本文主要是介绍手把手教你无人机编队(一):概述,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- 一、无人机集群的优势
- 二、无人机集群的难点
- 三、无人机集群的用途
- 四、如何实现无人机集群
- 五、文章大纲
- 1、概述
- 2、单机控制接口
- 3、自定义mavlink消息
- 4、机间通信实现
- 5、多机地面站
- 6、集群逻辑实现
- 7、测试
前言
本教程的适用对象:
零基础
研究无人机集群的学生或爱好者
硬件:
Pixhawk 2.4.8
F450
2.4g电台
(每架无人机的成本约在一千到两千)
软件:
PX4 1.13
QGC 4.2
手把手教你无人机编队(一):概述
一、无人机集群的优势
1,效率更高,相比单机可以缩短完成任务所需时间
2,执行任务的区域范围增加
3,容错能力强,某架无人机失效,其他无人机可以替补
二、无人机集群的难点
1,机间防撞
2,机间通信
3,集群策略
三、无人机集群的用途
1,军事(侦察打击)
2,民用(灯光表演)
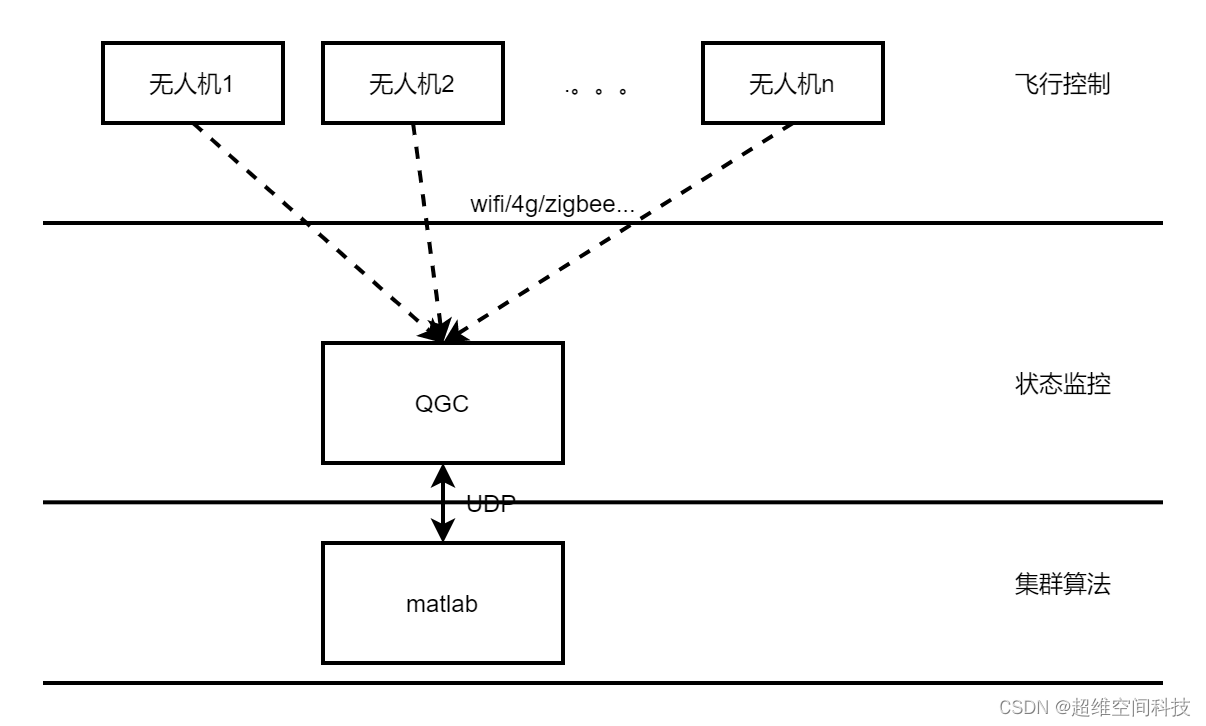
四、如何实现无人机集群
1,单机硬件搭建,首选开源飞控之王pixhawk(当然其他飞控也可以,最好是开源的)
2、选择通信数传,例如wifi,4g,5g,2.4g,P900,zibee等,要根据通信距离、价格等综合考虑
3、编写多机地面站(可以用QGC或者MP二次开发)
4、编写集群策略(在飞控或者地面站端编写)
5、测试
五、文章大纲
1、概述
2、单机控制接口
3、自定义mavlink消息
4、机间通信实现
5、多机地面站
6、集群逻辑实现
matlabR2023A
7、测试
这篇关于手把手教你无人机编队(一):概述的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








