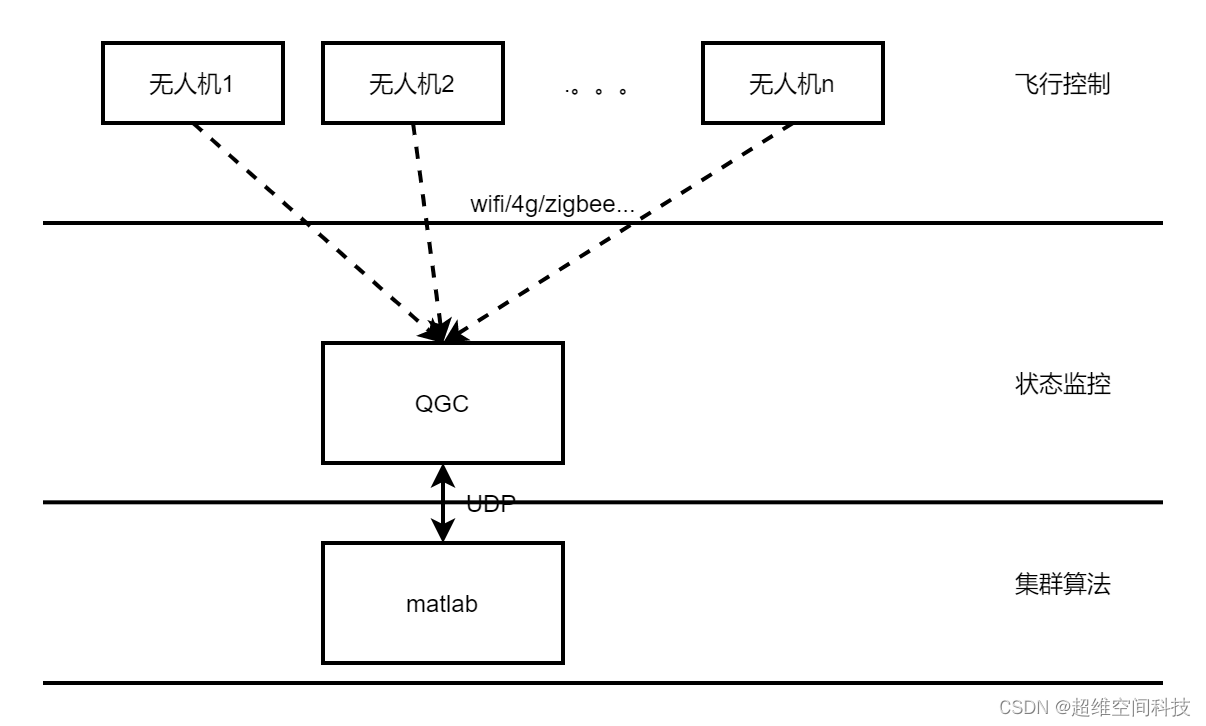
文章目录 前言一、无人机集群的优势二、无人机集群的难点三、无人机集群的用途四、如何实现无人机集群五、文章大纲1、概述2、单机控制接口3、自定义mavlink消息4、机间通信实现5、多机地面站6、集群逻辑实现7、测试 前言 本教程的适用对象: 零基础 研究无人机集群的学生或爱好者 硬件: Pixhawk 2.4.8 F450 2.4g电台 (每架无人机的成本约在一千到两千) 软
无人机编队通信网络搭建
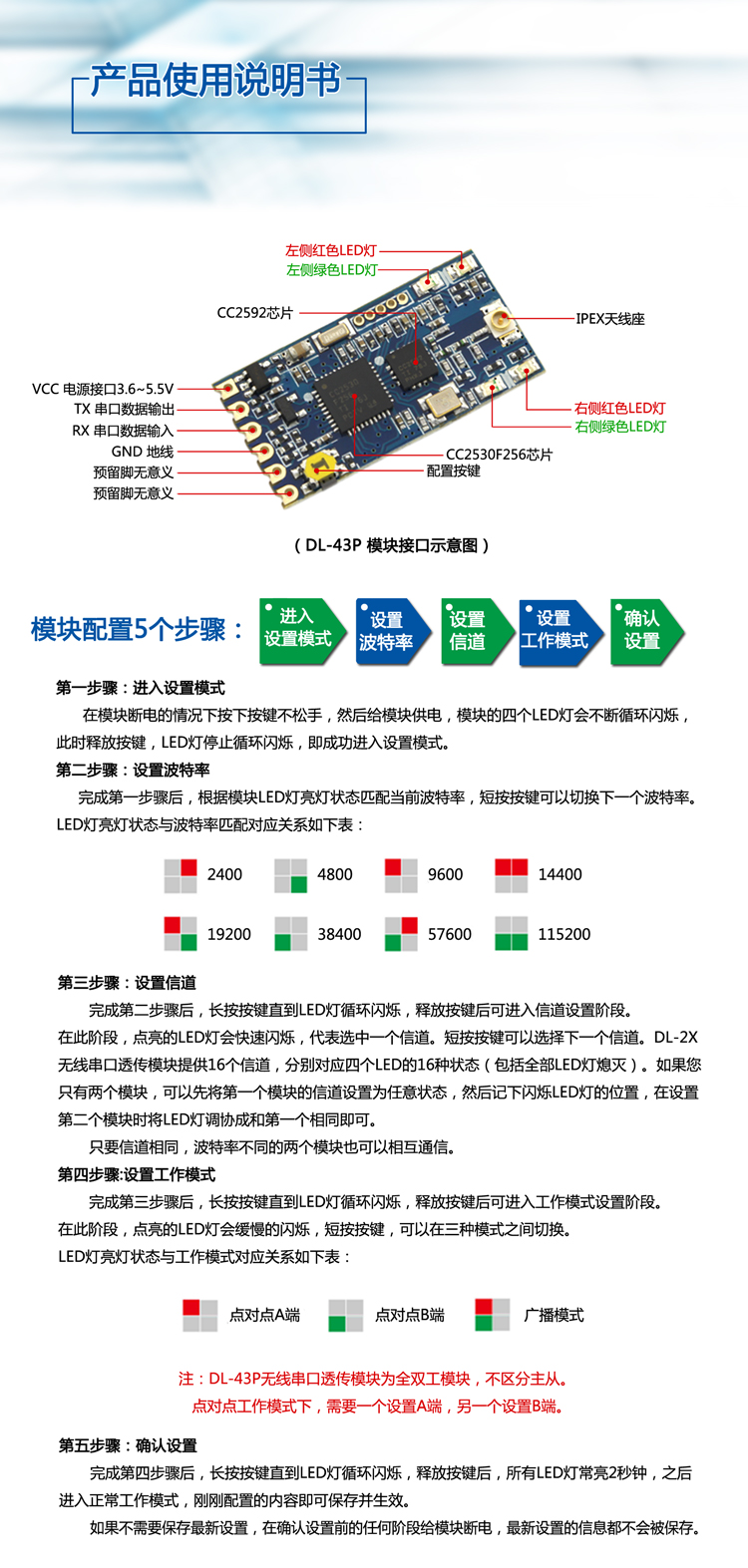
文章目录 前言一、ESP8266 WIFI模块1.1电脑热点设置1.2esp8266设置 二、P9001.接线2.数传配置2.1旧版P900的配置方法2.2新版P900的配置方法 3.地面站配置4.常见问题 三、DL-43P 前言 ubuntu20.04 手把手教你无人机编队(七):测试7.2 多机通信搭建 一、ESP8266 WIFI模块 使用的硬件是淘
第十二届“中关村青联杯”全国研究生数学建模竞赛-A题:水面舰艇编队防空和信息化战争评估模型(续)(附MATLAB代码实现)
目录 5.3.3 问题三的总结 5.4 问题四的模型建立与求解 5.4.1 问题分析 5.4.2 计算方位角和航向角
无人机编队路径规划算法的Matlab实现
