感知专题

基于Qt实现系统主题感知功能
《基于Qt实现系统主题感知功能》在现代桌面应用程序开发中,系统主题感知是一项重要的功能,它使得应用程序能够根据用户的系统主题设置(如深色模式或浅色模式)自动调整其外观,Qt作为一个跨平台的C++图形用... 目录【正文开始】一、使用效果二、系统主题感知助手类(SystemThemeHelper)三、实现细节

CP-Net:用于生物细胞解析的实例感知部分分割网络|文献速递--基于深度学习的医学影像病灶分割
Title 题目 CP-Net: Instance-aware part segmentation network for biological cell parsing CP-Net:用于生物细胞解析的实例感知部分分割网络 01 文献速递介绍 实例分割是计算机视觉中的一个经典任务,用于识别图像中每个像素的对象类别(语义类型)并确定唯一的对象ID(实例索引)(Yi等,201

基于多模态大语言模型的摄像头实时感知交互
简介: 调用本地摄像头,通过多模态大语言模型实时感知世界,并进行交互 界面: 代码: import tkinter as tkfrom tkinter import ttkfrom PIL import Image, ImageTkimport cv2import requests# 定义处理函数def capture_and_send():# 从摄像头读取当前帧ret, fra

Nature Communications:解码人类触觉感知与运动神经控制机理,用仿生手重现类人触觉感知与抓握
近日,由曼彻斯特大学、牛津大学、吉林大学、索尔福德大学等多所机构组成的国际研究团队,在Nature Communications期刊上发表了一篇重要研究成果,题为Human tactile sensing and sensorimotor mechanism: from afferent tactile signals to efferent motor control。该研究首次结合人体神经传导
如何在态势中嵌入感知?
态势感知是对事物发展的各种情况的估计、判断和理解,而感知是通过感官对事物的认识和了解。要在态势过程中嵌入感知过程,你可以考虑以下步骤: 1、确定态势和感知的要素:首先,明确态势和感知所涉及的关键要素。态势可能包括环境、目标、威胁等,而感知可以涉及视觉、听觉、触觉等感官信息。 2、设计感知机制:根据态势的需求,设计相应的感知机制。这可以包括使用传感器、监测设备、数据分析工具等来获取相关的感知数据。

推荐模型-上下文感知-2015:FFM模型【在FM基础上引入特征域】【每个特征对应的不是唯一一个隐向量权重,而是一系列,与每个特征域都计算出一个隐向量权重】【FM:O(kn);FFM:O(knf)】
Yuchin Juan et al. “Field-aware Factorization Machines for CTR Prediction” in RecSys 2016. https://github.com/rixwew/pytorch-fm 2015年,Criteo基于FM提出的FFM在多项CTR预估大赛中夺魁,并被Criteo、美团等公司深度应用在推荐系统、CTR预估等领域。

职业本科物联网与智能感知实训室解决方案
一、前言 在当今这个数字化、智能化飞速发展的时代,物联网(IoT)与智能感知技术已成为推动产业升级、促进经济社会发展的重要力量。为了适应这一趋势,培养具备物联网技术应用与智能感知系统设计能力的高素质技术技能型人才,唯众深耕职业教育领域,精心打造了《职业本科物联网与智能感知实训室解决方案》。本方案旨在通过高度仿真的实训环境、先进的教学设备以及系统化的课程体系,全方位提升学生的实践操作能力、创新

认知信号分类:利用人工智能提高频谱感知能力
提高射频频谱感知能力对于电子情报(ELINT)和一般电子战(EW)应用至关重要。 总体而言,这是提高频谱共享效率的基础。这一点非常重要,因为有更多的无线电、通信系统、雷达和许多其他应用(包括物联网设备)在频谱中运行,而电子战只是其中的一个子集。 在这种拥挤的电磁环境情况下,敌方辐射源在伪自己的特征方面变得更加聪明,看起来就像中立的辐射源。 人工智能系统在各种信噪比的信号分类中都能


一款电容型、非接触式感知的智能水浸模组-WS11
水侵模组 - WS11(Water Sensor-MC11S)是一款电容型、非接触式感知的智能水浸模组,集成了高集成度差分式数字电容芯片MC11S。模组内嵌MCU,通过UART输出电容和检测状态信息,进行算法分析,有效滤除振动、凝露等干扰,实现有水/无水以及不同状态的准确区分,并可同时提供环境温度信息。 WS11水浸模组可穿透1-10mm非金属容器壁,测量到是否有液体的不同电容变化,有效克服容器

