巡逻专题
【UE5.1】NPC人工智能——07 NPC在巡逻过程中休息
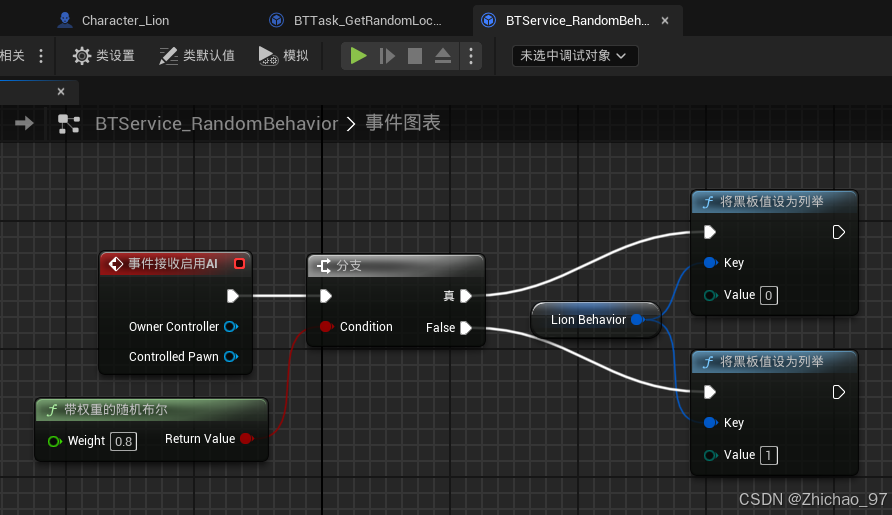
目录 前言 效果 步骤 一、准备狮子休息的动画 二、实现狮子休息效果 三、随机行为 四、增加行为权重 前言 在上一篇中(【UE5.1】NPC人工智能——06 NPC攻击)我们已经实现了NPC狮子追到玩家后进行攻击的功能。本篇将在上一篇的基础上继续实现NPC在巡逻过程中偶尔休息的功能。 效果 步骤 一、准备狮子休息的动画 1. 找到狮子休息的动画
![P3629 [APIO2010]巡逻(树的直径)](https://i-blog.csdnimg.cn/blog_migrate/797884d11995996be42e461ca50233f3.png)
P3629 [APIO2010]巡逻(树的直径)
题目链接 易错点: l2必须要设置全局变量而不能设置局部变量,这是由于设置局部变量无法兼顾所有情况造成的.bfs并设置直径上边权为-1后,如果k=2则不能继续直接使用bfs获得答案,这是bfs的拓展加点性造成的(类比dijkstra).如果两个变量可以用一个变量导出就用一个变量. BFS方法正确性的证明: 如果源点在直径上:显然正确.如果源点不在直径上:既然源点不在直径上那么直径

湖北恩施:警方租赁警犬街头巡逻震慑违法犯罪
恩施警方租赁警犬参与社会治安巡逻防控 张东平 摄 恩施警方租赁警犬参与社会治安巡逻防控 张东平 摄 中新网恩施1月17日电 (张东平)“哇,有警犬在巡逻!”1月16日晚9时许,在湖北恩施土家族苗族自治州城区,6条训练有素的警犬由训导员带队,来到广场、商业圈等人员密集场所徒步巡逻。 当晚,为加强人员密集场所治安防范、打击违法犯罪的能力,恩施州公安局探索通过租赁的方式,从武汉新月山犬业管理公
#Z0463. 巡逻1
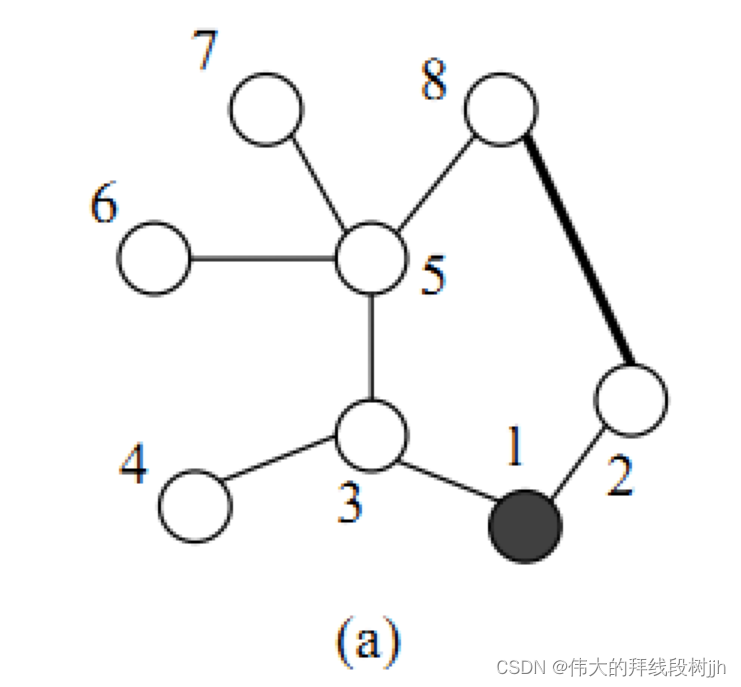
Description 在一个地区中有 n 个村庄,编号为 1, 2, ..., n。有 n – 1 条道路连接着这些村 庄,每条道路刚好连接两个村庄,从任何一个村庄,都可以通过这些道路到达其 他任一个村庄。每条道路的长度均为 1 个单位。 为保证该地区的安全,巡警车每天要到所有的道路上巡逻。警察局设在编号 为 1 的村庄里,每天巡警车总是从警察局出发,最终又回到警察局。 下图表示一个有 8
walking机器人仿真教程-应用-多点导航实现房间内巡逻检查
系列文章目录 walking机器人仿真教程-启动仿真环境walking机器人仿真教程-查看仿真环境相关话题walking机器人仿真教程-仿真控制walking机器人仿真教程-激光建图-仿真slam_toolbox算法建图walking机器人仿真教程-激光建图-仿真gmapping算法建图walking机器人仿真教程-激光建图-仿真cartographer算法建图walking机器人仿真教程
![【树的直径】洛谷_3629 [APIO2010]巡逻](/front/images/it_default.jpg)
【树的直径】洛谷_3629 [APIO2010]巡逻
题意 有一颗树,要在其中加入 K ( k ≤ 2 ) K(k\leq 2) K(k≤2)条边,使得本来遍历这颗树要经过的边数最少,同时加入的边一定要正好走过 1 1 1次。 思路 当 K = 1 K=1 K=1时,显然是在树的直径的两个点之间连一条边,因为这样可以少走一次直径,而直径又是最长的。 当 K = 2 K=2 K=2时,新建的边如果与之前的边没有环重叠的话也是和 K = 1 K=1