室内多智能体协同控制是指在密闭空间内的各个无人机及无人车在运动时能够相互之间保持一定的相对距离,并在速度及位置上按照预设路线或命令进行运动的过程。本平台的多智能体协同定位采用光学运动捕捉技术,并通过WiFi网络实现多机、多车间的通信,用户能够将开发的无人机及无人车编队仿真控制算法直接生成代码下载到无人机及无人车中,在室内环境下进行多机、多车分布式编队算法的验证。 2、特征优势 (1)室内定位
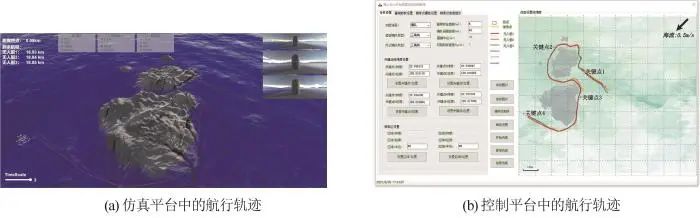
无人船实时路径规划与编队控制仿真研究
源自:系统仿真学报 作者:宋大雷 干文浩 许嘤枝 曲秀青 曹江丽 摘 要 安全和无碰撞导航是无人船正常航行的基础。通过Unity3D构建高保真的虚拟海洋环境,在无人船建模基础上,提出一种面向未知复杂环境的实时路径规划及编队控制方法。利用激光雷达获取的局部环境信息,在重规划的策略下,结合A-star以及航路抽稀方法完成实时局部路径规划。基于领航-跟随者策略与一致性方法进行编队控制
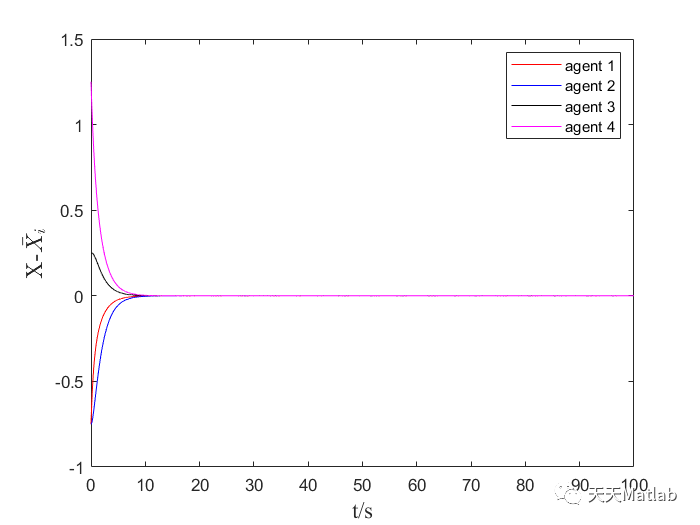
【无人机编队】基于一阶一致性实现无领导多无人机协同编队控制附matlab仿真
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划
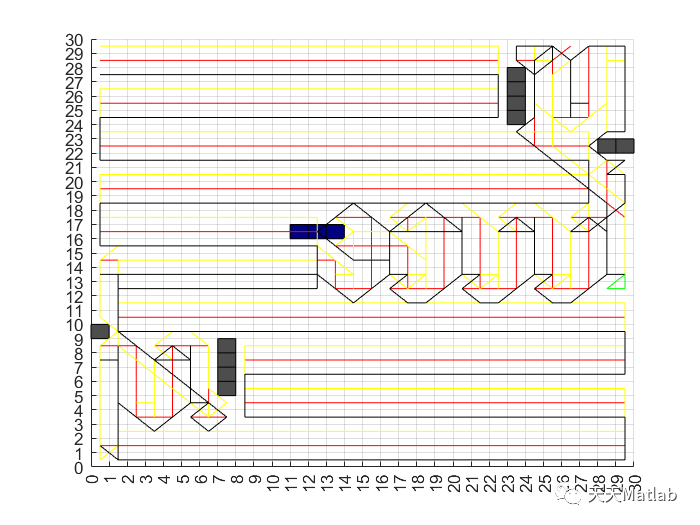
【编队】基于A星算法实现机器人编队栅格地图巡逻路径规划附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划