Python(PyTorch)多语言图像感知质量指标算法
🎯要点 🎯算法实现:🖊PyTorch单尺度和多尺度质量指标算法 | 🖊C++单尺度质量指标算法 | 🖊Rust多尺度质量指标算法 | 🖊LabVIEW单尺度质量指标算法 | 🖊MATLAB单尺度质量指标算法 | 🖊PyTorch完整参考图像质量测量指标、和分布式图像特征质量测量指标 | 🖊多尺度质量模型应用:图像压缩,视频压缩、端到端优化图像压缩、神经图像压缩、GPU变速图像压

基于感知哈希算法的视觉目标跟踪
偶然看到这三篇博文[1][2][3],提到图片检索网站TinEye和谷歌的相似图片搜索引擎的技术原理。以图搜图搜索引擎的使命是:你上传一张图片,然后他们尽全力帮你把互联网上所有与它相似的图片搜索出来。当然了,这只是他们认为的相似,所以有时候搜索结果也不一定对。事实上,以图搜图三大搜索引擎除了上面的老牌的TinEye和Google外,还有百度上线不算很久的新生儿:百度识图。之前听余凯老师的一个D

HarmonyOS SDK助力鸿蒙原生应用“易感知、易理解、易操作”
6月21-23日,华为开发者大会(HDC 2024)盛大开幕。6月23日上午,《HarmonyOS开放能力,使能应用原生易用体验》分论坛成功举办,大会邀请了多位华为技术专家深度解读如何通过根技术、开放能力、场景化控件等亮点能力,基于人的感知及操作习惯进而设计出更简单易用的鸿蒙原生应用体验,并邀请头部优秀应用介绍其开发实践,分享其在体验创新与简易开发中的经验。 原生易用作为六大鸿蒙原生体验之一
自动驾驶⻋辆环境感知:多传感器融合
目录 一、多传感器融合技术概述 二、基于传统方法的多传感器融合 三、基于深度学习的视觉和LiDAR的目标级融合 四、基于深度学习的视觉和LiDAR数据的前融合方法 概念介绍 同步和配准 时间同步 标定 摄像机内参标定(使用OpenCV) 摄像机与LiDAR外参标定 空间同步 具体应用 4.1 BEV-LaneDet 4.2 BEVFormer v2 一、多传感器融

2D环境感知CenterNet安装
项目地址: https://github.com/xingyizhou/CenterNet 搭建环境并配置CenterNet 这一步主要参考文档INSTALL.md, 但请注意以下几点, 可以避免一些问题。 1. 在文档第1歩中, 若cuda版本是10.0之后的, 使用 conda install pytorch=1.0 torchvision -c pytorch 安装1.0以上的p

图像处理与视觉感知复习--三维重建基础
文章目录 完整的摄像机模型(摄像机内外参数)理解三个参考系齐次坐标系中的投影变换 摄像机标定单视图几何无穷远点、无穷远线、无穷远平面影消点、影消线 三维重建基础与极几何极几何、本质矩阵与基础矩阵 双目立体视觉视差或深度的推导过程 完整的摄像机模型(摄像机内外参数) 径向畸变:图像像素点以畸变中心为中心点,沿着径向产生的位置偏差,从而导致图像中所成的像发生形变 理解三个参考系
ECCV2020 | 300+FPS!超快的结构感知车道检测新网络
点击上方蓝字,获得更多精彩内容 精彩内容 浙大提出:超快速结构感知的车道线检测网络 ,在速度和准确性方面综合表现出色!轻量级版本速度高达300+ FPS!论文链接:https://arxiv.org/abs/2004.11757代码刚开源:https://github.com/cfzd/Ultra-Fast-Lane-Detection作者团队:浙江大学(李玺团队) 1 摘要 从上图可以看出
![[CVPR论文介绍] BASNet:边缘感知的显著性物体检测](https://img-blog.csdnimg.cn/img_convert/f04830207a0d927c2d574f1268043185.png)
[CVPR论文介绍] BASNet:边缘感知的显著性物体检测
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶” 作者:Jae Duk Seo 编译:ronghuaiyang 导读 和昨天的那篇U²Net同作者,但是更早一点。 大多数深度学习方法→在显著性预测时侧重于区域预测→但现在他们创建了一个新的损失函数→也考虑了目标的边界。 显著性预测→我们人类擅长于此→关注给定的图像或视频中的“重要”目标。(但没有很多方法考虑目标的边界)。现在有很