精准定位安全续航 无人机解决方案打造交通巡逻新模式
现代城市交通管理是城市现代化的重要组成部分,但传统的交通管理系统存在一系列复杂繁琐的问题,同时,交警执勤也存在较大的安全隐患。为应对这一挑战,复亚智能深入研究无人机技术及应用,推出了一套全面的无人机解决方案,旨在提高城市交通管理效率,使其更加智能安全。 一、数据采集终端 复亚智能无人机解决方案的数据采集终端具有高精度的定位导航能力,能够在任务中实现目标的精准定位和飞行航迹规划。在飞
基于单片机的消防巡逻小车设计
智能小车循迹与避障运动控制系统的设计 摘 要:本设计主要由STC89C52单片机来进行控制,通过输入输出两个端口控制驱动模块来调节电机的工作状态。本设计预利用机器视觉,通过识别条带状路标实现自主导航且利用超声波模块实时检测距离以实现避障功能,利用光电传感器模块自动循迹以实现循迹功能,通过液晶屏显示小车与障碍物之间的距离。本设计以STC89C52单片机,光电传感器,超声波模块和L298N驱动模块

ROS开发笔记(7)——利用amcl、move_base 进行导航、基于Python编写巡逻机器人导航代码
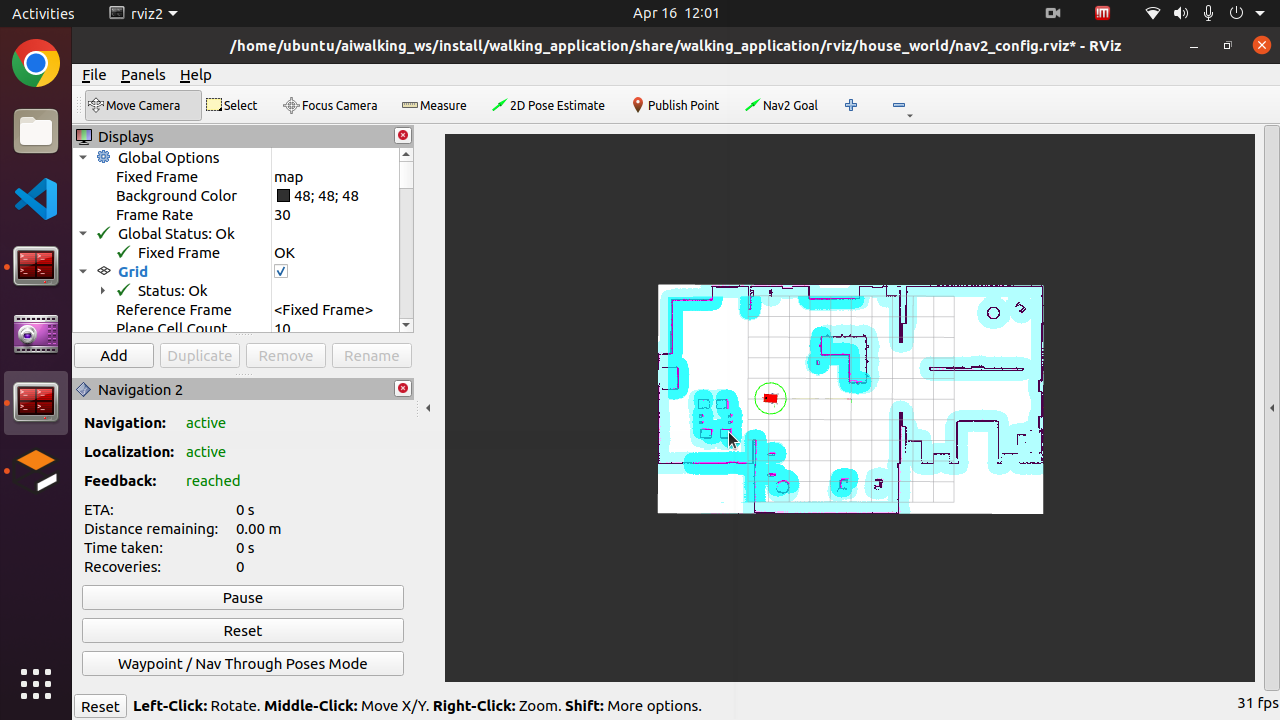
在前期构建地图的基础上,本文将利用 amcl(自适应蒙特卡洛定位算法)来在地图中定位机器人,然后在此基础上利用move_base 在地图中对机器人导航。主要内容如下: 1、amcl(自适应蒙特卡洛定位算法)节点基本原理 2、move_base 节点基本工作原理 3、在地图中定位机器人 4、在rivz中导航 5、编写代码导航 1、amcl(自适应蒙特卡洛定位算法)节点基本原理 1.1、
春运首日东莞启动直升机巡逻救援护航旅客
春运首日东莞公安交警携手中国人保财险启动直升机巡逻护航。图为东莞公安交警与人保救援直升机“空地配合”护航春运安全。 李映民 摄 春运首日东莞公安交警携手中国人保财险启动直升机巡逻护航。图为东莞公安交警与人保救援直升机“空地配合”护航春运安全。 李映民 摄 中新网东莞1月21日电 (李映民 李纯)为保障春运期间群众出行和道路交通安全,东莞市公安局交警支队联合中国人保财险东莞市分公司21日共同
