本文主要是介绍无人机编队路径规划算法的Matlab实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
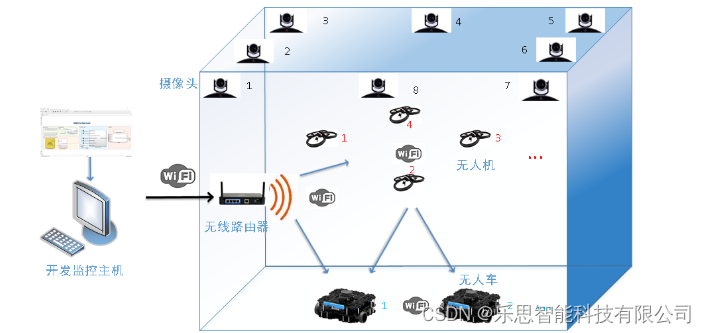
室内多智能体协同控制是指在密闭空间内的各个无人机及无人车在运动时能够相互之间保持一定的相对距离,并在速度及位置上按照预设路线或命令进行运动的过程。本平台的多智能体协同定位采用光学运动捕捉技术,并通过WiFi网络实现多机、多车间的通信,用户能够将开发的无人机及无人车编队仿真控制算法直接生成代码下载到无人机及无人车中,在室内环境下进行多机、多车分布式编队算法的验证。
2、特征优势
(1)室内定位系统
采用室内光学运动捕捉技术,定位范围5m×5m(可定制扩展),支持毫米级定位,能够最多同时捕捉12架左右的无人机或无人车;
(2)多智能体
本平台系统支持4架无人机及2台无人车进行编队实验(被控对象数目可根据实验室具体情况扩展);
(3)基础开发平台
可在MATLAB/Simulink软件平台上进行的控制算法研究,支持自动生成代码,通过无线WiFi下载到无人机飞控板及无人车控制板;
(4)扩展开发语言
系统支持C、C++、python编程,适合有一定代码开发能力的学生,进一步锤炼代码编程能力;
(5)ROS学习开发
提供了ROS的支持包,可实现Simulink控制模型到ROS系统代码的自动生成,降低了ROS系统控制模型的开发难度,适合大众化本科教学实验。
(6)应用方向
可用于无人工具的动态建模和控制研究、运动规划、避障控制、多信息融合、编队控制、多智能体协调控制、无人工具自主控制等。
无人机编队路径规划是一个复杂的问题,需要根
据具体的场景和需求选择不同的算法。
下面提供一种比较常见的算法,该算法包括以下几个步骤:
计算每个无人机和最近路径点之间的距离和偏角。
计算目标加速度和角速度,以达到在最短距离和最小角度误差之间平衡。
根据目标速度和加速度计算无人机的x轴速度vx、y轴速度vy和航向角heading,以达到目标位姿。
重复上述步骤,直到所有无人机达到其目标位姿。
#include <stdio.h>
#include <math.h>#define MAX 100struct drone {double x; //无人机的x坐标double y; //无人机的y坐标double vx; //无人机的x轴速度double vy; //无人机的y轴速度double ax; //无人机的x轴加速度double ay; //无人机的y轴加速度double heading; //无人机的航向角double speed; //无人机的速度double distance; //无人机和目标点的距离double angle; //无人机和目标点的偏角
};struct path {double x; //路径点x坐标double y; //路径点y坐标
};void path_planning(struct drone drones[], int num_drones, struct path paths[], int num_path) {for (int i = 0; i < num_drones; i++) {//计算每个无人机和最近路径点之间的距离和偏角int nearest_index = -1; //最近的路径点索引double nearest_distance = INFINITY; //到最近路径点的距离for (int j = 0; j < num_path; j++) {double distance = sqrt(pow(drones[i].x - paths[j].x, 2) + pow(drones[i].y - paths[j].y, 2));double angle = atan2(paths[j].y - drones[i].y, paths[j].x - drones[i].x);angle -= drones[i].heading;if (distance < nearest_distance) {nearest_index = j;nearest_distance = distance;drones[i].distance = distance;drones[i].angle = angle;}}//计算目标速度和角速度double k1 = 1.0, k2 = 1.0; //调节参数drones[i].ax = k1 * drones[i].distance * cos(drones[i].angle);drones[i].ay = k1 * drones[i].distance * sin(drones[i].angle);double heading_error = atan2(drones[i].ay, drones[i].ax);double w = k2 * heading_error;//计算目标速度double max_speed = 10.0; //最大速度drones[i].speed = fmin(max_speed, k1 * drones[i].distance);//计算目标速度和角速度drones[i].vx = drones[i].speed * cos(drones[i].heading) + drones[i].ax;drones[i].vy = drones[i].speed * sin(drones[i].heading) + drones[i].ay;drones[i].heading += w; //更新无人机的航向角}
}int main() {struct drone drones[MAX] = {{1.0, 2.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0},{3.0, 4.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0},{2.0, 3.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0}};struct path paths[MAX] = {{5.0, 1.0},{4.0, 4.0},{1.0, 6.0}};path_planning(drones, 3, paths, 3);for (int i = 0; i < 3; i++) {printf("Drone %d: x=%lf, y=%lf, vx=%lf, vy=%lf\n", i + 1, drones[i].x, drones[i].y, drones[i].vx, drones[i].vy);}return 0;
}上面的代码演示了如何将无人机从当前位置移动到一组给定路径点。可以看到,在此算法中,每个无人机从列表中的路径点中查找最近的一个,并在最近路径点处更新其目标x、y坐标和航向角。此外,还使用调节参数和当前航向角计算目标加速度、目标角速度和目标速度。
虽然这个简单的例子是一个可行的路径规划算法,但在实际应用中,可能需要更加复杂和高级的算法来适应现实世界中各种各样复杂多变的场景和需求。
对于更加复杂的场合,还可以使用一些强化学习算法,例如深度强化学习(DeepRL)算法,以实现更为智能化和自适应的无人机编队路径规划。这些算法使用神经网络模型来学习无人机的行为和环境之间的关系,以优化位置、速度、角速度等策略,以实现最优的路径规划方案。
在使用深度强化学习算法时,通常需要具备以下步骤:
1.定义智能体的状态,动作和奖励函数。 2.使用模拟器或真实场景下进行一系列训练,通过调整神经网络的权重,使其优化损失函数。 3.在模拟器或真实场景下进行一系列测试,以评估性能指标并进行调整和改进。
深度强化学习算法为无人机编队路径规划提供了一种更加灵活和具有自适应性的方法。它可以根据实际场景和应用需求来制定相应的奖励函数和学习策略,以实现更加理想的编队路径规划方案。
这篇关于无人机编队路径规划算法的Matlab实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