图像处理与视觉感知复习--频率域图像增强图像变换
文章目录 图像变换与信号分解正弦信号与傅里叶级数傅里叶变换离散傅里叶变换(DFT)频率域滤波 图像变换与信号分解 空间域:就是像素域,在空间域的处理是在像素级的处理,如像素级的叠加。 频率域:任何一个波形都可以分解用多个正弦波之和。每个正弦波都有自己的频率和振幅。所以任意一个波形信号又自己的频率和振幅的集合。 为了有效和快速的对图像进行处理和分析,常常需要将原定义在图像空间的图像

图像处理与视觉感知复习--图像复原
文章目录 图像复原与图像增强图像退化模型图像复原模型空间域滤波复原(唯一退化是噪声)频率域滤波复原(削减周期噪声) 图像复原与图像增强 图像复原与图像增强的目的都是在某种意义上对图像进行改进,即改善图像的视觉效果,但两者使用的方法和评价标准不同: 图像增强技术一般要利用人的视觉系统特性,目的是取得较好的视觉效果,不需要考虑图像退化的真实物理过程,增强后的图像也不一定要逼近原始

Apollo camera 感知部分 目标检测源码阅读分析
障碍物检测分为detector transformer postprocessor tracker几个部分 kitti 基于单目的3D目标检测的预备知识点: 首先是yolo3d 3d目标检测输出结果为kitti的3D格式,(其中3d信息部分是以相机坐标系为参考坐标系的) 首先介绍下kitti 3d object detection障碍物标注的的标注文件格式 KITTI数据集,label文件

城市行人感知新方法:基于音频的行人检测与预测
智慧城市的重要组成部分之一是部署传感器技术来监控和控制城市的各种服务和功能。城市使用各种传感器来评估城市服务的提供和获取方式,这有助于缓解瓶颈问题,并提前预警潜在的服务中断。了解城市服务需求的时间和空间变化有助于更好的资源利用、更公平的服务提供以及更大的可持续性和弹性。目前,各种传感器已经部署在城市环境中,特别是在交通领域,也用于监测环境条件、能源、水和废物的流动,以及追踪犯罪活动。

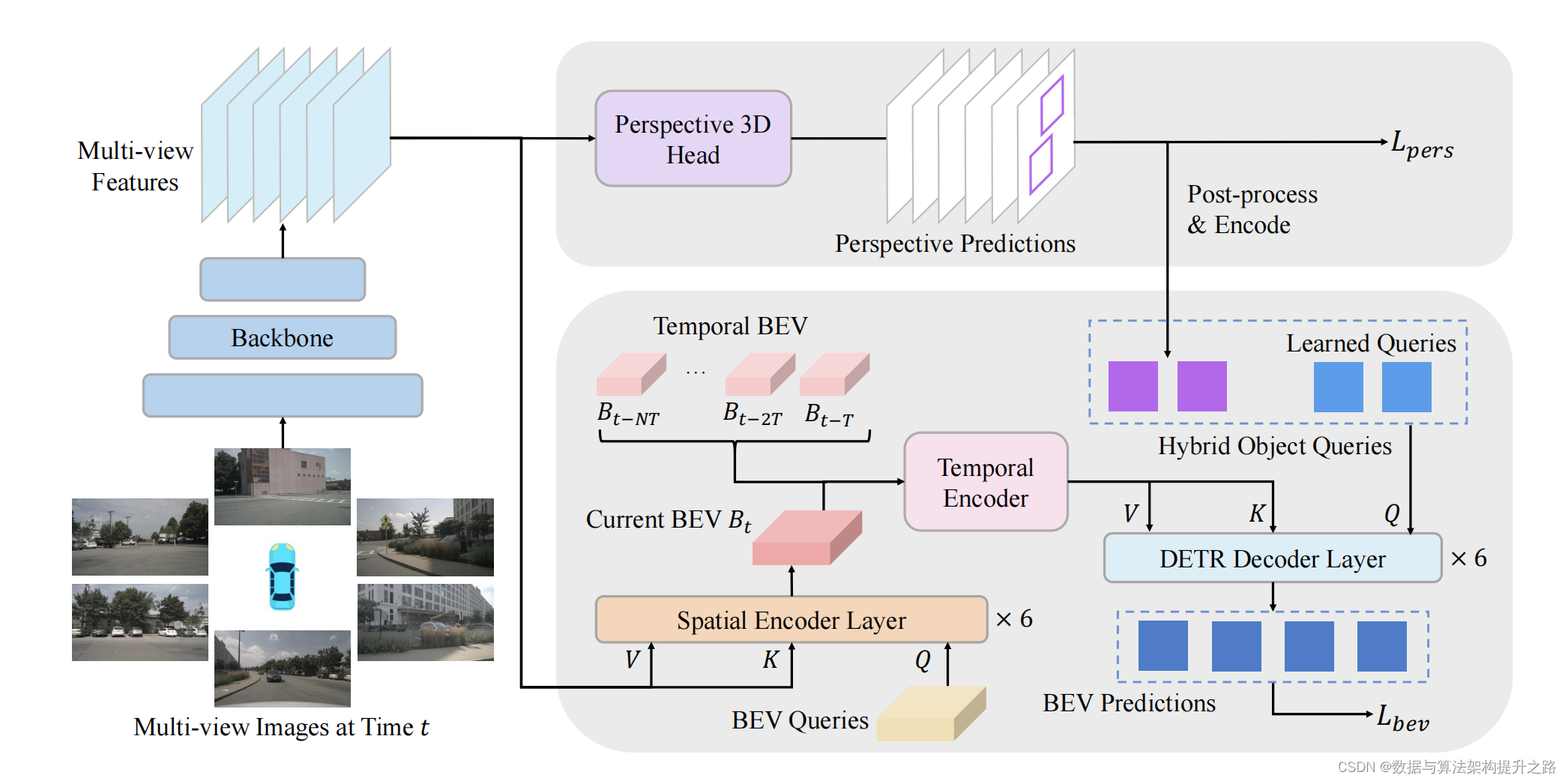
【多视图感知】BEVFormer: Learning Bird’s-Eye-View Representation
BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers 论文链接:http://arxiv.org/abs/2203.17270 代码链接:https://github.com/fundamentalvision/BEVFormer