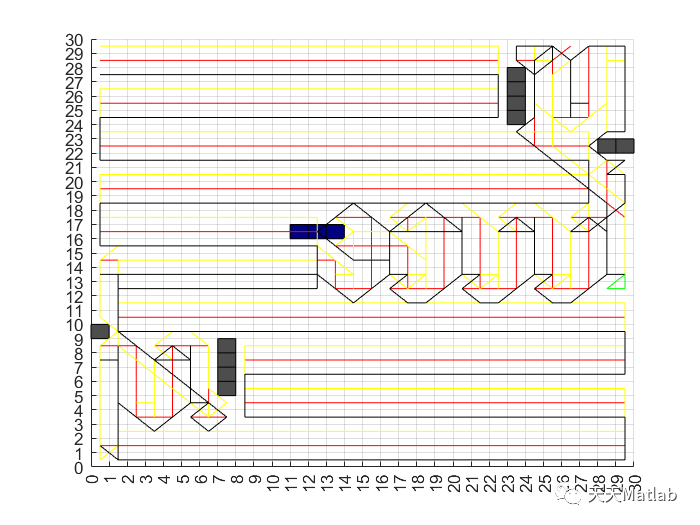
【编队】基于A星算法实现机器人编队栅格地图巡逻路径规划附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划

【内含代码】PID平衡控制在智能巡逻机器人上的应用
姿态平衡控制 在直立控制里面加入速度负反馈无法达到速度闭环的目的,而且还会破坏直立控制系统,因此在保证直立控制的优先级条件下,开发者们要把速度控制放在直立控制的前面,也就是速度控制调节的结果仅仅是改变直立控制的目标值。 根据经验可知,小车的运行速度和小车的倾角是相关的。比如要提高小车向前行驶的速度,就需要增加小车向前倾斜的角度,倾斜角度加大之后,车轮在直立控制的作用下需要向前运动保持小车平衡,

【内含实物图】一款可独立行走且支持远程对话的微型巡逻摄像头——嵌入式方案
上篇给大家分享了微型巡逻摄像头的整体硬件方案及各单元的工作原理。本篇将重点分享微型巡逻摄像头自平衡功能和移动控制功能的实现。 MCU固件开发 本demo直接使用涂鸦智能SC012-WD2摄像头,因此摄像头和APP相关固件程序,并不需要开发者进行开发。开发者只需要开发底盘小车平衡运动这方面即可。 1.姿态读取 在控制平衡之前,开发者需要先获取当前平衡姿态,即先读取MPU6050数据,参考如

智慧港口与无人机巡逻技术:走进未来的海上交通枢纽
在21世纪,随着全球贸易的日益繁荣,港口作为连接世界各地的重要交通枢纽显得尤为重要。为了提高港口的效率和安全性,智慧港口和无人机巡逻技术成为了最前沿的选择。其中,复亚智能无人机技术在智慧港口的建设和日常运营中扮演了至关重要的角色。 1、 什么是智慧港口? 智慧港口不单是一个充满高科技的港口,更是通过综合应用信息技术、自动化技术以及其他先进技术,使港口运营实现自动化、智能化和集成化,