本文主要是介绍2018 Workshop on Autonomous Driving (WAD)----自动驾驶中视觉感知的比赛,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
自动驾驶中视觉感知的比赛
目的:主要帮助理解视觉算法在自动驾驶中解决环境感知问题上的研究现状
这里不仅仅是视觉算法在自动驾驶中的应用,还定义了下面一系列现实中的问题来鼓励新算法与流程的提出:
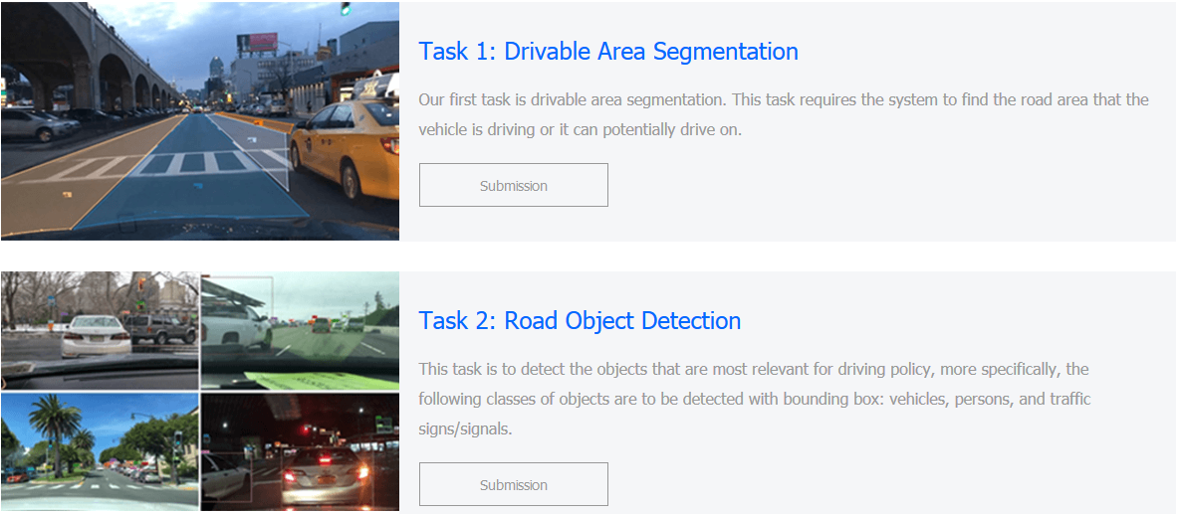
(1) Drivable Area Segmentation
(2) Road Object Detection
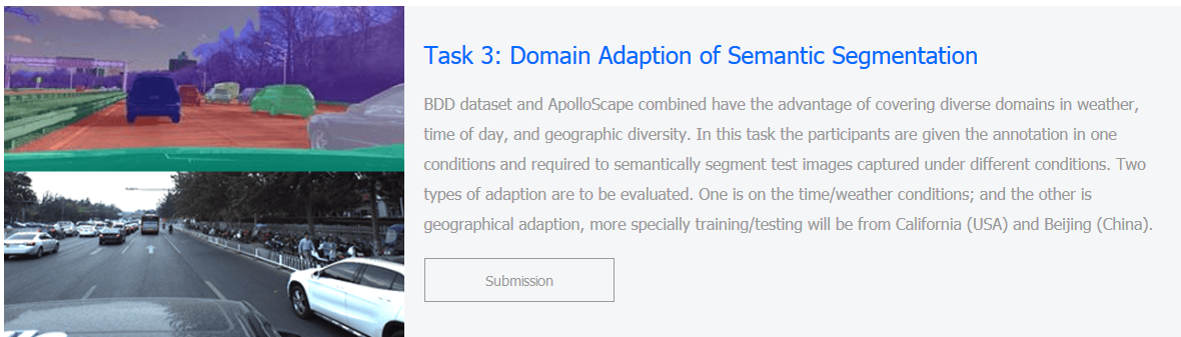
(3) Domain Adaptation of Semantic Segmentation
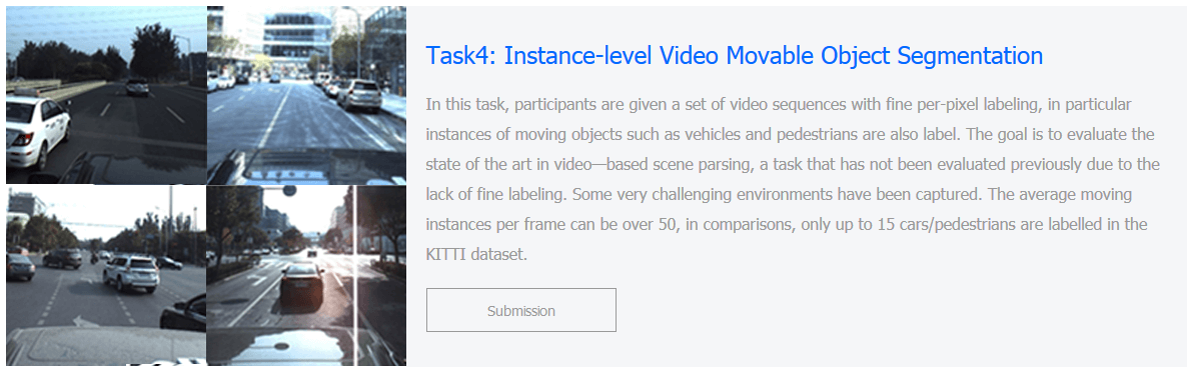
(4) Instance-level video moving object segmentation
Participation details can be found at http://wad.ai/challenge.html
(1)The BDD set
是由Berkeley DeepDrive (BDD)采集得来,包括100k个剪切的短视频,每一个40秒,在每个视频中有一个关键帧被标注;
主要采集地点California (USA)
(2)ApolloScape set
是由百度采集,contain survey grade dense 3D points and registered multi-view RGB images at video rate,而且每个像素与3D点都进行了语义标注,另外每张图像的精确的姿态信息也给出了。
主要采集地点Beijing (China)
目的:主要帮助理解视觉算法在自动驾驶中解决环境感知问题上的研究现状
这里不仅仅是视觉算法在自动驾驶中的应用,还定义了下面一系列现实中的问题来鼓励新算法与流程的提出:
(1) Drivable Area Segmentation
(2) Road Object Detection
(3) Domain Adaptation of Semantic Segmentation
(4) Instance-level video moving object segmentation
Participation details can be found at http://wad.ai/challenge.html
(1)The BDD set
是由Berkeley DeepDrive (BDD)采集得来,包括100k个剪切的短视频,每一个40秒,在每个视频中有一个关键帧被标注;
主要采集地点California (USA)
(2)ApolloScape set
是由百度采集,contain survey grade dense 3D points and registered multi-view RGB images at video rate,而且每个像素与3D点都进行了语义标注,另外每张图像的精确的姿态信息也给出了。
主要采集地点Beijing (China)
这篇关于2018 Workshop on Autonomous Driving (WAD)----自动驾驶中视觉感知的比赛的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