图像处理与视觉感知复习--图像特征描述图像生成
文章目录 角点(关键点)的特点图像分类的流程梯度方向直方图(HOG)流程平移、旋转和尺度特征(SIFT)流程常用的图像生成模型GAN的原理Diffusion Model的原理mAP计算方法 角点(关键点)的特点 紧致&高效:关键点数目比像素少很多显著性:关键点是独特的、有特色的局部特性:关键点占据图像的相对较小区域;对杂波和遮挡具有鲁棒性重复性/再现性:无论几何或光学变换,同一关
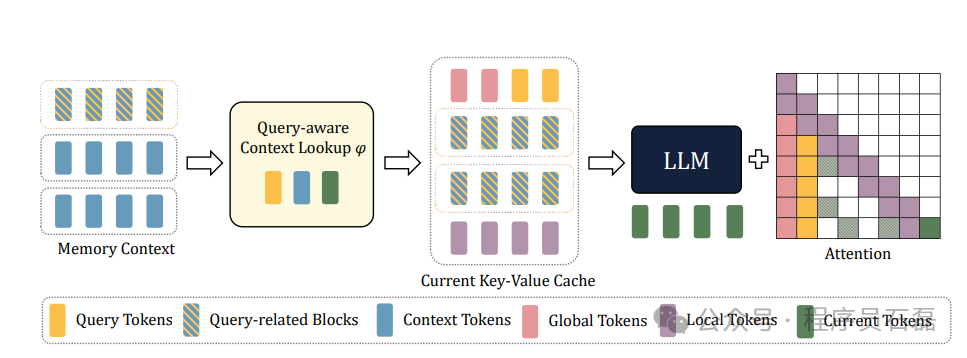
快速LLaMA:面向大型语言模型的查询感知推理加速 论文摘要翻译与评论
论文摘要翻译与评论 论文标题: QuickLLaMA: Query-aware Inference Acceleration for Large Language Models 提出的框架 我们Q-LLM框架的示意图。来自记忆上下文的输入被分割成记忆块,通过查询感知的上下文查找来搜索与查询相关的块。目前的键值缓存由全局标记、查询标记、查询相关块和局部标记组成。它们共同形成一个新的上下文窗

压缩感知之最优化研究现状
原文链接:http://blog.sciencenet.cn/blog-497160-388963.html Nyquist属于 local采样方式,其对应的信号重建算法是线性的; CS采用global的非自适应测量方式,从而大大减少数据采集量,然而其付出的代价是信号的重建算法的软件成本。因此,CS的最优化算法好坏直接影响到CS理论能否实用。 区别于Nyquist理论的线性感知问题