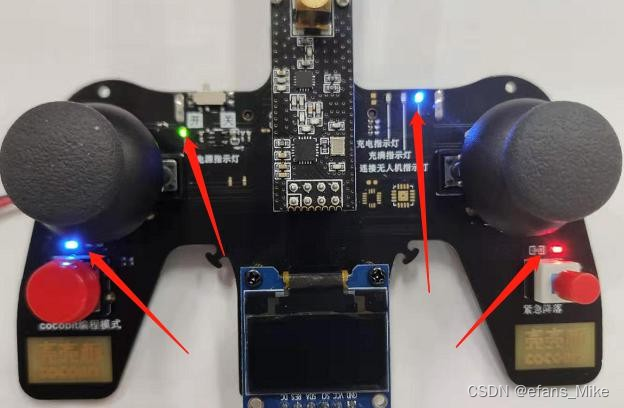
【开源教程20】疯壳·开源编队无人机-ADC(摇杆控制)
COCOFLY教程 ——疯壳·无人机·系列 ADC(摇杆控制) 图1 一、摇杆 1.1摇杆简介 摇杆由于符合人体工学、操作简单,广泛应用于各类的玩具中,例如遥控飞机、遥控小车等。如下图所示为摇杆模块的实物图。 图2 1.2摇杆原理 摇杆的根本无非就是两个电位器,也
【开源教程19】疯壳·开源编队无人机-中断(按键检测)
COCOFLY教程 ——疯壳·无人机·系列 中断(按键检测) 图1 一、轻触按键 1.1轻触按键简介 轻触按键是众多按键中的一款产品,它其实相当于是一种电子开关,只要轻轻的按下按键就可以把开关接通,松开时把开关断开。轻触按键由于微动开关的特性以及体积小、质量轻的优势在家用电器方面得到了广泛的应用,应用场景有: 电视机按键、遥控器按键、电脑按键、键盘按键、显示器按键、照明按键等,

多机器人三角形编队的实现
文章目录 前言一、机器人编队前的准备二、配置仿真环境2.编写机器人编队.cpp文件 三、三角形编队测试 前言 前阵子一直想要实现多机器人编队,找到了很多开源的编队代码,经过好几天的思索,终于实现了在gazebo环境中的TB3三角形机器人编队。 一、机器人编队前的准备 本次实现的多机器人三角形编队是在之前配置完成的单个TB3机器人基础上实现的,如果想要配置单个机器人可以